9llZ. 1
$
(Л
со
со
о со
Изобретение относится к захватным устройствам для промышленных роботов и маHHIiy.IHTOpOEi.
He.ibK) изобретения является расн1ире- ние тсхно. югическил возможностей схвата иутем обесиечеиия захвата сложноконтур- ных дета л е 11.
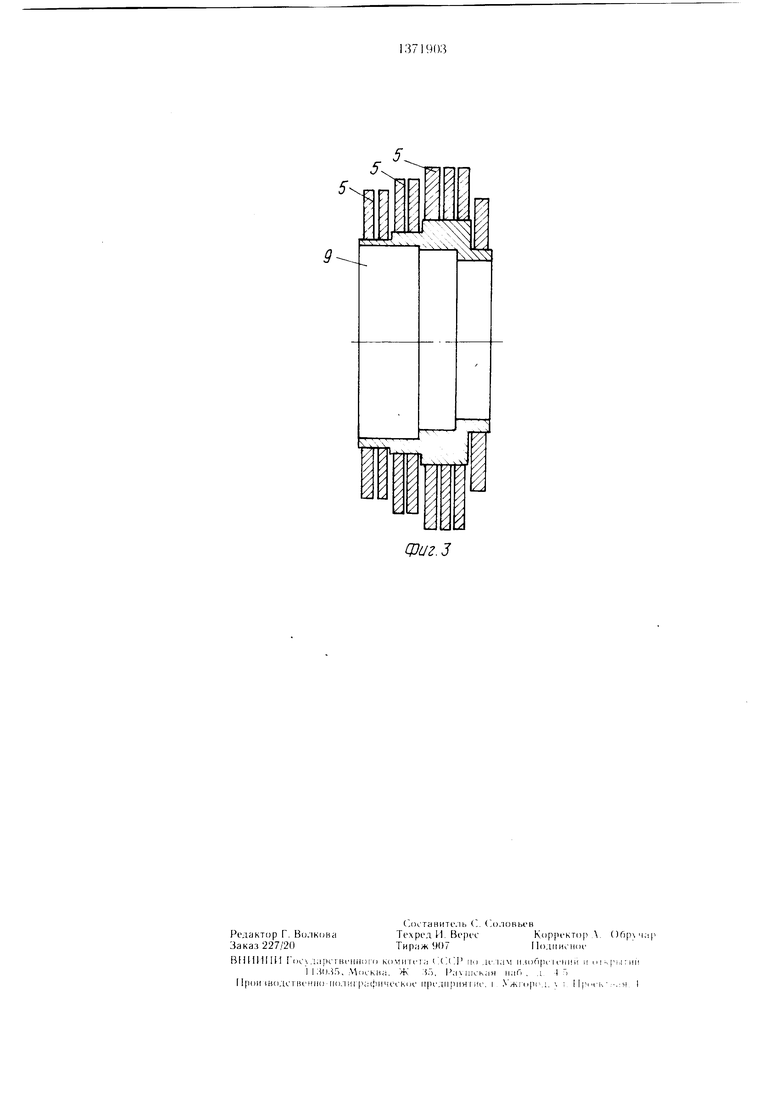
На фиг. 1 изображен схват, обншй вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 )арианг захвата детали.
( хват имеет корпус 1, в котором смонтирован иривод 2, например нневматический, и установлены две оси 3, являющиеся опорами для захватных рычагов 4, вынолнен- ньгх м ногоэ. К ментными из одинаковых элементов 5. Каждый элемент имеет губку 6 и связан с приводом 2 носредством вынол- иенного на нем зубчатого сектора. Элементы 5 захватного )ыча1 а могут быть изготовлены как одн(.) из нружинного листового мате1)иала (методом штамновки или э;1ек- троэрознонной обработки) и, 1и из упругой нласгмассы (методом обьемного формования ).
Элеменгы 5 устан()влен1 1 на оси 3 в корпусе 1
Зубчатый сектор каждо1 о элемента 5 взаимоде11ствует с рейко11 7 Н1тока 8, имею- Hiero двухстороннюю зубчатую нарезку и связанного с норншем нневматическо1Ч) нри- вода 2.
(.хват иром1)11нленного )обота работаег следуK)HuiM образом.
IIpii подаче давления в )авую часть привода 2 П1ТОК 8 неремен1ается влево и при iioMonui двухсгоронне рейки 7. воздеГктвуя на зубчатые сектор1 1, поворачивает вокруг осей 3 элементы 5 захватных рычаюв. в результате чего губки (i охватЬ)И1акл де- галь 9. При про.толжеиии ;1вижения Н1тока М секто)Ь1 элементов 5 по1 о|и1чиваются на донолпн гельиы| 1 угол (по (нмичине различ- Hbiii в .(ависимости ог развиваемого усилия в приводе 2 и суммарной жесгкости элементов), в го же в)емя , уж.е коснувп1иеся
детали 9, остаются ненодвижными относительно захваченной детали 9. В результате элемент 5 изгибается и компенсирует раз- iniuy относительиьз1х неремещсний зубчатого сектора и 1Л бки 6.
В случае захвата детали 9, имеющей простой контур, нанример цилиндрический, все элементы 5 захватного рычага одинаково деформируются (изгибаются).
В случае захвата детали 9, имеющей сложный контур, нанример ступенчатый, конический или др. вида, в контакт с деталью первыми встунают элементы 5, расположенные напротив больн1его размера детали. При дальнейн1ем движении штока 5 8 все элементы 5 поворачиваются на допол- нитель)ые углы и в контакт с детатью встунают последовательно с.чедуюпще элементы 5, охватывая дета.ь 9, начиная с ее боль- Hiero размера и ко}1чая ее меньшим раз.ме- ром. В этом случае элементы о из1-ибаются по-разному: в Menbineii мере - захватываю- Н1ие деталь за маль1Й размер, и в больн1ей мере захват|1|вак)|цие деталь за наиболь- 1ПИЙ )азмер, т.е. встунаюпше в контакт с деталью нервыми.
Таким образом, при захвате деталей в )аботе участвуют все элементы 5 захватных рычагов, обеспечивая многоконтактный захват детали.
0
5
Формула изобретения
Схват нром1 1Н1,;1енн()го робота, содержащий корпус и привод со штоком, связанный с устапов.ленными на осях захватными рыча- 1ами с губками, отличающийся тем, что, с нелью расн1ирення технек югических возмож- носгей путем обеспечепия захвата сложно- контурных деталеГи каждьн захватный рычаг выполнен мног()э.лементпым из упругого материала, нри этом элементы каждого рычага смонтированы па соответствующей оси п имеют возможность изгиба в плоскости, перпендикулярной указанной (х:и.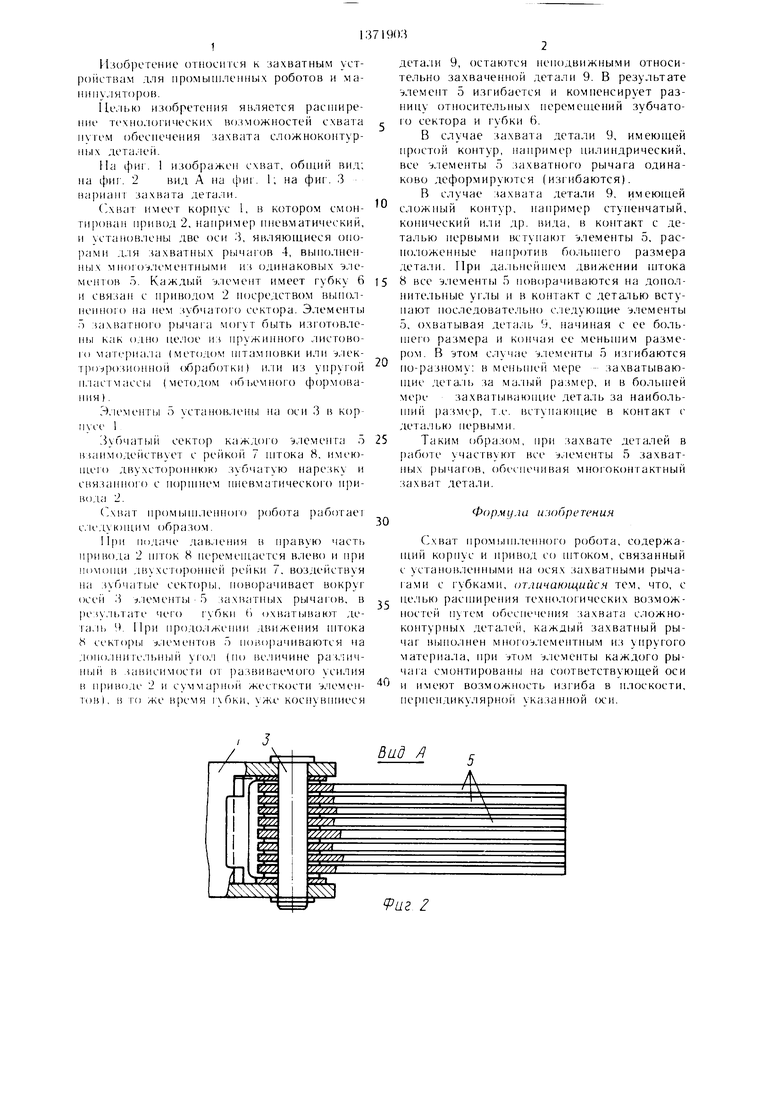
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Захватное устройство робота | 1987 |
|
SU1423373A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| Захватное устройство | 1986 |
|
SU1579773A1 |
Изобретение относится к захватным устройствам промышленных роботов-манипуляторов. Цель изобретения - расширение технологически.х возможностей путем обеспечения захвата сложноконтурных деталей. В корпусе 1 схвата смонтированы привод 2, шток 8 с двухсторонней рейкой 7 и оси 3, на которых установлены многоэлементные захватные рычаги. Каждый элемент рычага выполнен как одно целое из ynpyi oro материала и имеет губки 6 и зубчатый сектор, взаимодействующий с рейкой 7. При захвате сложноконтурной детали первыми в контакт с нею вступают элементы рычага, расположенные напротив большего размера детали и изгибaюп иecя при дальнейшем перемешении привода. В контакт с деталью при этом вступают элементы захватного рычага, расположенные напротив меньп1их размеров детали. Таким образом обеспечивается многоконтактный захват детали. 3 ил.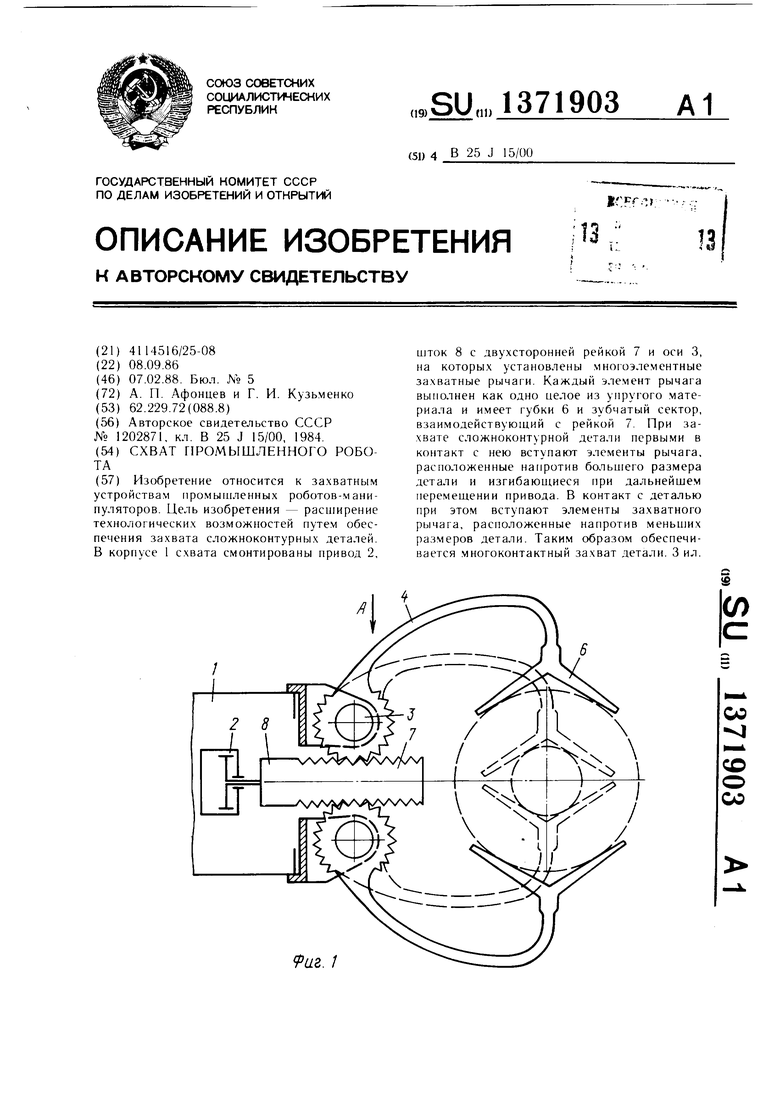
Вид Л
±п:
Риг Z
fx
сриг.З
| Захватное устройство | 1984 |
|
SU1202871A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
