:
11
Изобретение относится к легкой промьшшенности, а именно к устройствам для автоматизации вспомогательных операций, таких как вьщеление полуфабриката из пачки и подача его в зону обработки, удаление полуфабриката из зоны обработки и укладывание его в пачку, перемещение полуфабриката с одного уровня на другой, перемещение по определенным пространственным траекториям мехового полуфабриката, плоских деталей из натуральной и искусственной кожи, картона и ТсП.
Цель изобретения - упрощение конструкции.
На чертеже изображена кинематическая схема устройства.
Устройство содержит основание 1, на котором щарнирно установлен качающийся ведущий рычаг 2, имеющий силовой привод в виде пневмоцилиндра 3, шарнирно закрепленного на основании посредством стойки 4, имею- щей вертикальную направляющую и горизонтальные пазы и обеспечивающей сов- местно с пазом 5 основания пространственную регулировку точки закрепления пневмоцилиндра. Ведомый рычаг 6 в средней его части соединен шарниром 7 с ведуш 1м рычагом. Схваты 8 с чувствительными элементами 9 щарнирно установлены на одном конце ведомого рычага, а на другом его конце шарнирно установлена прямоугольная рамка 10 с роликами 11, охватываюпщм пространственную направляющую 12, жестко закрепленную на основании.
Устройство работает следующим образом.
В зависимости от заданного цикла работы в одном из крайних положений, когда схваты 8 подведены к поверх- ности полуфабриката, по команде чувствительных элементов 9 происходит срабатывание схватов. Затем автоматически срабатывает пневмоцилиндр 3, и захваченный полуфабрикат переме- щается исполнительным механизмом по заданной траектории, определяемой
12
формой пространственной направляющей 12. Перемещение полуфабриката происходит до момента срабатывания чувствительных элементов 9 схватов, т.е. пока схваты не дойдут до поверхности, на которую производится укладка полуфабриката, при этом схваты освобождают полуфабрикат и исполнительный механизм совершает обратный ход.
Для переналадки устройства,на новую траекторию перемещения достаточно установить на основании направляющую 12 .заданной формы и при необходимости изменять расположение пневмоцилиндра 3.
Формула изобретения
1.Устройство для пространственного перемещения меховых шкур и кож, содержащее основание, смонтированный на основании рычажный исполнительный механизм, оснащенный схватами, пространственную направляющую, жестко закрепленную на основании
и определяющую траекторию перемещения схватов, и силовой привод, о т- личающееся тем, что, с целью упрощения конструкции, исполнительный механизм состоит из двух рычагов: ведущего, одним концом шарнирно установленного на основании и связанного шарнирно с силовым приводом, и ведомого, шарнирно соединенного в его средней части с ведущим рычагом, при этом схваты щар- нирно установлены на одном конце ведомого рычага, а другой его конец служит для взаимодействия с пространственной направляющей.
2.Устройство по п. 1, о т л и- ч ающе е с я тем, что силовой привод выполнен в виде пневмоцилиндра, шарнирно укрепленного на основании с возможностью пространственной регулировки точки закрепления.
3.Устройство по п. 1, отличающееся тем, что схваты оснащены чувствительными злементами.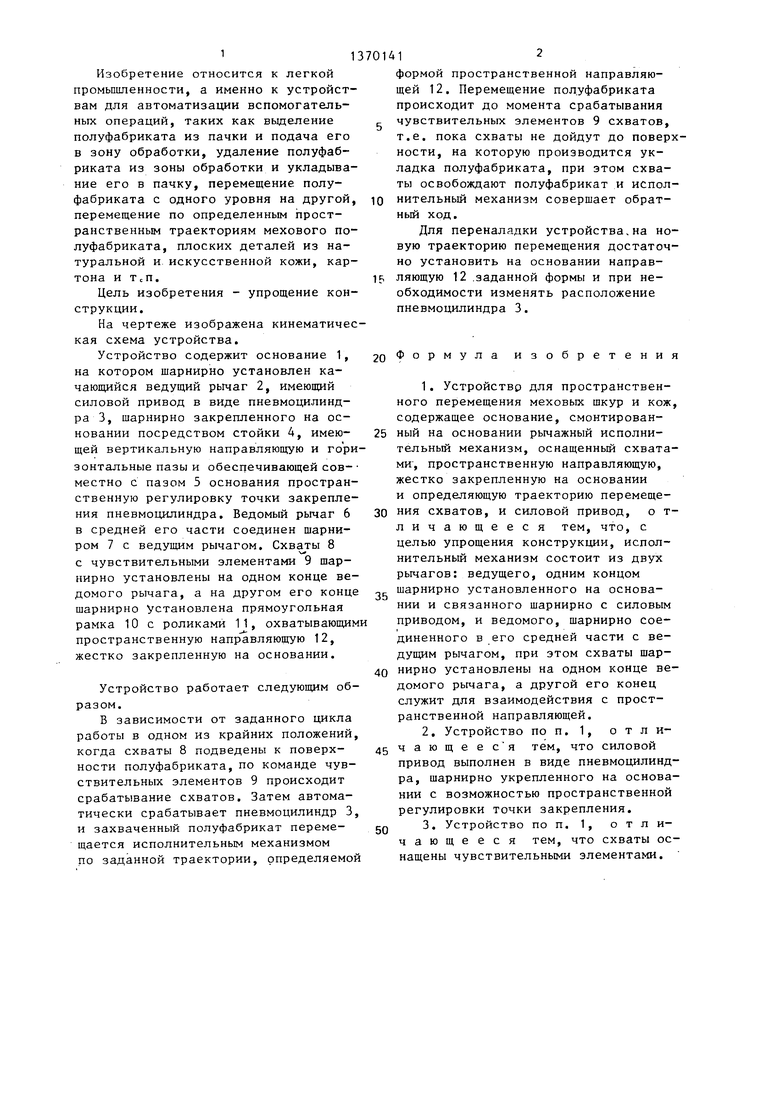
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для загрузки-разгрузки технологических машин | 1987 |
|
SU1445943A1 |
| Гибкая производственная система | 1988 |
|
SU1780992A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Устройство для открывания клапанных мешков и надевания их на патрубки расфасовочных машин | 1985 |
|
SU1323469A1 |
| Устройство для подачи швейных изделий из стопы в зону обработки | 1987 |
|
SU1498681A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК ПРОТЕКТОРОВ НА СБОРОЧНЫЙ БАРАБАН | 1984 |
|
SU1142989A1 |
| Устройство для транспортирования и поворота гибких листовых материалов | 1989 |
|
SU1632892A1 |
| Устройство для смазки перемещающихся элементов | 1978 |
|
SU874525A1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |

Изобретение относится к легкой промьшшенности. Цель изобретения упрощение конструкции. На основании смонтирован рычажньй механизм, оснащенный схватами. Рычажный механизм имеет ведущий и ведомый рычаги. Ведущий рычаг одним концом шарнирно установлен на основании и шарнирно связан с силовым приводом. Ведомый рычаг шарнирно соединен в своей средней части с ведущим рычагом. Схваты шарнирно установлены на одном конце ведомого рычага. Другой конец ведомого рычага взаимодействует с пространственной направляющей, которая жестко закреплена на основании и определяет траекторию перемещения схватов. 2 з.п. ф-лы, 1 ил.
| Манипулятор | 1980 |
|
SU1050863A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
