1
Изобретение относится к машиностроению, в частности к конструкциям промышленных роботов, и может быть использовано при оонащении технологического оборудования средствами автоматической загрузки и выгрузки ваделий.
Известны захваты промьштенных роботов, содержащие захватные рычаги с выполненнььми за одно целое с ними губками tlj
Недостатком этих захватов является жесткая фиксация зажатого изделия относительно кисти робота.
Известен также захват, содержащий связанные с кистью робота захватные рычаги с подвижно закрепленными на них губками 2.
Недостатком этого захвата является не возможность самоустановки изделия по захватному органу технологического оборудования при несовпадении направления движения изделия с направлением базовой поверхности згисватного органа, например цанги, что сужает функциональные возможности описанных захватов.
Цель изобретения - расширение функционапьлых возможностей захвата, облегчак щее, в частности, его использование на роботах с криволинейной траекторией движени изделия, например |на роботах, работающих в цилиндрической и сферической системах координат.
Это достигается за счет того, что на захватных рычагах предлагаемого захвата выполнены йродольныё направляющие пазы, в которых установлеиь , подпружиненные ползуны с закрепленными на них осями, а губки установлены на этих осях с возможноотью вращения и подпружинены относительно ползунов.
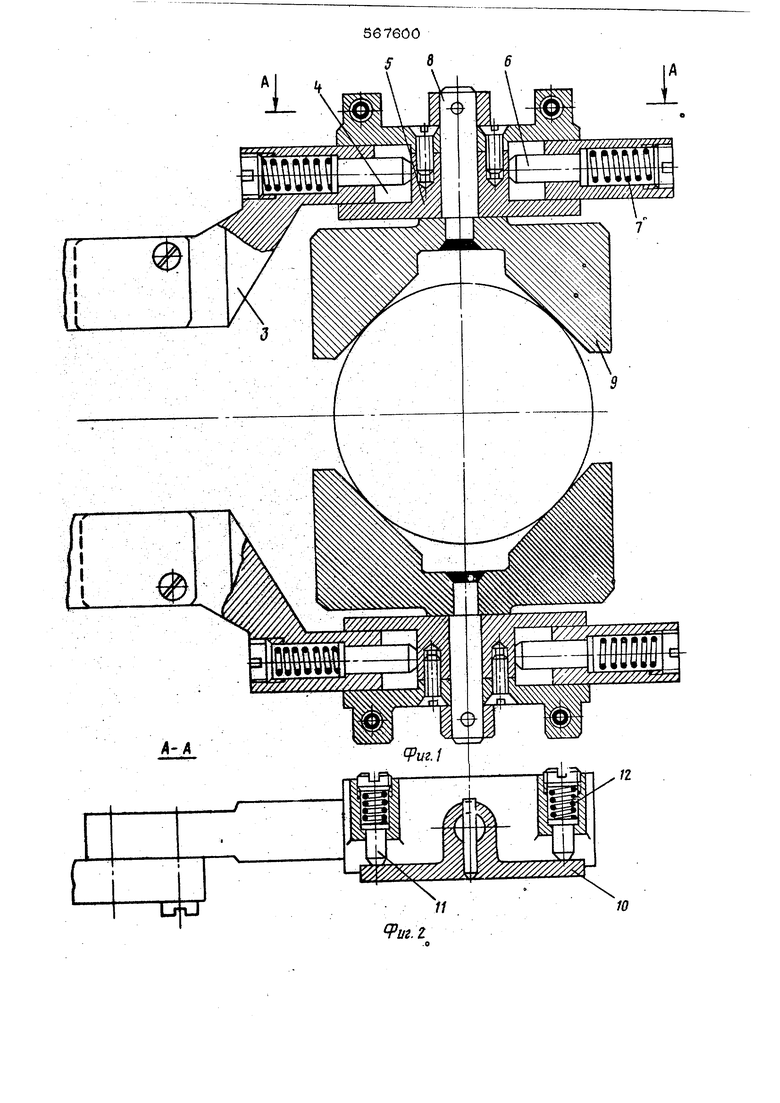
На фиг. 1 изображен предлагаемый зэхват промышлпшого робота, охций виД; на1 фиг. 2 - разрез А-А фиг. фиг. 3 робот с описываемым захватом, пример выполнения} на фиг. 4 - вид Б фиг. 3.
Захват промышленного робота 1 содерн жит два закрепленных на кисти 2 робота захватных рычага 3. На них выполнены продольные направляющие пазы 4, в которых установлен ползуны 5, взаимодейст вующие через толкатели 6 с пружинами 7, закрепленными на рычагах 3 и удерживаяУ
щими ползуны 5 в среднем положении. В ползунах 5 усганЬвпены с возможностью вращения оси 8 губок 9. С осями 8 жестко связаны Двуплечие рычаги 10, взаимодейст вующие через толкатели 11 с пружинами
12, закрепленными на ползунах 5 и удерживающими губки 9 в среднем положении. Захват работает следующим образом.
При загрузке изделия в захватиый ортан технологического оборудования (на чертежах не показан), например в цангу, кисть 2 робота 1 с зажатым в захвате изделием (не показано), совершает движение,по криволинейной, в част :ости дуговой, траектории. При этом изделие входит в соприкосновение с базовыми воверхностямя захвагного органа и npi дальнейшем движении киоти 2 самоустанавлнвается по этим базовым поверхностям за счет поворота губок 9 и смещения ползунов 5. При освобождении изделия из захвата губки 9 и ползуны 5 под
действием пружин 12 и
7 возвращаются в среднее положение.
Формула изобретения
Захват промыишенного робота, содержащий связанные с кистью робота захватные (я 1чаги с подвижно закрепленными на них гулами, отличающийся тем, что, с целью расширения функциональных возможностей, на захватных рычагах выполнены продольные направляющие пазы, в которых установлены подпружиненные ползуны с закрепленными на них осями, а губки установлены на этих осях с возможнсютью вращения и подпружинены относительно ползунов.
Источники информации, принятые, во внимание при экспертизе:
1. свидетельство СССР № 417273, кп. В 25 J 15/ОО, 1972.
2.Авторское свидетепьство СССР № 316517, кл. В 21 J 13/ОО, 1969.
9иг: г
,N7,H
//////////////////////////////////////////////////////////////////////1 /////
Н)$7
Риг. 3

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Захват манипулятора | 1987 |
|
SU1511117A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1986 |
|
SU1449340A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |

Вид б
. 4
