Изобретение относится к обработке давлением, а именно к устройствам для гибки труб, и может быть использовано при гиб- ке концов труб оребренных алюминиевых радиаторов, выполненных в виде змеевика.
Цель изобретения - улучшение условий труда и повышение производительности.
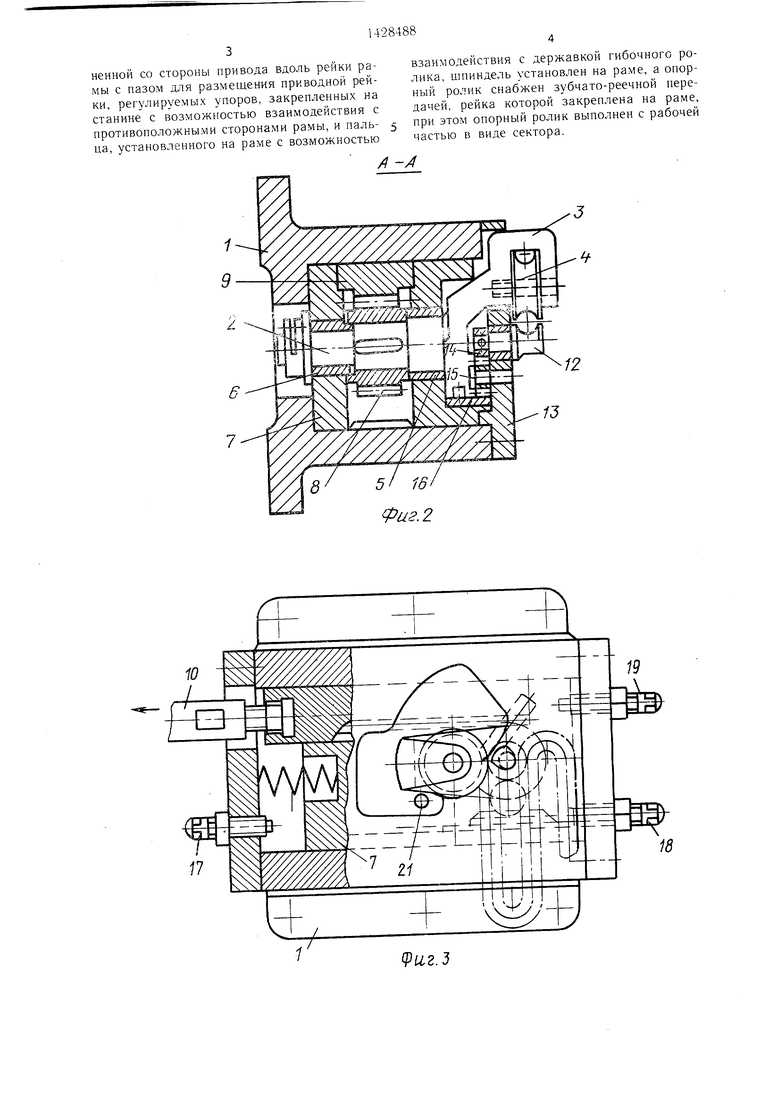
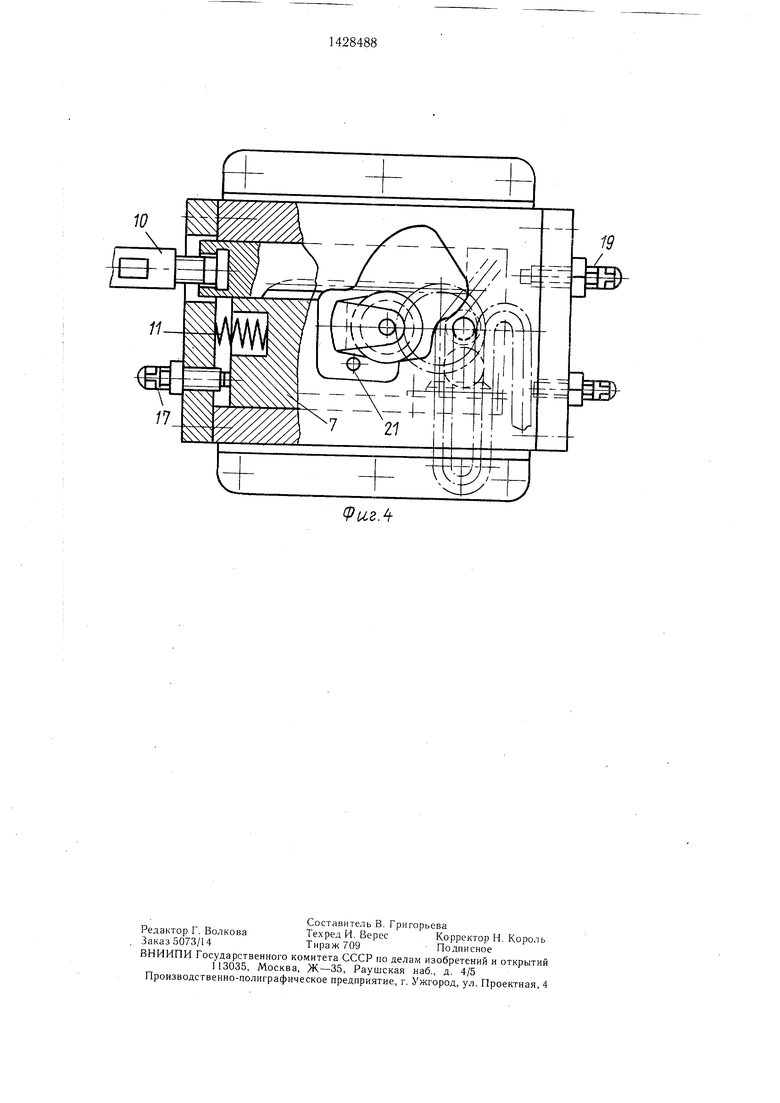
На фиг. 1 изображено устройство, вид сверху; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - устройство в начале обратного хода; на фиг. 4 - то же, в момент отвода гибочного ролика от опорного.
: Устройство для гибки труб состоит из станины 1, выполненной в виде коробчатого корнуса, шпинделя 2 с выполненной с ним державкой 3, имеюнщей паз для раз- мещения гибочного ролика 4. Шпиндель 2 ус тановлен поворотно во втулках 5 и 6 по- ДЕ(ИЖНОЙ рамы 7 механиз.ма отведения ги- бс|чного ролика от опорного, которая направляется стенкой паза в станине 1. В середине шпинделя закреплено зубчатое колесо, на-ходяш ееся в зацеплении с рейкой 9, сое- дцненной со штоком 10 пневмопривода. Рама 7 подпружинена с помощью пружины 11, опорный ролик-копир 12 установлен поворотно во втулке, которая в свою очередь запрессована в верхнюю часть станины - крышку 13 коробчатого корпуса 1. На нижней части опорного ролика жестко закреплен зубчатый сектор 14, который своими зубцами через паразитную шестерню 15 зацеплен с рейкой 16, закрепленной винтами на раме 7. С подвижной рамой 7 взаимодействуют концевые упоры 17 и 18. Рейка 9, служащая для привода во вращение щг1инделя 2, имеет на стенке коробча- Toifo корпуса упор 19 (регулируемый). В ; крышке коробчатого корпуса 13 име- етея фигурный паз 20 для размещения державки 3, а на раме 7 имеется упорный щтифт 21 для ограничения поворота шпинделя при контакте с ним державки 3. На станине также установлен фиксатор 22 заготовки.
Устройство работает следующим образом.
Рассмотрим .момент, когда силовой цилиндр срабатывает на рабочий ход (фиг. 1, момент окончания гибки). Рейка 9 подходит к упору 19 и, повернув шпиндель, останавливает гибочный ролик 4 в положении нужного гиба. Пружина 11 почти разжимается. В начале обратного хода, поскольку пружина 11 воздействует на раму 7, то она удерживает ее в крайнем правом положении до тех пор, пока шпиндель 2 с державкой 3 и гибочным роликом 4 от взаимодействия шестерни 8 с рейкой 9 не поворачивается до момента упора державки в упорный штифт 21, находящийся на раме 7. Это поворот гибочного ролика в исходное положение после гибки. Шпиндель 2 с шестерней 8, державкой 3 и гибочным роликом 4 прекращает свое вращение. А поскольку цилиндр продолжает ход
0
0
5
5
0
5
0
5
то он вынужден за счет зубчатого зацепления рейки 9 с шестерней 8 передвигать ра.му 7 влево, сжимая пружину 11. Но посколь.ку рама двигалась влево,, а она несет на себе рейку 16, находящуюся в зацеплении через паразитную шестерню 15 с зубчатым сектором опорного ролика 12, то опорный ролик 12 в результате поворачивается на определенный угол. То есть желоб опорного ролика, выйдя из контакта с изгибаемой трубкой, создает возможность снятия детали с позиции гибки. В этом же положении ставится новая заготовка, у которой есть только змеевидный изгиб с прямым крайним звеном, фиксируемым .фиксатором 22. При этом ни гибочный ролик 14, ни опорный ролик 12 не мешают установке на гибочную позицию очередной заготовки. После установки заготовки и зажатия ее рабочий пневмоцилиндр включается на рабочий ход. Шток и рейка начинают двигаться вправо. При этом в первую очередь пружина разжи.уастся, дэигая вправо раму 7 до тех пор, пока опа ке упирается в упор 18. А это значит, вместе с рамой останавливается и вал 2 с шестерней 8. ролик 4 входит своим желобол в контакт с трубкой. При движении рамы вправо гп/тем зацепления уже рассмотренных элемеьггов опорный ролик 12 поворачивается в рабочее положение, т.е. желобом входит в контакт с трубкой. В то же время шток 10 с рейког: 9 продолжает движение вправо, рейка н.ачи- нает поворачивать вал с гибочным ролико.м 4, взаимодействуя с зубчатым колесом 8, до тех пор, пока рейка не упирается в настраиваемый упор 19. В этом положении гибочмый ролик заканчивает гиб трубки.
Предлагаемое устройство юзволяет исключить ручной труд для подвода и отвода гибочного ролика, а также установку опорного ролика-копира в нужное положение во время гибочного процесса. Наиболее целесообразно использовать предлагаемое устройство при осуществлении гибки обоих концов трубы с приближением их к средней змеевидной части алюминиевых оребренных масляных радиаторов.
Формула изобретения
0
Устройство для гибки труб, преимущественно концов змеевиков, содержащее установленный на полой станине поворотный щпиндель с несущей гибочный ролик державкой, на одном конце и с шестерней в его средней части, взаимодействующей с рейкой, связанной с приводом, опорный ролик, установленный соосно со шпинделем, механизм отведения гибочного ролика от опорного и 5 фиксатор заготовки, отличающееся те.м, что, с целью улучщения условий труда и повышения производительности, механиз.м отведения гибочного ролика от опорного выполнен в виде установленной в станине и подпружиненной со стороны привода вдоль рейки рамы с пазом для размещения приводной рейки, регулируемых упоров, закрепленных на станине с возможностью взаимодействия с
противоположными сторонами рамы, и паль- 5 Р опорный ролик выполнен с рабочей ца, установленного на раме с возможностью частью в виде сектора.
взаимодействия с державкой гибочного ролика, шпиндель установлен на раме, а опорный ролик снабжен зубчато-реечной передачей, рейка которой закреплена на раме.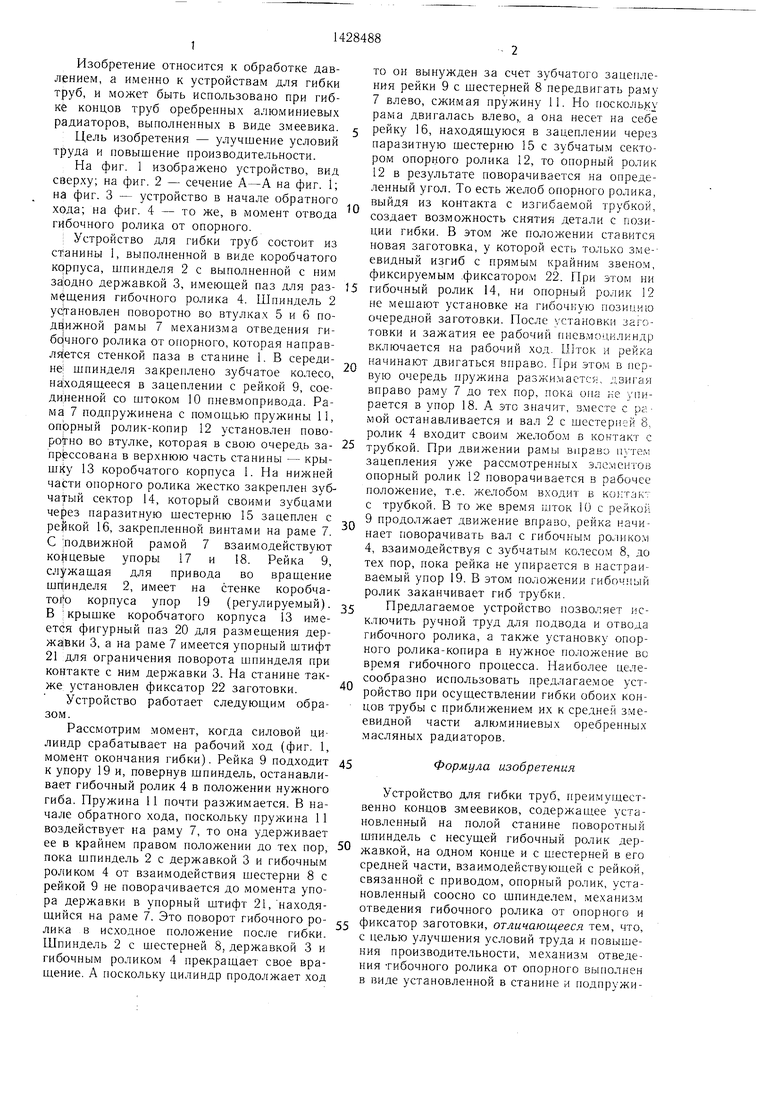
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| СТАНОК ДЛЯ ГИБКИ ЗМЕЕВИКОВ | 1971 |
|
SU290635A1 |
| СТАНОК ДЛЯ ГИБКИ КРУГЛОГО ПРОФИЛЯ | 2006 |
|
RU2333066C2 |
| Станок для гибки изделий | 1985 |
|
SU1279705A1 |
| Станок для соединения витков двухплоскостных спиралей скобами | 1988 |
|
SU1549644A1 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |
| Станок для изготовления змеевиков | 1980 |
|
SU946724A1 |
| Трубогибочное устройство | 1988 |
|
SU1667986A2 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
Изобретение относится к обработке давлением, а имен1ю к устройствам для гибки труб, и может быть использовано нри гибке концов труб оребренных алюминиевых радиаторов, .выполненных в виде змеевика. Цель - улучшение условий труда и повыше10 тт/л ние приизводитчльности. Устройство содержит шпиндель с державкой и шестерней, приводимую рейку, опорный ролик, установ- лепньп; соосно шпинделю. Устройство содержит также механизм отведения гибочного ролика от опорного в виде подпружиненной со стороны привода рамы с пазом для размещения приводной рейки. Церед началом рабочего хода пружина удерживает раму в Kpa iniCM нравом положении до тех нор. пока иншндсль с державкой и гибочным роликом не повернется от рейки до контакта державки с упорным штифтом. Рама, продолжая передвигаться рейкой, поворчивает опорный ролик для снятия детали и установки Заготовки. После этого рама перемеш.ается внра- во и производится гибка заготовки. 4 ил. Л ё I (С (Л с 4: Ю оо 4 ОО 00 22 Фиг.1
.З
10
19
ФигЛ
| Трубогибочный станок | 1977 |
|
SU670357A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
