САЭ 00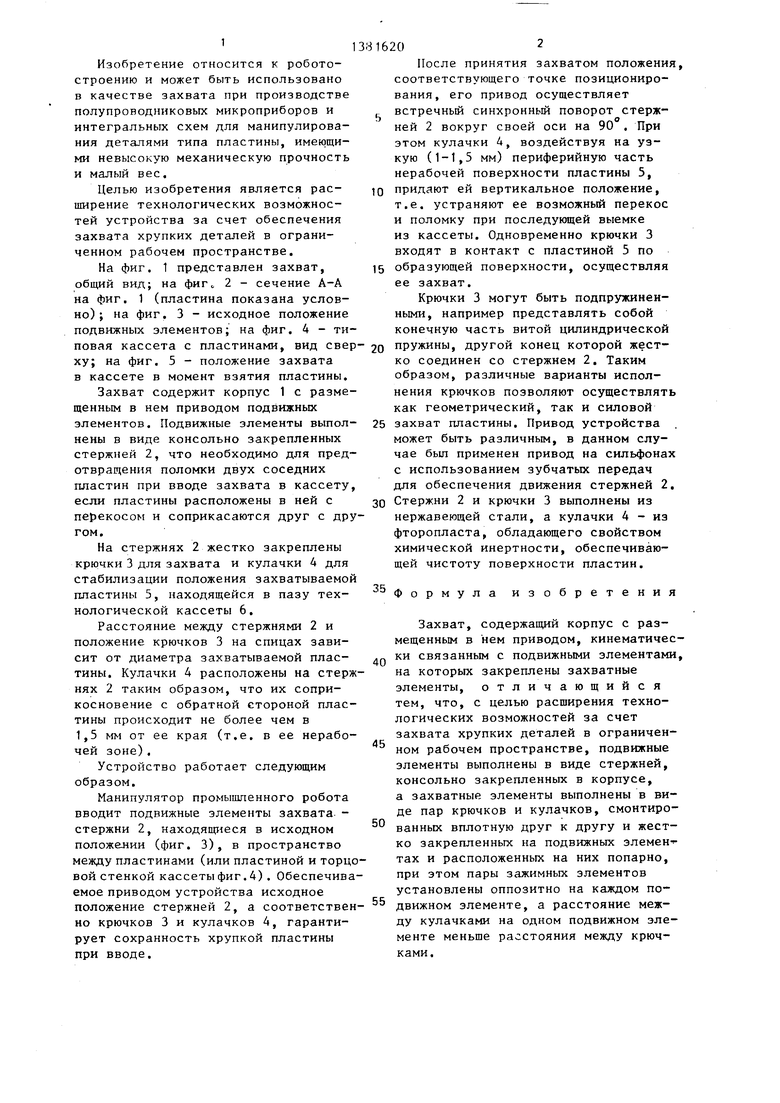
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| СПОСОБ ФОРМИРОВАНИЯ ШТАБЕЛЕЙ ЛЕГИРУЕМЫХ С ОДНОЙ СТОРОНЫ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН, В ЧАСТНОСТИ СОЛНЕЧНЫХ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН, И СИСТЕМА МАНИПУЛИРОВАНИЯ ДЛЯ ЗАГРУЗКИ ТЕХНОЛОГИЧЕСКОЙ ЛОДОЧКИ ПАРТИЯМИ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 2007 |
|
RU2411608C1 |
| Загрузочный ротор | 1990 |
|
SU1757842A1 |
| МЕХАНИЧЕСКИЙ ЗАХВАТ | 2001 |
|
RU2190519C1 |
| Способ обкатки беговой дорожки оси велопедали и роторно-конвейерная линия для его осуществления | 1990 |
|
SU1781016A1 |
| Схват промышленного робота | 1985 |
|
SU1324846A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Устройство для ориентированнойпОдАчи КОлпАчКОВ | 1979 |
|
SU797972A1 |
| Устройство к прессу для манипулирования обработанной деталью | 1980 |
|
SU990381A1 |
Изобретение относится к робототехнике и может быть использовано в качестве захвата при производстве полупроводниковых микроприборов и интегральных схем для манипулирования деталями типа пластины, имеющими невысокую механическую прочность и небольшую массу. Целью изобретения является расширение технологических возможностей устройства за счет обеспечения захвата хрупких деталей в ограниченном рабочем пространстве. Захват содержит корпус 1 с размещенным в нем приводом подвижных элементов, выполненных в виде консольно закрепленных стержней 2. На стержнях 2 жестко закреплены захватные элементы в виде крючков 3 и кулачка 4для стабилизации захватываемой пластины. Захват осуществляется поворотом стержней 2 вокруг своей оси навстречу друг другу. При этом кулачки 4 воздействуют на периферийную часть нерабочей поверхности захватываемой пластины, а крючки 3 входят с ней в контакт по образующей поверхности. Расстояние между стержнями 2 и положение крючков 3 и кулачков 4 на стержнях 2 зависит от диаметра захватываемой пластины. 5ил. i (Л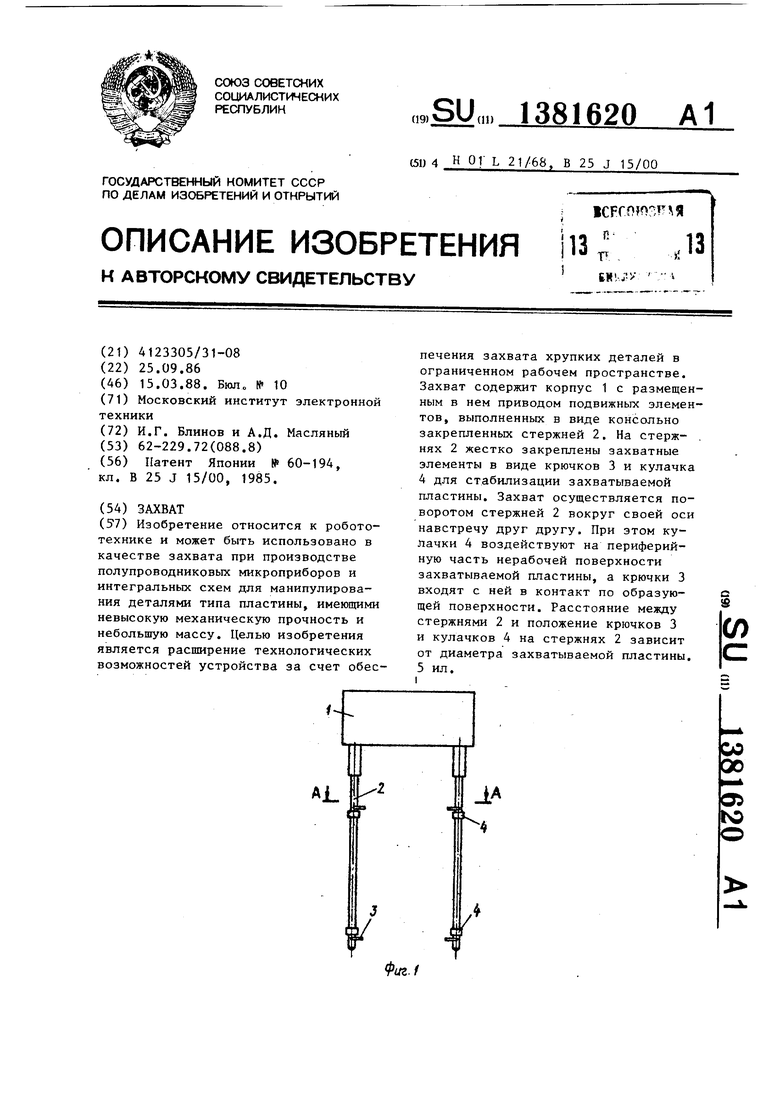
AL
А 4
/
Фuz.f
Изобретение относится к роботостроению и может быть использовано в качестве захвата при производстве полупроводниковых микроприборов и интегральных схем для манипулирования деталями типа пластины, имеющими невысокую механическую прочность и малый вес.
Целью изобретения является расширение технологических возможностей устройства за счет обеспечения захвата хрупких деталей в ограниченном рабочем пространстве.
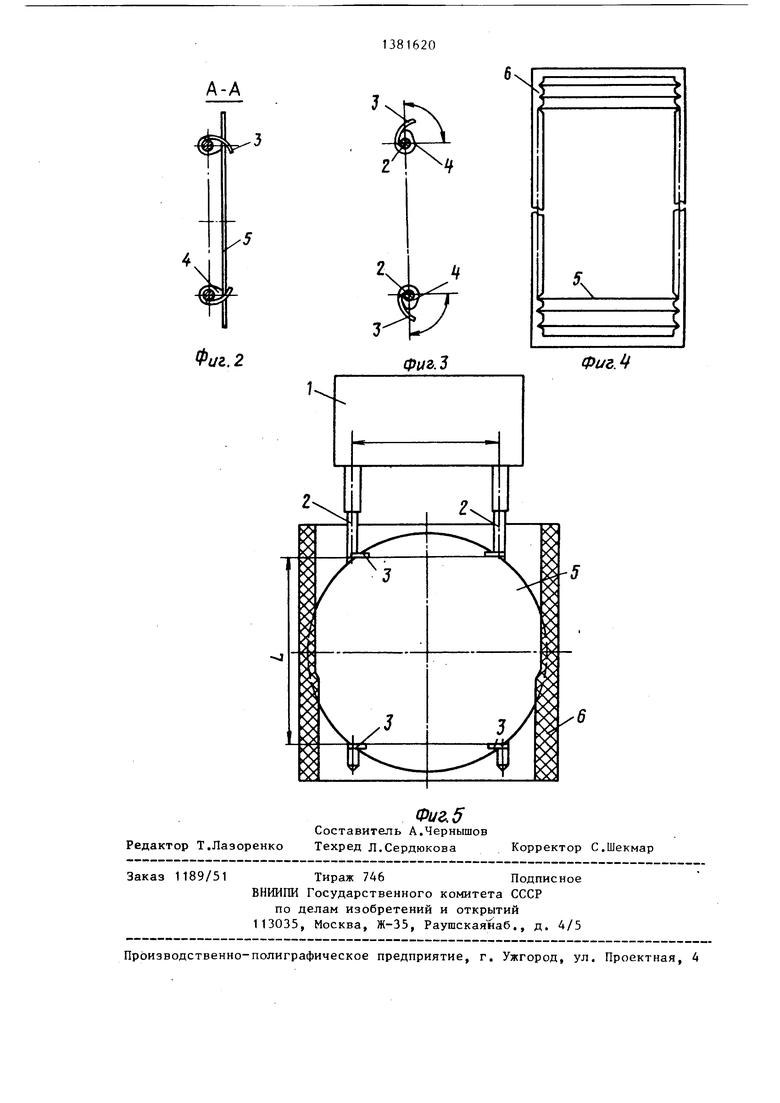
На фиг. 1 представлен захват, общий вид; на фиг 2 - сечение А-А на фиг. 1 (пластина показана условно); на фиг. 3 - исходное положение подвижных элементов; на фиг. 4 - типовая кассета с пластинами, вид свер ху; на фиг. 5 - положение захвата в кассете в момент взятия пластины.
Захват содержит корпус 1 с размещенным в нем приводом подвижных элементов. Подвижные элементы выполнены в виде консольно закрепленных стержней 2, что необходимо для предотвращения поломки двух соседних пластин при вводе захвата в кассету, если пластины расположены в ней с перекосом и соприкасаются друг с дру гом.
На стержнях 2 жестко закреплены крючки 3 для захвата и кулачки 4 для стабилизации положения захватываемой пластины 5, находящейся в пазу технологической кассеты 6.
Расстояние между стержнями 2 и положение крючков 3 на спицах зависит от диаметра захватываемой пластины. Кулачки 4 расположены на стержнях 2 таким образом, что их соприкосновение с обратной стороной пластины происходит не более чем в 1,5 мм от ее края (т.е. в ее нерабочей зоне).
Устройство работает следующим образом.
Манипулятор промышленного робота вводит подвижные элементы захвата. - стержни 2, находящиеся в исходном положелии (фиг. 3), в пространство между пластинами (или пластиной и тордо вой стенкой кассеты фиг. 4). Обеспечиваемое приводом устройства исходное положение стержней 2, а соответственно крючков 3 и кулачков 4, гарантирует сохранность хрупкой пластины при вводе.
816202
После принятия захватом положения, соответствующего точке позиционирования, его привод осуществляет
,- встречный синхронный поворот стержней 2 вокруг своей оси на 90 . При этом кулачки 4, воздействуя на узкую (1-1,5 мм) периферийную часть нерабочей поверхности пластины 5,
Q придают ей вертикальное положение, т.е. устраняют ее возможный перекос и поломку при последующей выемке из кассеты. Одновременно крючки 3 входят в контакт с пластиной 5 по
15 образующей поверхности, осуществляя ее захват.
Крючки 3 могут быть подпружинен- ньпчи, например представлять собой конечную часть витой цилиндрической 20 пружины, другой конец которой жестко соединен со стержнем 2. Таким образом, различные варианты исполнения крючков позволяют осуществлять как геометрический, так и силовой
25 захват пластины. Привод устройства может быть различным, в данном случае был применен привод на сильфонах с использованием зубчатых передач для обеспечения движения стержней 2.
30 Стержни 2 и крючки 3 выполнены из нержавеющей стали, а кулачки 4 - из фторопласта, обладающего свойством химической инертности, обеспечивающей чистоту поверхности пластин.
35
Формула изобретения
Захват, содержащий корпус с размещенным в нем приводом, кинематически связанным с подвижными элементами, на которых закреплены захватные элементы, отличающийся тем, что, с целью расщирения технологических возможностей за счет захвата хрупких деталей в ограниченном рабочем пространстве, подвижные элементы выполнены в виде стержней, консольно закрепленных в корпусе, а захватные элементы выполнены в виде пар крючков и кулачков, смонтиро- ванных вплотную друг к другу и жестко закрепленных на подвижных элемен-г тах и расположенных на них попарно, при этом пары зажимных элементов установлены оппозитно на каждом по- движном элементе, а расстояние между кулачками на одном подвижном элементе меньше расстояния между крючками.
А-А
х«
Фиг,. 2
.3
.
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
