СО
со
ел ГчЭ
01
И:и)бретение относится к устройствам для длинномерных цилиндрических деталей в рабочую зону обрабатывающих машин и может быть испо.чьзовано в авто- ма ически линиях комплексной обработки труб,
Пель изобретения Г1овыи1ение надежности работы устройства за счет обеспечения загрузки и ньи рузки длинномерных ни- л и 1-д р: г; еч к и и з дел и и.
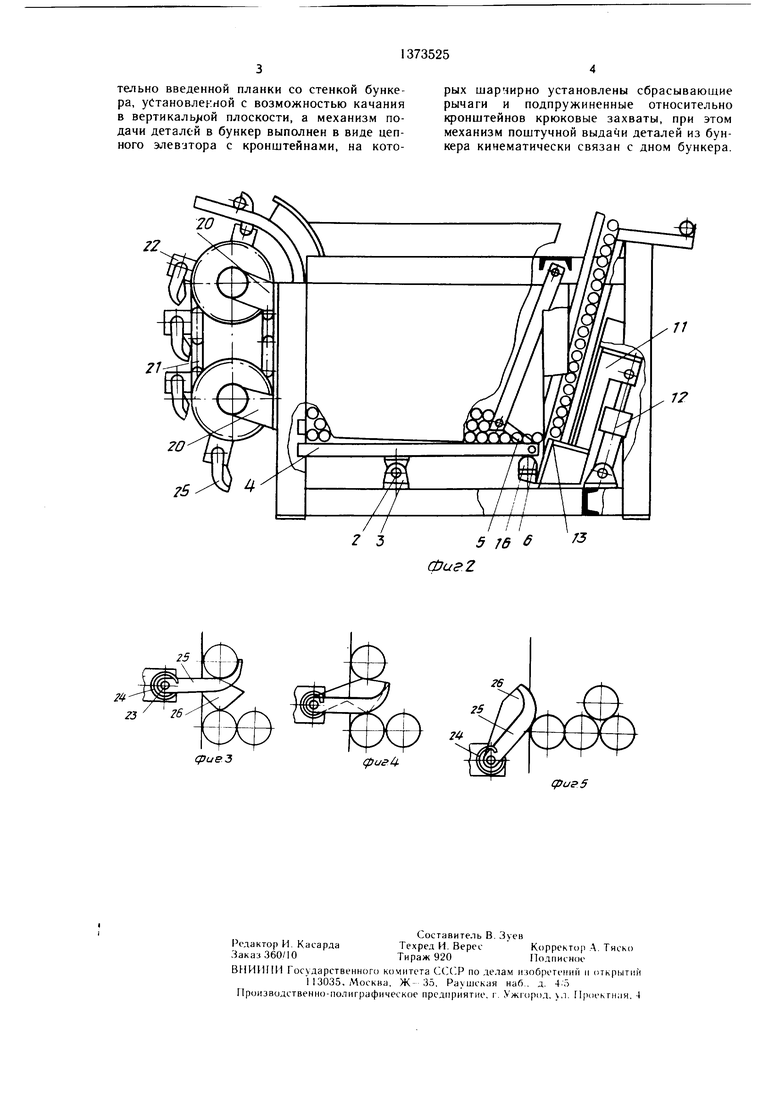
Fla ( 1 изг1б)ажено устройство в ис- чидиом |1ол(;. 1ч( 1,и;| перед поштучной выдачей 1 руо ;м бункера, общий вид; на фги 2 то же, в положении 1К;;птучной выдачи и ориентации труб: на (()иг, , 5 па южения KJHOKOBOTO захвата и сбрасываю- inei o jjbiiiai .j механизма подачи дета.лей в бункер.
Vcт)oйcтвo состоит из рамы-бункера 1, на кроппп ейнах 2 которой посредством (к ей 3 пг)ворогпо установлено дпо 4, niap- пп)по снязапное планкой 5 посредством осей 1 и 7 с иижн1:М концом стенки бункера 8. верхнп) копец которой также пшрнирно пос(. Д1 твом 1-)си 9 с(}единеи с рамой. За стенкой бункепл 8 па ра.ме смопти)овапы ,чак. 1онп1,1е )).1яюп1ие К), в которых с возм )(.) возвратно-нос уу пате,. ьпого движения yc i uiOB;ieH П1иберный гштатель в виде ползупа 11, приьодимог-о в действие от си,човпго ци,ти1 дра 12. Нижняя часть ползуна вьпю.чнена в виде выступа 13, посредством которой) при ПОШТУЧНОЙ выдаче тру- переметаН)-1ся вверх по пазу, образованному nai jian.JMKJiiiHMH 14. В нижней час- (и направляющих 14, в зоне выхода труб из бункера смоп ировап отсекате, 15. а на но. И упг)р. И), пе иодпчески (при холе 11) вве)) контактп 1 опип 1 с 4.
, . стороны рамы-бункера 1, про- 1 инопо.южной установке механизма г ыдачи деталей из бункера, смонтирован механизм 17 подачи деталей в бункер, со.к пж; ninit звездочки 18, жестко смслтти- ( ,м;п.1 на 1-::|Л. ;х 19, закреп.пенных ;( опорах 20 рамы. ; )ездочки попарно связаны Ш НИ .ги 2. п;-: зщ ньях которых с щатом, к 5 1тпым :нату пени, жестко закреплены крон- :П1еЙ1 ы 22, 1.егуп1ие пси 23, па которых повороии) установлены подпружиненные относи е.1ьно кронп1тейнов пружинами 24 кручения крюковые .захваты 25 и неподпружи- пеп1п,1е, с 1ободно установленные сбрасывак щие )ычаги 26.
Т)убные заготовки 27 поступают к .ме- хапи.зу 17 по направляющему желобу 28 от conpji. женног(.) с накопительно-загрузочным ycipoi TBoM участка обработки труб автоматической ,типии.
(я(ство работает следующим образом.
Т)убная заготовка 27 поступает в на- п)авляюпи1Й желоб 28 и скатывается по 1ем па кркжоЕюй захват 25. По мере накопления труб в крюковых захватах последние TLiaBHO опускаются до контакта сбрасываемых рычагов 26 с трубами, находящимися в бункере (фиг. 3), или с дном 4 (если трубы только начали заполнять бункер). При дальнейшем движении крюковых захватов 25 вниз сбрасывающие рычаги 26, упираясь в трубь, поворачиваются относительно осей 23. При чтом очередная труба скатывается с наклонной кромки сбрасывающего
0 рглчага в бункер (фиг. 4), а сопряженный . viMM сбрас1)1ва()щи м рыча1 ом (па одной оси 23) )ковой захв.:гт, угифаясь в трубы, находящиеся в бупке)е. и.1и в д.по 4, нреодо- .1евает усилие пружипы 24, поворачивается
с относительно крон1птейна 22 и продолжает свободное движение совместно с цепью 21 (фиг. 5).
Таким образо.м, ii|)n псреме цепии крюкового захвата 25 с трубой вниз следующий крюковой захват (без трубы) входит в
0 3Oiiy прие.ма очередной трубы из направляющего лотка и пружиной 24 устанавливается в рабочее пол(.1же11пр (фиг. 1).
Л,1Я поштучной выдачи труб из бункера на последующую ()брабо ку включением силово о пилинд)а 12 на п палкивапие цттока по. гзуп 11 (щиоерщ.ш П1 татель) пе- ремс:пают |шерх п.:; inai. задап ЫЙ диамет- I10M , по пачравляклцим 10. При этом трубы, находяш.иеся в пазу, образо- ванпом направляющими 14, приподнимаются
4 гюд воз.тействием Bi.icTyn;; 13 ползуна таким обра.зом, что o. uia отде.пяется д.1я передачи па дальнейшую обработку (фиг. 2). В .момент отсекате.чь 15 удерживает весь набор труб, препятствуя их самопроизвольному опусканию при возврате ползуна 11 в исходпое положение при .)бпатном ходе п.пли;;дра 12 на втягивание шгока. В конце рабочего хг)да ползуна И вверх упор 16 воздействует на дпо 4 бунке})а, поворачивая его вокруг осей 3 на небольшой угол относительно ра.мы. При
0 этом ;iHo 4 посредством плапки 5 и осей 6 и 7 г.оздействует на о пкера 8. повора- ее вокру1 оси 9 относительно рамы, в fx зyльтaтe чего оеун1ествляется ориентация труб (нараллельное выравнивание труб) перед их входом в паз, образуемый направ- .1ЯЮШИМИ 14, и разрушени свод.а из труб в c. iynae его образовапия от давления верхних труб на (1ижние полной загрузке бункера.
5
5
5
50
Форм у.ш и :ioupe гения
Загрузочно-)азгрузочное устройство, со- держан1ее механизм подачи деталей в бункер и меха1 изм поп1тучной выдачи деталей из бункера, отличающееся те.м, что, с це.чью повы1пения надежности paOoTi i, дно бункера В1)|по. 1пепо с воз.можнсх тыо качания в вертикальной плоскости, одна сторона которо- то щарпирпо связана посредством дополнительно введенной планки со стенкой бункера, уСтановлекной с возможностью качания в вертикаль ой плоскости, а механизм подачи деталей в бункер выполнен в виде цепного элеватора с кронштейнами, на которых шарчирно установлены сбрасывающие рычаги и подпружиненные относительно фонштейнов крюковые захваты, при этом механизм поштучной выдачи деталей из бункера кинематически связан с дном бункера.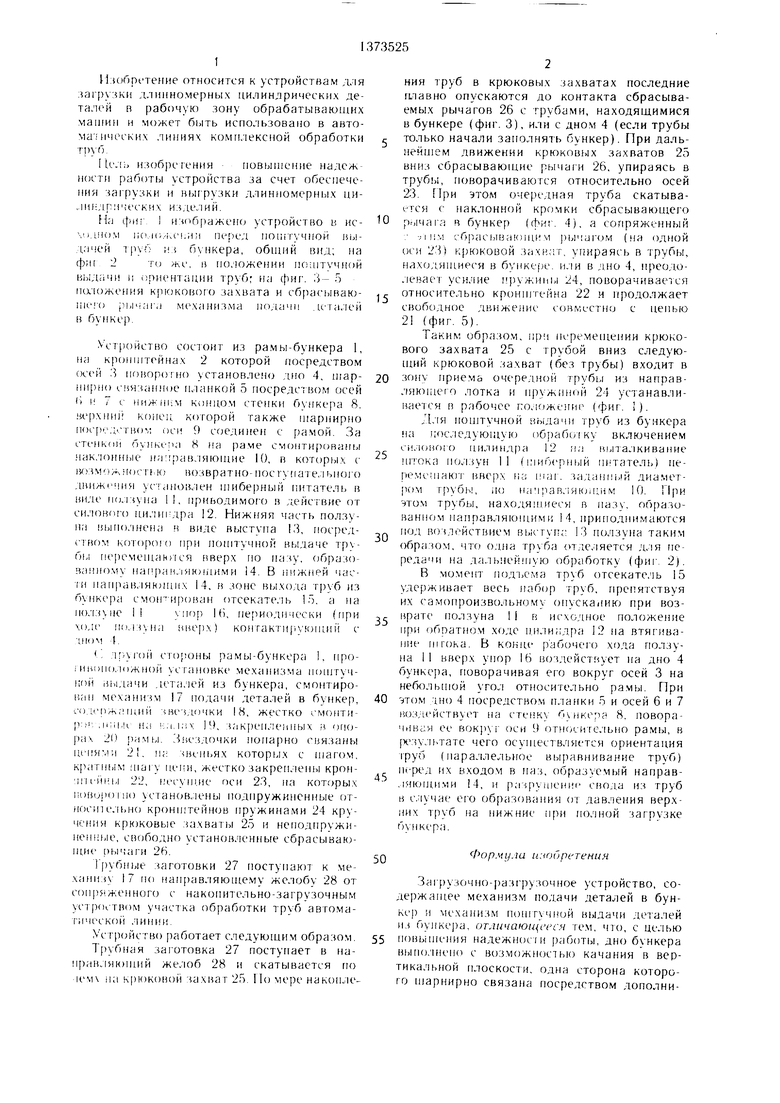
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1530407A1 |
| Линия для разбраковки длинномерных трубок | 1982 |
|
SU1117088A1 |
| Кассетная установка для формования изделий из бетонных смесей | 1985 |
|
SU1530464A1 |
| Загрузочное устройство | 1991 |
|
SU1821332A1 |
| Элеваторное бункерное загрузочное устройство | 1980 |
|
SU874307A1 |
| Механизм поштучной выдачи заготовок | 1972 |
|
SU442874A1 |
| Устройство поштучного взвешивания длинномерных изделий | 2016 |
|
RU2629692C1 |
| Устройство для разбора пакета длинномерных изделий и поштучной их выдачи | 1985 |
|
SU1386537A1 |
| УСТРОЙСТВО для ПОи]ТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1965 |
|
SU169981A1 |
| Устройство для разборки пакета цилиндрического проката | 1990 |
|
SU1766801A1 |
Изобретение относится к устройствам для загрузки длинномерных деталей в рабочую зону обрабатываюши.х машин и может найти применение в автоматических линиях комплексной обработки труб. 11е;1ью изобретения является создание загр уЗочно-)а:( грузочного устройства для поштучной выдачи длинномерных цилиндрических деталей в зону обработки с предварительным автоматическим накоплением изделий в бункере устройства по заданной 1рог|и:мме, об.);)- дающего высокой производпте.тьностьк) и надежностью в работе. Для :)того детали 27 с Г1омони ю механизма пода -: детале и кер, Е ыполнснного н lui/u- iieiiiioro . icH.i- гора. подаются в устро1кд-ва ;i нри взаимодействии c6|5acbiBaKiU oro |) 26 с дном 4 и;|и другой дета.тью. находящейся ,ч дне. скатываются в 6yiiKep. Л,1Я .чой выдачи деталей, ич 6yiiKe|ia ползун 1 no.i действием силового иилиидр . 12 пеое- мешается на один шаг, ра шый иаметр .уталп, и одна труба подается и зону обработки. В конце рабочего хода по. упор 16 воздействует на дно бункера 4, по лп- рачивая его вокруг оси ,3, при VTOM дно бункера, посредством мапки 5 шарни|1но связанное с качающейся сгснкой «, npniio- дит последнюю в движепнс- К рез.1ьгате осу шествляется ориентация T|iy6 перед входом на ползун 1 1 и разрушение сводм. FI)H обратном ходе ползун;; II сто, 1б деталей удерживается отсека le,ем i Г) г, и,| ч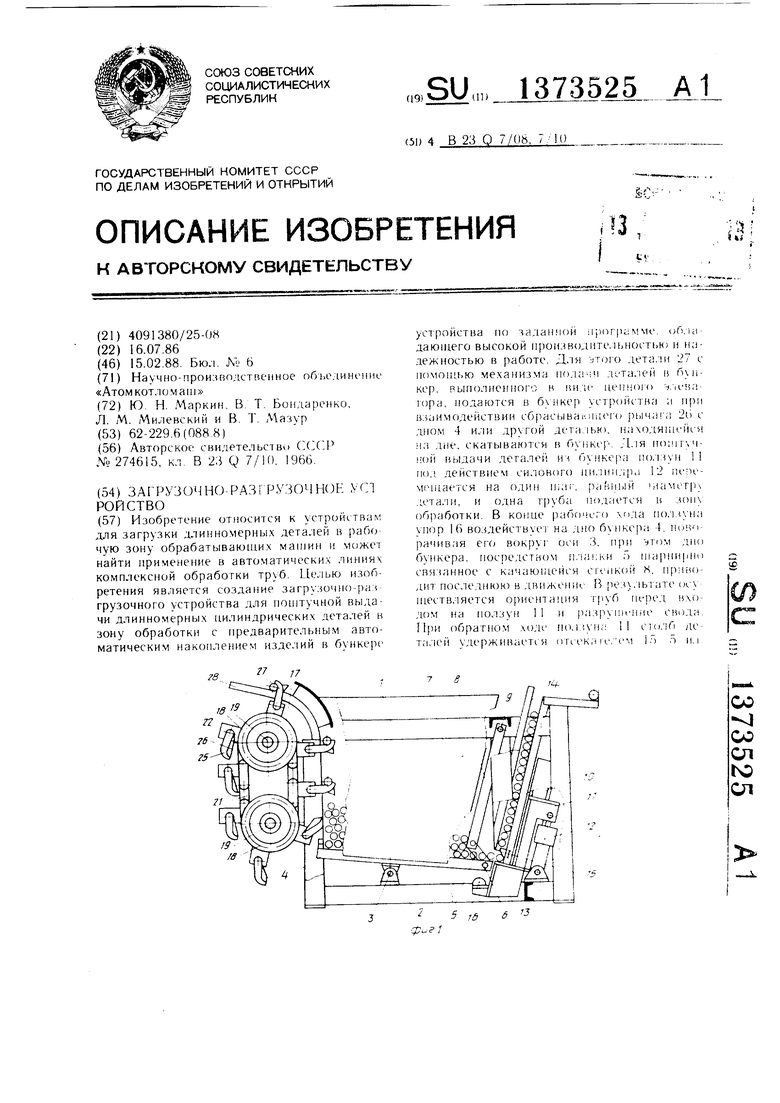
(риеЭ
1
(ригЛ
фиг 5
| 0 |
|
SU274615A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
