(Л
11 13
О
СО
О5 Ю
СО
О5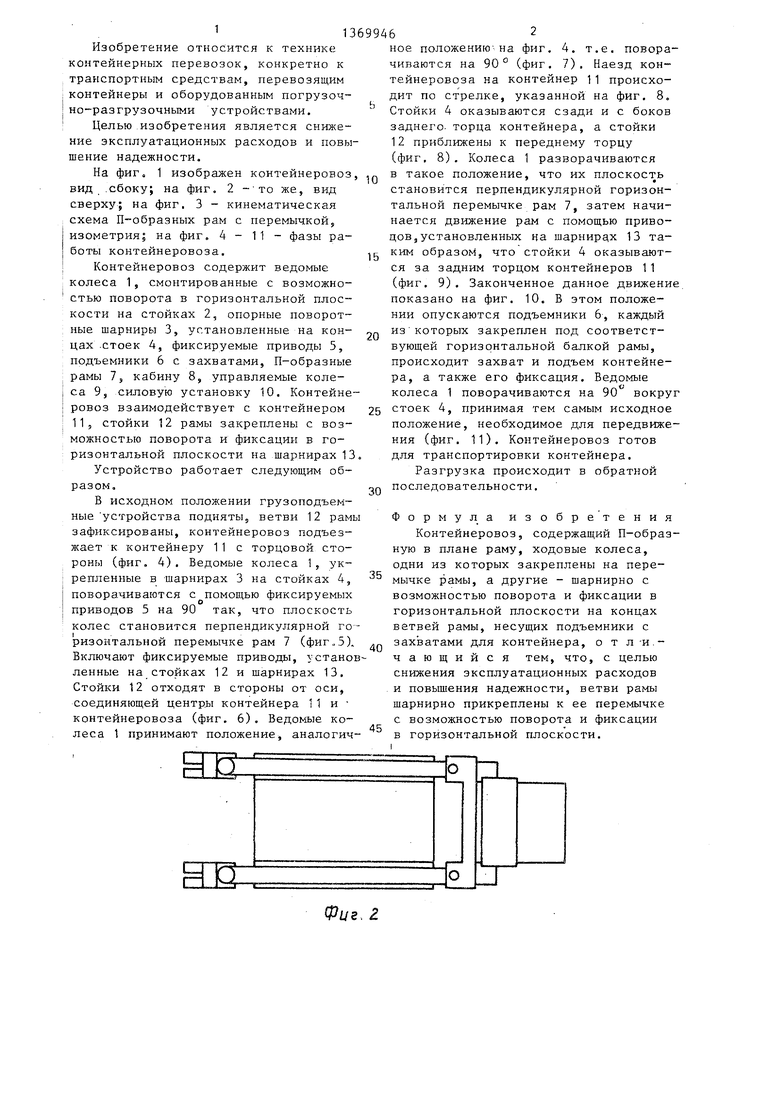
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕРОВОЗ | 2008 |
|
RU2389619C2 |
| Контейнеровоз | 1986 |
|
SU1369947A1 |
| Контейнеровоз | 1986 |
|
SU1393679A1 |
| Контейнеровоз | 1987 |
|
SU1527035A2 |
| Контейнеровоз | 1986 |
|
SU1402459A1 |
| Контейнеровоз | 1989 |
|
SU1657424A1 |
| Контейнеровоз | 2018 |
|
RU2692289C1 |
| КОНТЕЙНЕРОВОЗ | 1996 |
|
RU2115571C1 |
| КОНТЕЙНЕРОВОЗ | 2000 |
|
RU2174921C1 |
| СПОСОБ КОНТЕЙНЕРНОГО ТРАНСПОРТИРОВАНИЯ ЛЕГКОВЕСНЫХ ГРУЗОВ И КОНТЕЙНЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ЛЕГКОВЕСНЫХ ГРУЗОВ | 1993 |
|
RU2081764C1 |
Изобретение относится к технике контейнерных перевозок,а также,к транспортным средствам, перевозящим контейнеры и оборудованным погрузочно- разгрузочными устройствами. Цель изобретения состоит в снижении Э1;сп- луатационных расходов и повышении надежности. В контейнеровозе ведомые колеса 1 закреплены на концах стоек 4 П-образной рамы 7 с возможностью поворота и фиксации в горизонтальной плоскости, управляемые колеса 9 установлены на перемычке П-образной рамы. Стойки 12 рамы 7 закреплены в фиксирующихся поворотных шарнирах 13 и снабжены приводом поворота в горизонтальной плоскости. 11 ил.
Фив.;
Изобретение относится к технике контейнерных перевозок, конкретно к транспортным средствам, перевозящим контейнеры и оборудованным погрузоч- но-разгрузочными устройствами.
Целью .изобретения является снижение эксплуатационных расходов и повышение надежности.
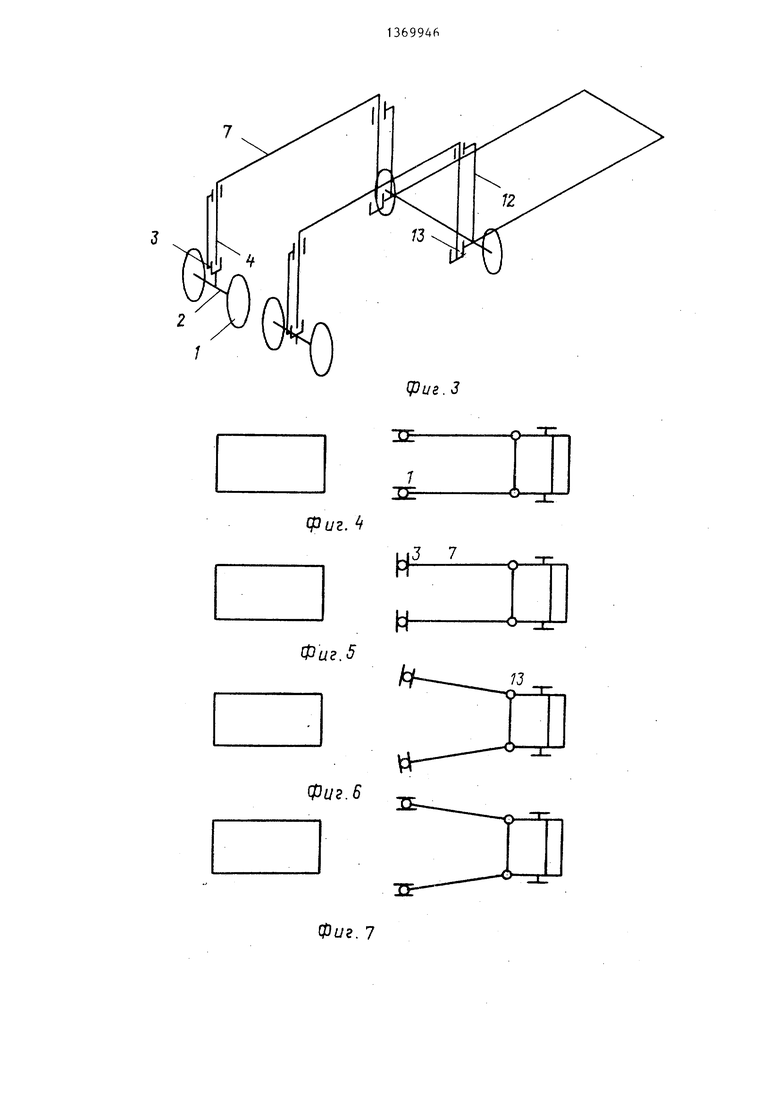
На фиг. 1 изображен контейнеровоз, вид .сбоку; на фиг. 2 - то же, вид сверху; на фиг, 3 - кинематическая схема П-образных рам с перемычкой, изонетрия; на фиг. 4 - 11 - фазы работы контейнеровоза. 1 Контейнеровоз содержит ведомые
колеса 1, смонтированньге с возможно- стью поворота в горизонтальной плоскости на стойках 2, опорные поворотные шарниры 3, установленные на концах .стоек 4, фиксируемые приводы 5, подъемники 6 с захватами, П-образные рамы 7, кабину 8, управляемые коле- I са 9j силовую установку 10. Контейне- i ровоз взаимодействует с контейнером Ml, стойки 12 рамы закреплены с возможностью поворота и фиксации в горизонтальной плоскости на шарнирах 13
Устройство работает следующим образом.
В исходном положении грузоподъемные устройства подняты, ветви 12 рам зафиксированы, контейнеровоз подъезжает к контейнеру 11 с торцовой стороны (фиг. 4). Ведомые колеса 1, ук- ; репленные в шарнирах 3 на стойках 4, поворачиваются с помощью фиксируемых приводов 5 на 90 так, что плоскость колес становится перпендикулярной горизонтальной перемычке рам 7 (фиг .5). Включают фиксируемые приводы, устаноленные на стойках 12 и шарнирах 13. Стойки 12 отходят в стороны от оси, соединяющей центры контейнера 11 и контейнеровоза (фиг. 6). Ведомые колеса 1 принимают положение, аналогич
Фиг. 2
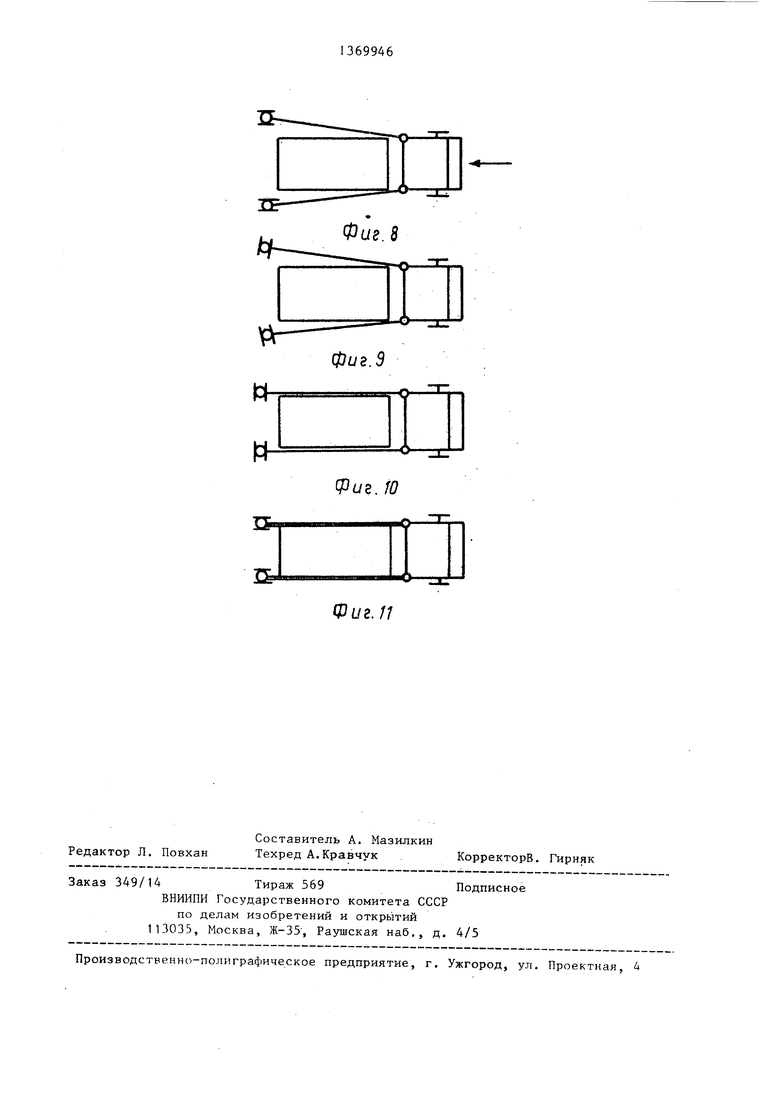
нов положению на фиг. 4. т.е. поворачиваются на 90° (фиг. 7). Наезд контейнеровоза на контейнер 11 происходит по стрелке, указанной на фиг. 8. Стойки 4 оказываются сзади и с боков заднего, торца контейнера, а стойки 12 приближены к переднему торцу (фиг, 8). Колеса 1 разворачиваются в такое положение, что их плоскость становится перпендикулярной горизонтальной перемычке рам 7, затем начинается движение рам с помощью приводов, установленных на шарнирдх 13 та- ,- КИМ образом, что стойки 4 оказываются за задним торцом контейнеров 11 (фиг. 9). Законченное данное движение, показано на фиг. 10. В этом положении опускаются подъемники 6, каждый из которых закреплен под соответствующей горизонтальной балкой рамы, происходит захват и подъем контейнера, а также его фиксация. Ведомые
tJ
колеса 1 поворачиваются на 90 вокруг стоек 4, принимая тем самым исходное положение, необходимое для передвижения (фиг. 11). Контейнеровоз готов для транспортировки контейнера.
Разгрузка происходит в обратной последовательности.
0
5
0
Формула изобретения
Контейнеровоз, содержащий П-образ- ную в плане раму, ходовые колеса, одни из которых закреплены на перемычке рамы, а другие - шарнирно с возможностью поворота и фиксации в горизонтальной плоскости на концах ветвей рамы, несущих подъемники с захватами для контейнера, о т л-и.- чающийся тем, что, с целью снижения эксплуатационных расходов и повышения надежности, ветви рамы шарнирно прикреплены к ее перемычке с возможностью поворота и фиксации в горизонтальной плоскости.
Фиг.
Фиг.5
Фиг.6
Фиг. 7
(Рие.з
Фиг. 8
фиг.9
Фие.Ю
Фиг.П
| Транспортное средство для перевозки тяжеловесных крупногабаритных грузов | 1975 |
|
SU676481A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
