и выталкивающим элементом, располо- жeнlj ым ниже перемещающего механизма. 6. Устройство, по пп.1-5, о т л и- чающееся тем, что входная станция снабжена приводным механизмом, установленным с возможностью вращения вокруг вертикальной оси входной станции и взаимодействия с
подвесными узлами, расположенными под приводным механизмом, причем направляющие элементы перемещающих механизмов размещены ниже подвесных узлов, а MexaFii 3M управления представляет собой стационарный барабан с распо- лoжeннI,.и но его периферии криволинейными направляющими.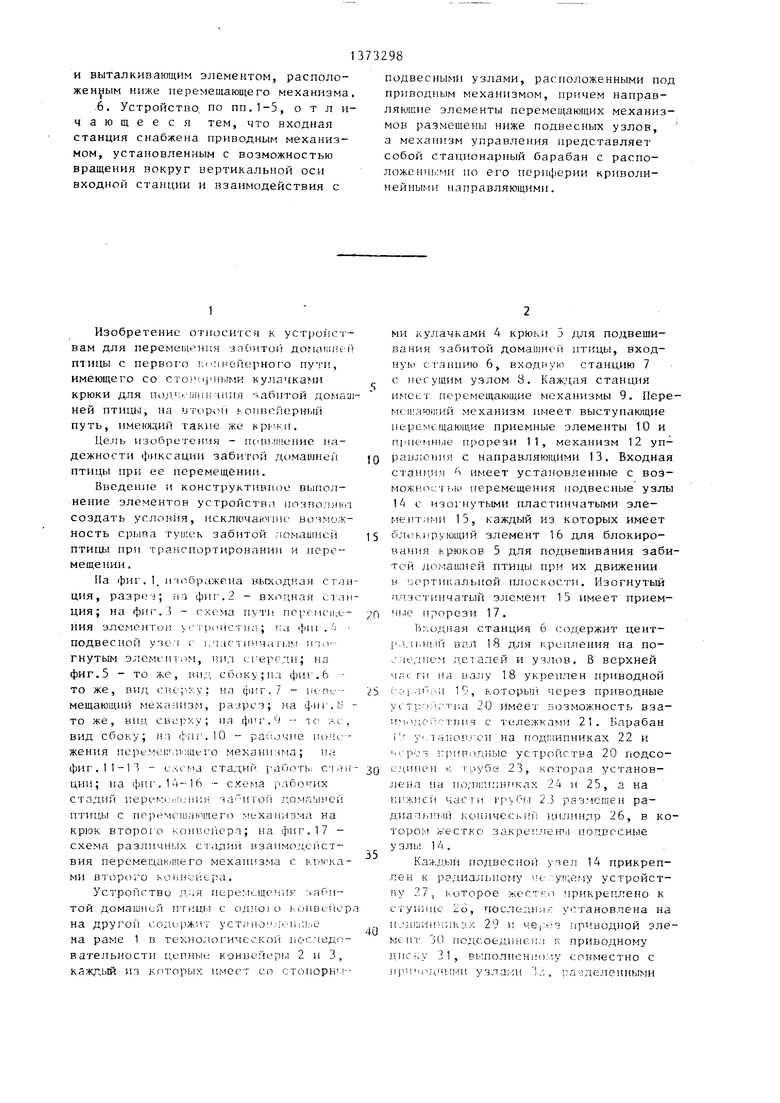


1
Изобретение относится к ycTpoiic i - вам для nepeb eiUi)iHH зпОитон дома)11и 1 птицы с первого г.ннейерного пути, имеющего со CTOinijMiiiiMH кулачками крюки для non,;.. ;ii iii:Uin i забитой до1.1а1и ней птицы, на иторой коивпмерный путь, имеющий такие же .
Цель изобретения - повыи ение надежности фиксации забитой дома1иней птицы npii ее перемещении.
Введение и конструктивное выполнение элементов устройства позпо.чяк.а создать услов11я, исключаю1 ис воямож- ность срыва тушек забитой ломащисй птицы при транспортировании и перемещении .
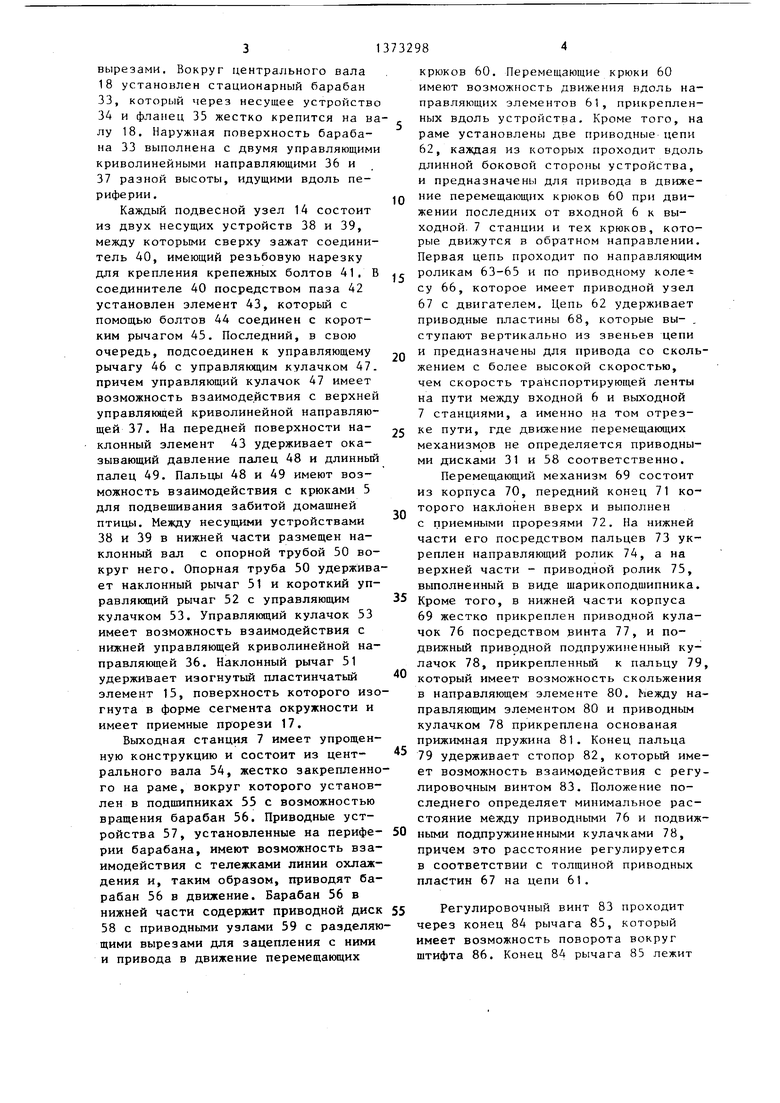
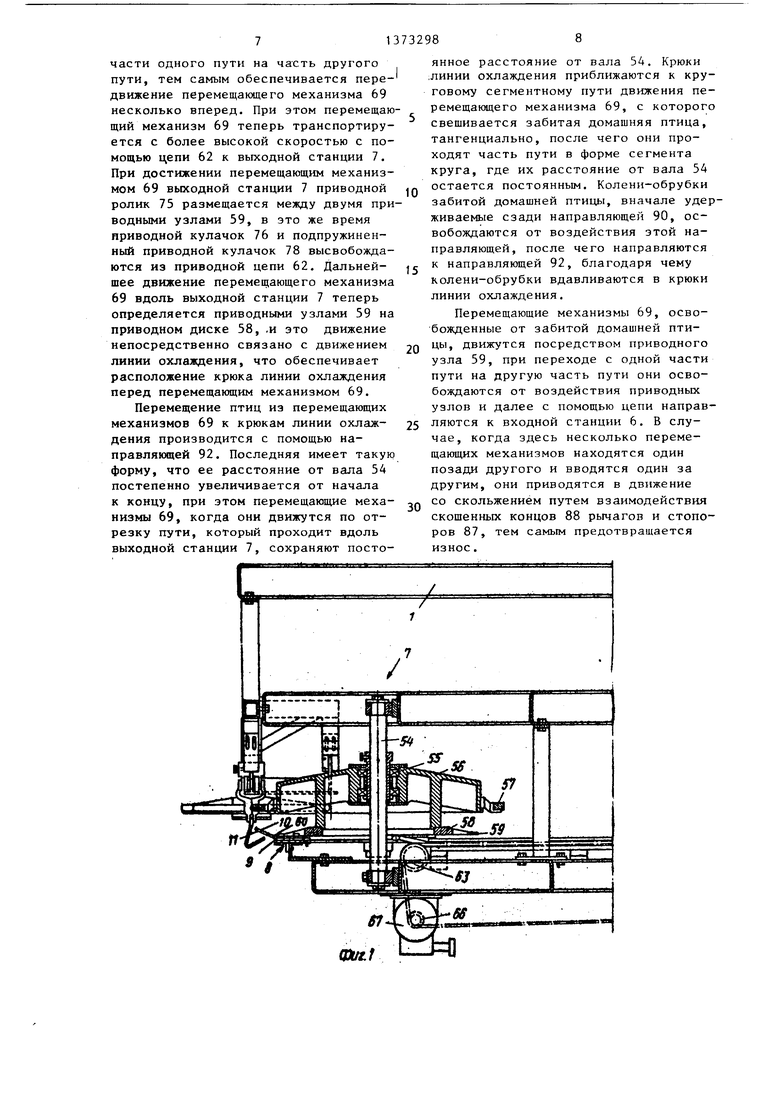
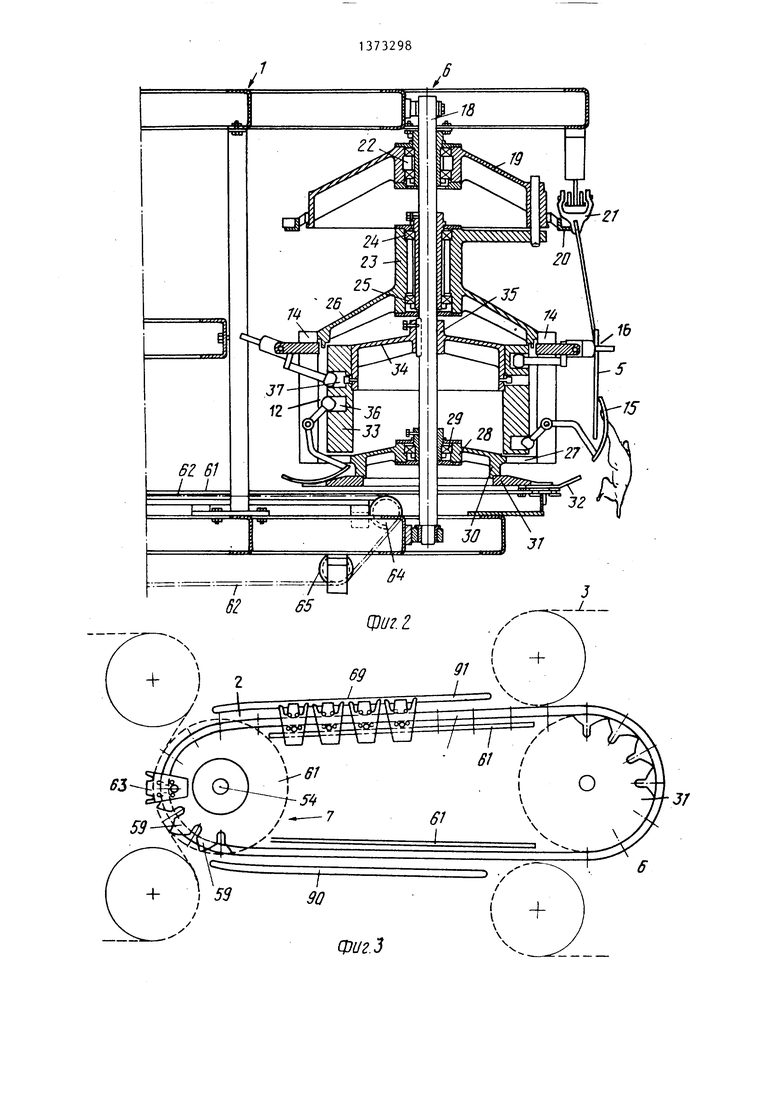
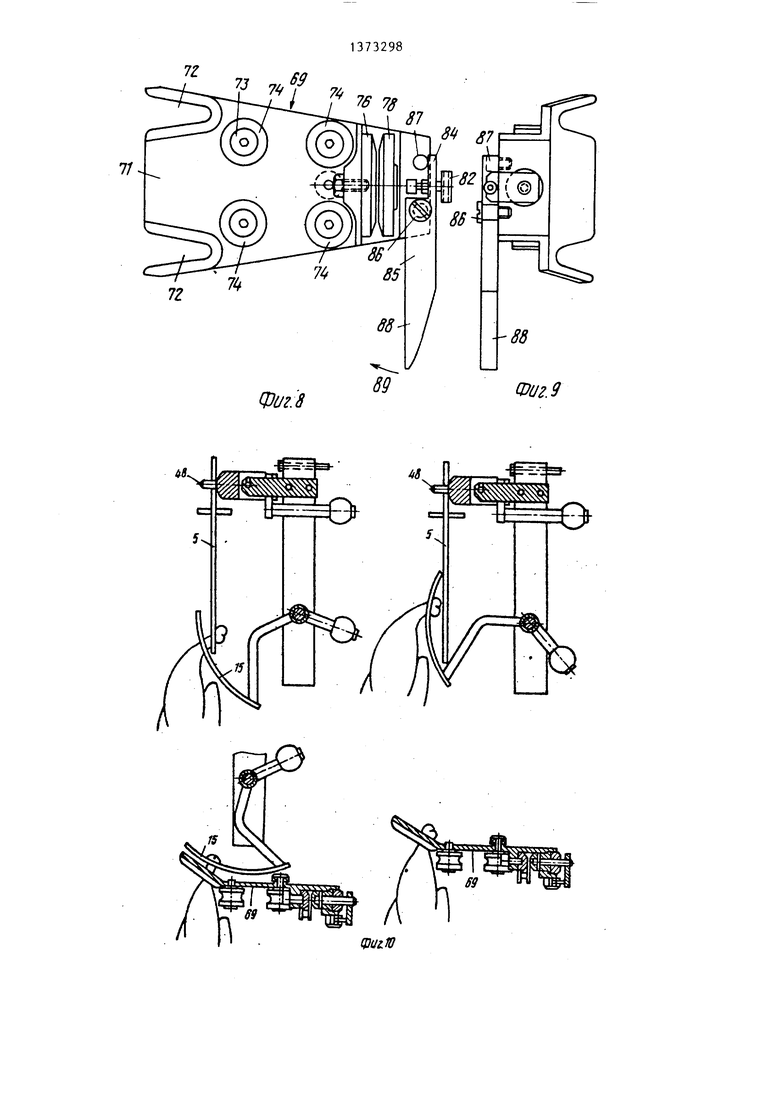
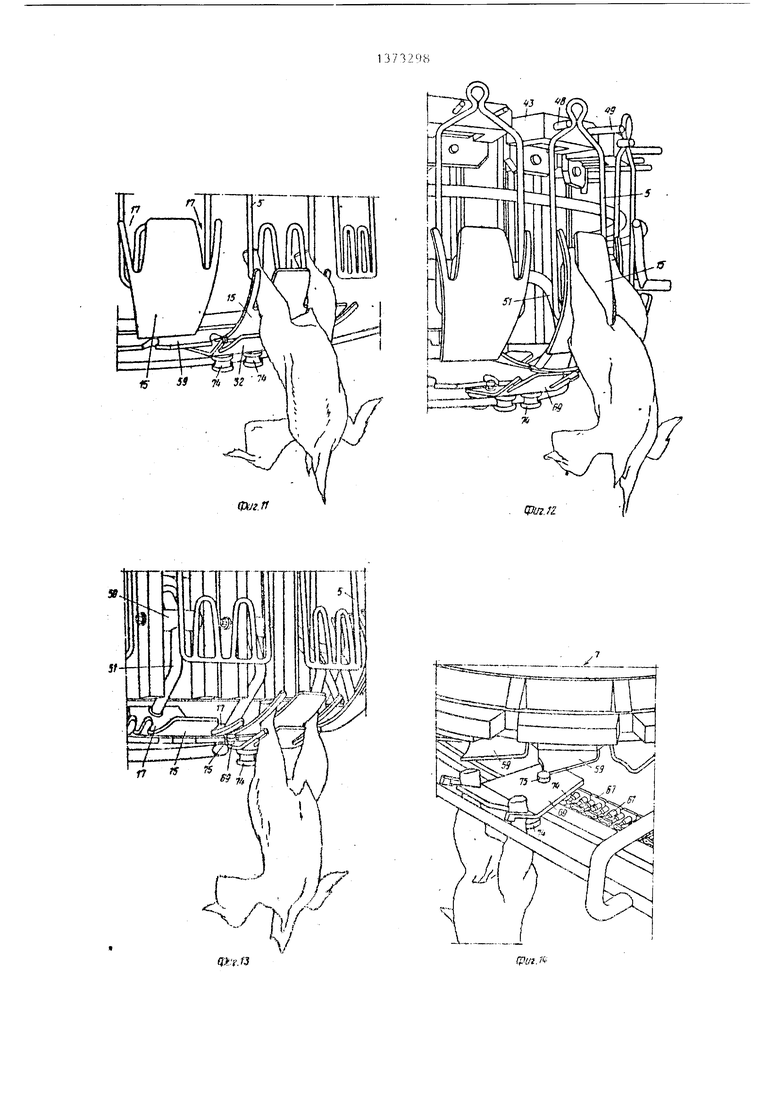
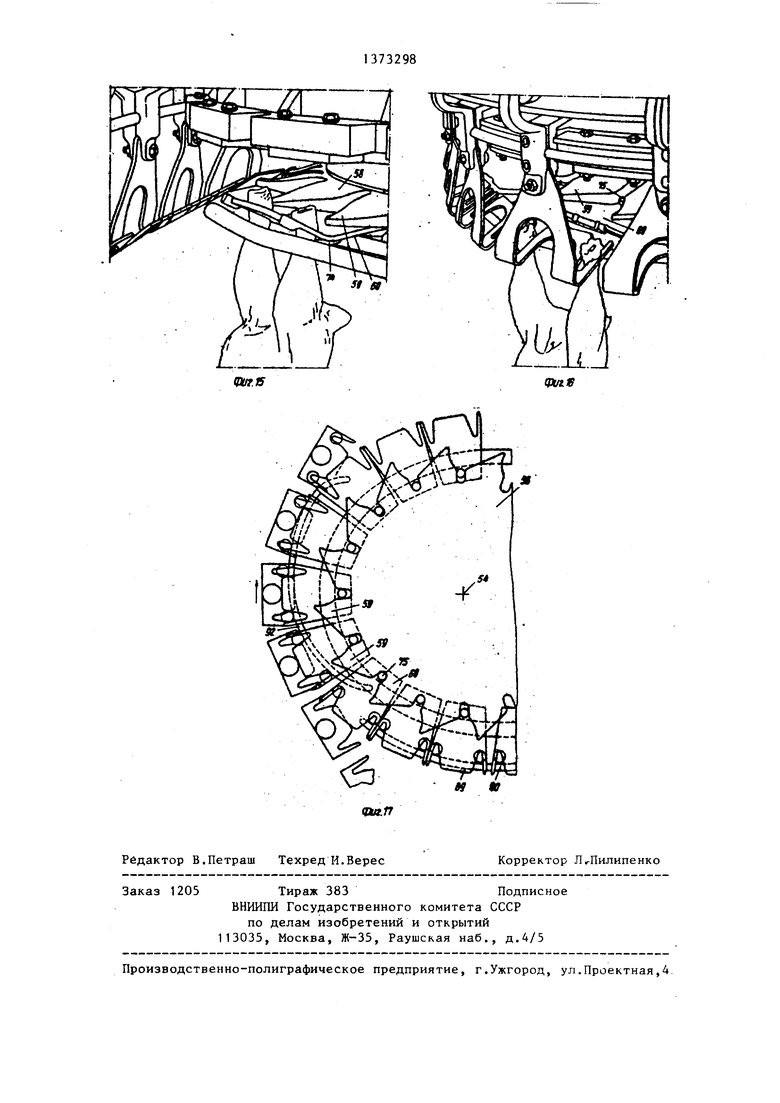
фиг. 1 ичс бражена выходная станция, разрез; на фиг.2 - вхпдна; станция; на фиг.З - схема rryTii ncpfиси е- ния элементси уiri ixufCTiK;; на ijinr. -i - подвесной узе;| г (;11астли -)а П,м ii id- гнутым элeмtмгl;lм, вид сл егс-;1и; на фиг.З - то же, ви;.1, сб()ку;нл фиг.6 - то же, вид спег Ху: на фиг, 7 - кепомещающий механизм, разрез; на то же, вид CBejixy; на фиг. Ч - то ,-.с . вид сбоку; Jsa (Ьиг.10 - жения перем1.-;11М11:ще1 о механизг-ia; ь а фиг. 11-13 - схема стадий {-аОоть станции; на 4)иг.14-1б - схема рабочих стадий iiepeF- .i;((.;iiii { эа И го11 1;ома 11 сй птицы с гюремсмиаюиего механ;-1зма на крюк второго KOHuei icpa; на фиг. 17 - схема различных С садий взаимодействия nepeMBiiuiKjinero механизма с ми второго коинейера.
Устройство Для перемещемир чаГчт- той домашней птицы с о KoiiDeitep
на другой СОД1;11ЖИ Г уСТ;1 iiO: JI ll:Li;ie
на раме 1 в тех}1ологиче;ской нос. вательности цепные конвейеры 2 и 3, каждый из которых имеет со стопорн.-
ми кулачками 4 крюки 5 для подвешивания забитой домашней итицы, входную с:танник1 6, входнун.1 станцию 7 с несущим узлом 8. Каждая станция имек перемещающие механизмы 9. Пере- ь)сп:яю |,ий механизм имеет выступающие неремещающие приемные элементы 10 и П1 И ; мные нрорези 11, механизм 12 уп- paiJJTCHHn с направляющими 13. Входная станцня 6 имеет установленные с возможностью перемещения подвесные узлы 14 с изогнутыми пластинчатыми элеГ- еНТ;)ЧИ
каждый из которых имеет
бл(1кирующий элемент 16 для блокирования крюков 5 для подвешивания забитой домашней птицы при их движении в вертикальной плоскости. Изогнутый Г1лдс 1 инчатый э. 15 имеет прием- Hi.ie нрорези 1 7 .
Входная станция 6 содержит цент- .,1ЬИ1лй вал 18 для ;.ренления на по- опеднем и узлов. В верхней ч;-1,ги на валу 18 укреплен приводной гяг., 19, которьиЧ через нриводные уcTpri. K Ti .a 20 имеет возможность вза- им 1, с тележками 21. Барабан i У:/ anoBj CH на подшипниках 22 и /роз гриводные устройства 20 подсо- сдинел к. 1 рубе 23, которая установлена на подшипниках 24 и 25, а на части 1 русы 23 размешен ра- диа и ный 1;оничес1-.1) ; цилиндр 26, в котором жестко закреплены подвесные у зль; 14.
Каждый подвесно узел 14 прикреплен к радиальному не. устройству 27; которое жест ко прикреплено к Ступине 2о, после;и1;1/т установлена на ноД 1 ИН ;иках 29 и 4ej:i::-3 прчводной эле- Mi Hi i 30 нодс.оединена к приводному дне;,у 31, вь полнсн1 о:1у совместно с iipM icui.MbiNiu узлами ..., рачделе ными
вырезами. Вокруг центрального вала 18 установлен стационарный барабан 33, который через несущее устройство 34 и фланец 35 жестко крепится на валу 18. Наружная поверхность барабана 33 выполнена с двумя управляющими криволинейными направляющими 36 и
37разной высоты, идущими вдоль периферии .
Каждый подвесной узел 14 состоит из двух несущих устройств 38 и 39, между которыми сверху зажат соединитель 40, имеющий резьбовую нарезку для крепления крепежных болтов 41, В соединителе 40 посредством паза 42 установлен элемент 43, который с помощью болтов 44 соединен с коротким рычагом 45. Последний, в свою очередь, подсоединен к управляющему рычагу 46 с управляющим кулачком 47. причем управляющий кулачок 47 имеет возможность взаимодействия с верхней управляющей криволинейной направляющей 37. На передней поверхности наклонный элемент 43 удерживает оказывающий давление палец 48 и длинный палец 49. Пальцы 48 и 49 имеют возможность взаимодействия с крюками 5 для подвешивания забитой домашней птицы. Между несущими устройствами
38и 39 в нижней части размещен наклонный вал с опорной трубой 50 вокруг него. Опорная труба 50 удерживает наклонный рычаг 51 и короткий управляющий рычаг 52 с управляющим кулачком 53. Управляющий кулачок 53 имеет возможность взаимодействия с нижней управляющей криволинейной направляющей 36. Наклонный рычаг 51 удерживает изогнутый пластинчатый элемент 15, поверхность которого изогнута в форме сегмента окружности и имеет приемные прорези 17.
Выходная станция 7 имеет упрощенную конструкцию и состоит из центрального вала 54, жестко закрепленного на раме, вокруг которого установлен в подшипниках 55 с возможностью вращения барабан 56. Приводные устройства 57, установленные на периферии барабана, имеют возможность взаимодействия с тележками линии охлаждения и, таким образом, приводят барабан 56 в движение. Барабан 56 в нижней части содержит приводной диск 58 с приводными узлами 59 с разделяющими вырезами для зацепления с ними и привода в движение перемещающих
5
0
крюков 60. Перемещающие крюки 60 имеют возможность движения вдоль направляющих элементов 61, прикреплен- ных вдоль устройства. Кроме того, на раме установлены две приводные цепи 62, каждая из которых проходит вдоль длинной боковой стороны устройства, и предназначены для привода в движеQ ние перемещающих крюков 60 при движении последних от входной 6 к выходной. 7 станции и тех крюков, которые движутся в обратном направлении. Первая цепь проходит по направляющим роликам 63-65 и по приводному колене су 66, которое имеет приводной узел 67 с двигателем. Цепь 62 удерживает приводные пластины 68, которые вы- . ступают вертикально из звеньев цепи и предназначены для привода со скольжением с более высокой скоростью, чем скорость транспортирующей ленты на пути между входной 6 и выходной 7 станциями, а именно на том отрез5 ке пути, где движение перемещающих механизмов не определяется приводными дисками 31 и 58 соответственно.
Перемещающий механизм 69 состоит из корпуса 70, передний конец 71 которого наклонен вверх и выполнен с приемными прорезями 72. На нижней части его посредством пальцев 73 укреплен направляющий ролик 74, а на верхней части - приводной ролик 75, выполненный в виде шарикоподшипника. Кроме того, в нижней части корпуса 69 жестко прикреплен приводной кулачок 76 посредством ринта 77, и подвижный приводной подпружиненный кулачок 78, прикрепленный к пальцу 79, который имеет возможность скольжения в направляющем элементе 80. Между направляющим элементом 80 и приводным кулачком 78 прикреплена основаная прижимная пружина 81. Конец пальца 79 удерживает стопор 82, который имеет возможность взаимодействия с регулировочным винтом 83. Положение последнего определяет минимальное расстояние между приводными 76 и подвиж0 ными подпружиненными кулачками 78, причем это расстояние регулируется в соответствии с толщиной приводных пластин 67 на цепи 61.
5 Регулировочный винт 83 проходит через конец 84 рычага 85, который имеет возможность поворота вокруг штифта 86. Конец 84 рычага 85 лежит
0
5
0
5
на стопоре 87. Другой, скошенный, конец 88 рычага 85 имеет возможность поворота в направлении стрелки 89. Приводной подпружиненный кулачок 78 перемещается посредством регулировочного винта 83, стопора 82 и пальца 79 от жестко закрепленного приводного Кулачка 76 так, что приводные устройства освобождаются от приводных пластин 68 на приводной цепи. Скошенный конец 88 рычага 85 следующего в направлении движения перемещающего механизма подходит к пальцу предшест вующего узла, тем самым скошенный конец 88 совершает качательное движение в направлении стрелки 89, Приводные кулачки 76 и 78 рассматриваемого крюка перемещаются друг от друга, а перемещающий механизм приводится в движение лишь со скольжением или не приводится в движение цепью 61.
Непрерывные направляющие элементы для перемещающих механизмов 69 имеют между входной 6 и выходной 7 станциями прямолинейный участок, вдоль которого перемещающие механизмы 69 имеют возможность двигаться с помощью цепи с более высокой скоростью.
Перед входной станцией 6 расположен
криволинейный отрезок направляющей, вдоль которого перемещающие механизмы 69 имеют возможность двигаться с помощью приводных узлов 32 указанной станции, при этом их движение синхронизировано с движением подвесных уз- лов 14. У выходной станции 7 расположен другой криволинейный участок направляющей, и при движении вдоль его перемещающие механизмы 69 посредством приводных узлов 59 имеют возможность двигаться синхронизирован- но с движением выходной станции 7 и линии замораживания. Вдоль прямых отрезков пути расположены жестко закрепленные направляющие 90 и 91, концы которых расположены у выходной станции 7 и скруглены, причем у выходной станции 7 расположена специальная вькодная направляющая 92 для выдавливания ног забитой домашней птицы из перемещающих механизмов на крюки охлаждения.
Устройство работает следующим об- ,разом.
Схема перемещения забитой домашней птицы, доставки на линию потрошения с крюков 5 и перемещающему механизму 69 дана на фиг.10. В переме
0
5
0
5
щающем механизме 69 при движении и приближении к подвесному узлу 14 в пространстве между двумя соседними приводными узлами 32 перемещается приводной ролик 75. Поскольку движение диска 31 с приводными узлами 32 связано с перемещением и с движением подвесных узлов 14, то всегда соблюдается согласованность между крюком 5 линии потрошения, который удерживает забитую птицу, каждым конкретным подвесным узлом 14 и перемещающим механизмом 69. Эти три элемента совместно движутся через подвесной узел 14; крюк 5 жестко защемлен с помощью пальцев 48 и 49, а перемещающий механизм 69 движется с помощью приводных узлов 32. Движение различных элементов свешивающего узла контролируется управляющими криволинейными направляющими 36 и 37 в стационарном барабане 33.
Криволинейные направляющие выполнены так, что в течение наиболь- шей части движения создающие давление пальцы 48 и 49 удерживают крюк 5 прижатым, таким образом,его движение по вертикали невозможно. Направление управляющей криволинейной направляющей 36 таково, что, как только крюк 5, подвесной узел 14 и свешивающийся крюк располагаются друг относительно друга, а изогнутый пластинчатый элемент 15 совершает движение качания из самого нижнего положения и вдоль низа крюка 5, забитая птица отклоняется с крюка и висит коленями-обрубками в вырезах 17. Когда крюк 5, подвесной узел 14 и перемещающий механизм 69 движутся далее вдоль входной станции 6 и подвесной узел 14 начинает двигаться обратно, то забитая домашняя птица перемещается в приемные прорези пере- мещающего механизма 69. При дальнейшем перемещении изогнутого пластинчатого элемента 15 перемещающий механизм также перемещается на правостороннюю часть пути между входной 6 и выходной 7 станциями, при этом подвесной узел 14 и перемещающий механизм 69 движутся так, что забитая домашняя птица безопасно перемещается в перемещающий механизм 69.
Этому перемещению дополнительно может способствовать некоторое перемещение направляющего элемента к внешней стороне в месте перехода с
0
0
5
части одного пути на часть другого пути, тем самым обеспечивается передвижение перемещающего механизма 69 несколько вперед. При этом перемещающий механизм 69 теперь транспортируется с более высокой скоростью с помощью цепи 62 к выходной станции 7. При достижении перемещающим механизмом 69 выходной станции 7 приводной ролик 75 размещается между двумя приводными узлами 59, в это же время приводной кулачок 76 и подпружиненный приводной кулачок 78 высвобождаются из приводной цепи 62. Дальнейшее движение перемещающего механизма 69 вдоль выходной станции 7 теперь определяется приводными узлами 59 на приводном диске 58, ,и это движение непосредственно связано с движением линии охлаждения, что обеспечивает расположение крюка линии охлаждения перед перемещающим механизмом 69.
Перемещение птиц из перемещающих механизмов 69 к крюкам линии охлаждения производится с помощью направляющей 92. Последняя имеет такую форму, что ее расстояние от вала 54 постепенно увеличивается от начала к концу, при этом перемещающие механизмы 69, когда они движутся по отрезку пути, который проходит вдоль выходной станции 7, сохраняют посто
янное расстояние от вала 54, Крюки ;линии охлаждения приближаются к круговому сегментному пути движения перемещающего механизма 69, с которого свещивается забитая домашняя птица, тангенциально, после чего они проходят часть пути в форме сегмента круга, где их расстояние от вала 54 остается постоянным, Коленн-обрубки забитой домашней птицы, вначале удерживаемые сзади направляющей 90, освобождаются от воздействия этой направляющей, после чего направляются C к направляющей 92, благодаря чему колени-обрубки вдавливаются в крюки линии охлаждения.
Перемещающие механизмы 69, освобожденные от забитой домашней птицы, движутся посредством приводного узла 59, при переходе с одной части пути на другую часть пути они освобождаются от воздействия приводных узлов и далее с помощью цепи направляются к входной станции 6, В случае, когда здесь несколько перемещающих механизмов находятся один позади другого и вводятся один за другим, они приводятся в движение со скольжением путем взаимодействия скошенных концов 88 рычагов и стопоров 87, тем самым предотвращается износ.
0
5
0
Z1
Л,
R
«J
Фиг.
43
8
44 f/ f
Ф1/г.5
Ф1/г.7
73
П
Фш.з
Фиг.9
ШтЮ
Фаг.П
5f
П
Qb-.J
Фш.к
Фит.к
Редактор В.Петраш Техред И.Верес
Заказ 1205 Тираж 383Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
cpvtf
Корректор Л Пилипенко
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
