(21)4091621/27-03
(22)28.05.86
(46) 15.02.88. Бюл. № 6
(71)Специальное конструкторско-тех- нологическое бюро Элеватормельмаш
(72)В.П.Кулиш, В.К.Остапенко, В.В.Харчук и Ф.Г.Яремчук
(53)621.867(088.8)
(56)Авторское свидетельство СССР № 876364, кл. В 23 Q 7/02, 1980.
Рабинович А.Н. Автоматическое ориентирование и загрузка. - К: Техника. 1968. с. 97-99, рис. 50 г.
(54)МЕХАНИЗМ ОРИЕНТАЦИИ ДЕТАЛЕЙ
(57)Изобретение относится к устр-вам автоматической ориентации длинномерных профилей типа швеллер (Ш) полками вверх для их последующей обработки и м.б. использовано в машиностроении. Цель изобретения - повышение , надежности ориентации деталей типа Ш,
Под подающим конвейером (К) 1 с толкателем 2 для перемещения Ш установлена опорная направляющая (Н) 3. Выходной конец последней обращен в сторону отводящего К 5, выполнен со скосом и образуе- с Н 3 острый угол. На расстоянии от выходного конца Н 3 установлен упор 4 с наклонной в сторону Н 3 поверхностью, выполненной плоской или криволинейной. При этом К 5 установлен под проемом, образованным между упором 4 и Н 3. Толкателем 2 Ш подается к выходному концу Н 3, например, полками вниз. Передняя полка достигает конца Н 3, проваливается в зазор между концом Н 3 и упором 4, опираясь на стенку и заднюю полку. По достижении центром тяжести Ш конца Н 3 он падает на К 5 с разворотом, ориентируясь полками вверх. 2 з.п. ф-лы, 2 ил. /
(Л
оо
оо
Од 4 СП
puf.f
Изобретение относится к устройствам автоматической ориентации длинномерных профилей типа швеллер полками вверх для их последующей обработки и может быть использовано в машиностроении.
Цель изобретения - повышение надежности ориентации деталей типа швеллер.
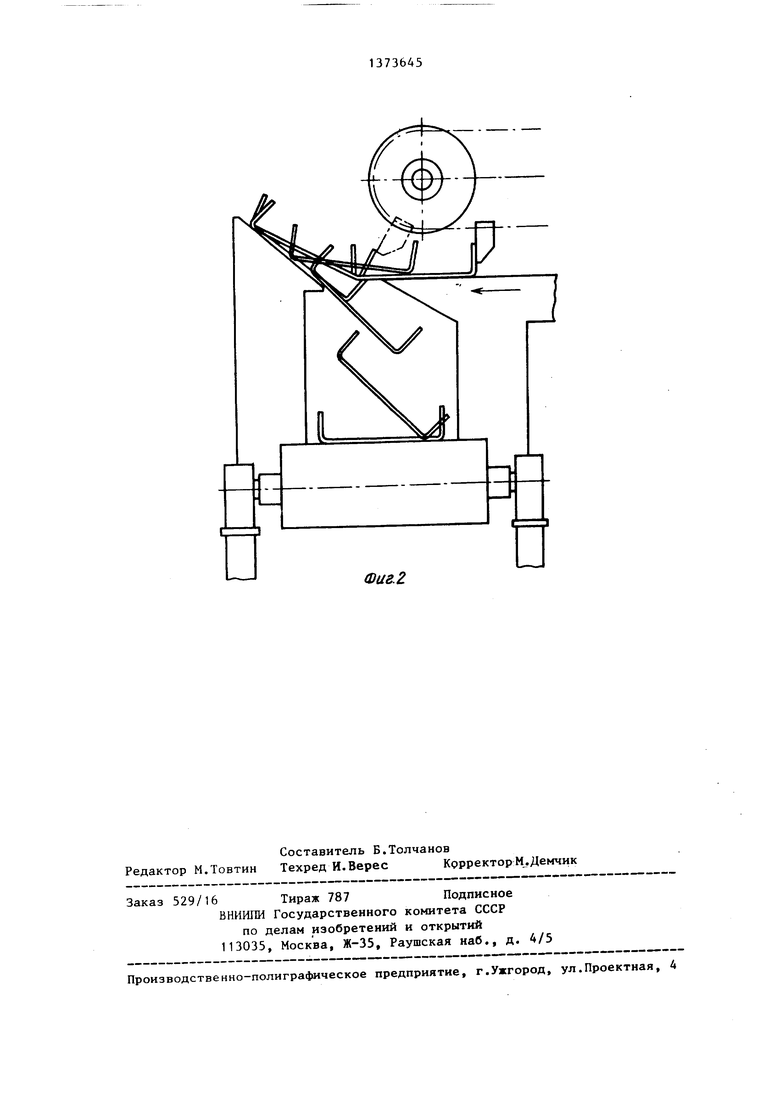
На фиг. 1 изображен предлагаемый механизм с ориентацией швеллера, движущегося полками вниз; на фиг.2 - то же, движущегося полками вверх.
Механизм ориентации швеллеров включает подающий конвейер 1 с толкателями 2, расположенньй над рабочей поверхностью опорной направляющей 3. На расстоянии 0,4-0,48 высоты стенки швеллера от выходного конца опорной направляющей 3 устанавливается упор 4 с наклонной в сторону последней поверхностью, а на расстоянии 1,2-1,3 высоты стенки под проемом, образованным упором 4 и выходным концом опор- ной направляющей 3, устанавливается отводящий конвейер (рольганг) 5. Наклонная поверхность упора 4 может быть плоской или криволинейной. Выходной конец опорной нaпpaвляJoщeй 3, обращенной в сторону рольганга 5, выполнен со скосом и образует острый угол с рабочей поверхностью опорной направляющей 3.
Механизм ориентации швеллеров ра- ботает следующим образом.
Швеллер толкателями 2 конвейера 1 подается к выходному концу направляющей 3, например, полками вниз. Когда передняя полка швеллера достигает конца опорной направляющей 3, он передней полкой проваливается в зазор между концом направляющей 3 и упором 4, опираясь на стенку и заднюю полку Дальнейшее перемещение толкателя 2 вызывает перемещение центра тяжести швеллера по кривой, а по достижению центром тяжести конца направляющей 3 падение на рольганг 5 с разворотом, ориентируясь полками вверх. Если швеллер по направляющей 3 подается полками вверх, он углом передней полки и стенки вступает во взаимодейст
5 0 5 0
Q
0
вие с наклонндй поверхностью упора 4 и перемещается вверх. Задней полкой он взаимодействует с толкателем 2, но только силами трения. В определенный момент, когда сил трения недостаточно для их взаимодействия, швеллер ложится стенкой на поверхность упора 4 и начинает движение назад под скос опорной направляющей 3. Разворота в этом случае не происходит и он падает на рольганг 5 полками вверх. Расстояние от торца направляющей до упора выбрано с учетом предотвращения опрокидывания в зазор между направляющей и упором при движении швеллера полками вверх, а расстояние от поверхности направляющей до валков рольганга - из условия возможности разворота швеллера после падения с направляющей (для случая движения швеллера по направляющей полками вниз).
Формула изобретения
1.Механизм ориентации деталей, включающий опорную направлякнцую, подающий конвейер с толкателями для перемещения деталей по опорной направляющей, упор, установленный на расстоянии -от выходного конца опорной направлякяцей, и отводящий конвейер, расположенный под проемом, образованным между опорной направляющей и упором, отлича ющийся тем, что, с целью повьшения надежности ориентации деталей типа швеллер, упор выполнен с наклонной в сторону опорной направляющей поверхностью, а выходной конец опорной направляющей
со стороны, обращенной К отводящему конвейеру, выполнен со скосом, образующим с рабочей поверхностью опорной направляющей острый угол.
2.Механизм по п. 1, отличающийся тем, что наклонная поверхность упора выполнена плоской.
3.Механизм по п. 1, отличающийся тем, что наклонная поверхность упора выполнена криволинейной.
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации длинномерных заготовок | 1984 |
|
SU1222603A1 |
| Механизм ориентации | 1980 |
|
SU876364A1 |
| Устройство для сборки звеньев железнодорожного пути | 1977 |
|
SU931891A1 |
| Устройство для накопления и поштучной выдачи длинномерных профильных заготовок | 1989 |
|
SU1669621A1 |
| МЕХАНИЗМ ОРИЕНТИРОВАННОЙ ПЕРЕДАЧИ ДЕТАЛЕЙ | 2001 |
|
RU2189344C1 |
| Устройство для ориентированной выдачи деталей | 1990 |
|
SU1722783A1 |
| Устройство для поштучной выдачи длинномерных заготовок из пакета | 1980 |
|
SU880925A1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| Устройство для набора прямоугольных изделий в пакет | 1980 |
|
SU925775A1 |
| Автоматическая линия для изготовления длинномерных балок | 1988 |
|
SU1611671A1 |