fl,
Изобретение относится к погрузоч- но-разгрузочным работам и может быть исподтьзовано для выгрузки сыпучих материалов из мягких контейнеров в химической, строительной и других отраслях народного хозяйства.
Цель изобретения - повышение надежности работы.
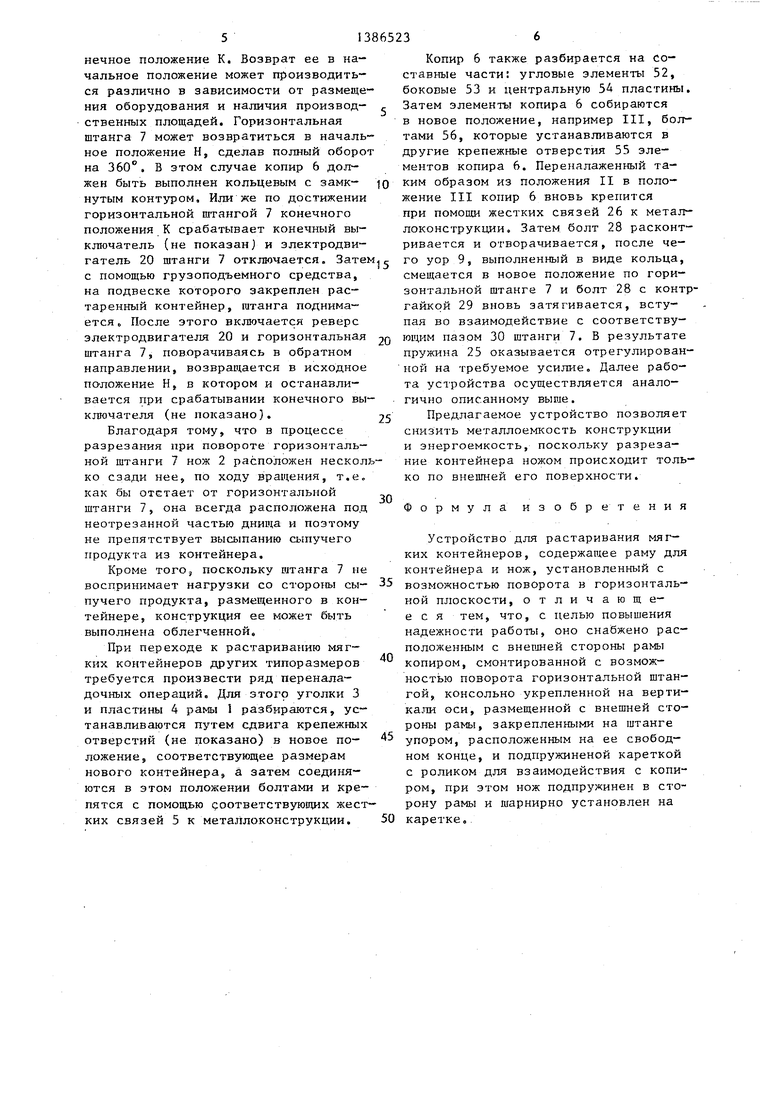
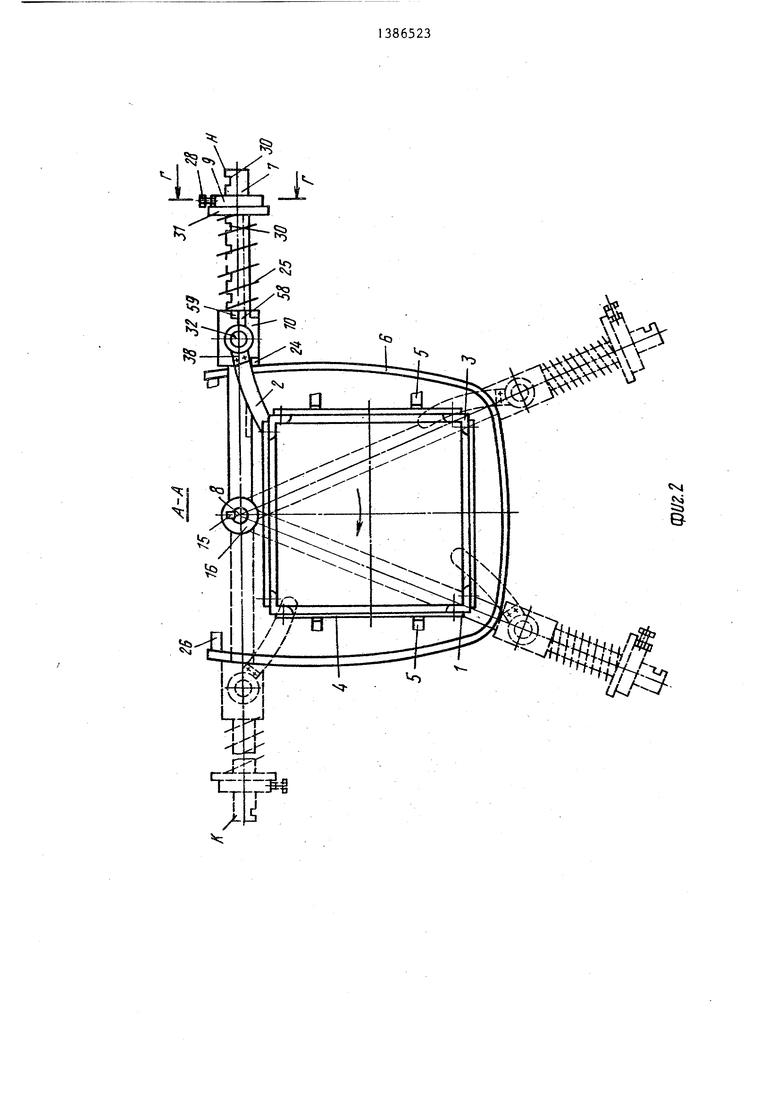
На фиг. I изображено предлагаемое устройствоJ общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1 ; на фиг, 4 - вид В на фиг. 1; на фиг. 5 - сечение Г-Г на фиг. 2; на фиг. 6 - сечение Д-Д на фиг, 1; на фиг. 7 - копир, вариант; на фиг 8 - нож, вариант; на фиг. 9 - узел I на фиг. 7.
Устройство для растаривания мягких контейнеров содержит раму 1 для контейнера и нож 2, установленный с возможностью поворота в горизонтальной плоскости. Рама 1 выполнена в ви- .де уголков 3, жестко соединенных между собой пластинами 4 с помощью разъемного соединения, например болтов, для переналаживания, их на .различные типоразмеры мягких контейнеров за счет ряда отверстий (не показаны), выполненных в пластинах 4. Рама 1 служит для фиксации днища мягкого контейнера в определенном положении и предотвращения его смещения при . растаривании. Пластины 4 соединены при помощи жестких связей 5 с металлоконструкцией (не показано). Мягкий контейнер удерживается на раме 1 во взвешенном положении грузоподъемным средством (не показано).
Устройство снабжено расположенным с внешней стороны рамы 1 копиром 6, смонтированным с возможностью поворота горизонтальной штангой 7, консоль- но укрепленной на вертикальной оси 8 размещенной с внешней стороны рамы 1 закрепленными на штанге 7 упором 9, расположенным на ее свободном конце и подпружиненной кареткой 10 с роликом 11 для взаимодействия с копиром 6 При этом нож 2 подпружинен в сторону рамы ,1 и шарнирно установлен на каретке 10.
Вне зоны (очерченной контур мягкого контейнера наибольшего размера) размещено жестко прикрепленное к металлоконструкции основание 12, в котором на упорном 13 и радиальном 14 подшипниках с возможностью вращения установлена ось 8, на последней на
0
5
0
5
0
5
0
5
0
5
шпонке 15 расположена втулка 16 t жестко закрепленной на ней горизонтальной штангой 7. От осевого смещения втулка 16.предохраняется кольцом 17, установленным в кольцевой проточке 18 оси 8. Верхний конец оси 8 связан муфтой 19 с приводным электродвигателем 20, установленным на кионштейне 21, жестко закрепленном на металлоконструкции.
На горизонтальной штанге 7 с возможностью возвратно-поступательного перемещения установлена каретка 10 с размещенной в ней щпонкой 22, взаимодействующей со щпоночным пазом 23 штанги 7, которая фиксируется от перемещения в осевом направлении относительно каретки 10 пластинами 24. закрепленными на торцах каретки 10.
На каретке 10 в нижней ее части с возможностью вращения на жестко закрепленной оси установлен ролик 11, взаи1 одействующий с копиром 6, охва- тываюишм мягкий контейнер, который постоянно поджимается к копиру 6 под действием пружинь: 25, один конец последней взаимодействует с торцом каретки 10, а другой конец - с неподвижным упором 9, жестко закрепленным на горизонтальной штанге 7.
Копир 6 крепится к металлоконструкции при помощи жестких связей 26. Для регулирования усилия пружины. 25 или же в случае перехода к растари- ванию контейнеров другого типоразме- . ра, упор 9 с возможностью перестановки по длине горизонтальной штанги 7 выполнен в виде кольца, в резьбовое отверстие 27 которого ввернут болт 28 с контргайкой 29, взаимодействующей своим концом с одним из пазов 30, выполненным по длине горизонтальной штанги 7. Между пружиной 25 и упором 9 размещена упорная шайба 31.
Каретка 10 снабжена жестко установленной на ней вертикальной осью 32, на которой с возможностью поворота на подшипниках 33 установлен корпус 34 ножа 2, который зафиксирован от осевого перемещения крышкой подшипников 35, а с другой стороны - кольцом 36, установленным в кольцевой проточке 37 оси 32. В кронштейнах 38 корпуса 34 же.стко закреплен болтами нож 2. Корпус 34 подпружинен в окружном направлении спиральной пружиной 39 в сторону постоянного взаимодействия ножа 2 со стенкой мягкого
контейнера. Спиральная пружина 39 размещена, в гнезде 40 корпуса 34, один конец 41 которой жестко закреп- ле:н в пазу 42, выполненном на конце оси 32, а другой ее конец 43 - на стенке 44 гнезда 40 корпуса 34, Гнездо 40 закрыто сверху крупжой 45.
Нож 2 (фиг. 8) выполнен в виде дисковой фрезы 46, размещенной на ва лу 47, установленном с возможностью вращения в гнезде бобышки 48 каретки 10. Вал 47 соединен муфтой 49 с валом электродвигателя 50, размещенного на кронштейне 51, жестко закреп ленном на каретке 10.
В зависимости от имеющихся в наличии производственных площадей и расположенного рядом оборудования горизонтальная штанга 7 может совер- шать полый оборот на ЗбО (в этом случае копир 6 должен быть кольцевым или может возвращаться из конечного положения К в начальное положение Н поворотом в обратном направлении. Отключение приводимого электродвигателя 20 горищонтальной штанги 7 может производиться при помощи конечных выключателей (не показаны).
Для обеспечения перехода с одно- го типоразмера контейнера на другой копир 6 может быть выполнен составным, т.е. состоящим из двух угловых элементов 52, двух боковых пластин. 53 и одной центральной пластины 54, в каждой из которых имеется ряд от- верстий 55 для соединения их между собой болтами 56. Это позволяет, сместив крепежные отверстия 55 составных элементов копира 6 и вновь соединив их, перевести копир 6 из позиции II, например, в позицию III и производить растаривание мягких контейнеров других типоразмеров. Скосы 57 при этом на концах боковых пластин 53 и центральной 54 обеспечивают плавное обкатывание ролика 11 каретки 10 по копиру 6.
Для ограничения угла поворота ножа 2 корпус 34 снабжен жестко установленным на нем ограничителем 58 поворота, взаимодействующим в крайнем положении с упором 59, жестко закрепленным на корпусе 34. .
Устройство работает следующим образом.
В начале работы горизонтальная штанга 7 находится в начальном положении Н. При помощи грузоподъемного
Q
Q 5
5
0
5
0
0
средства мягкий контейнер опускаете - на раму 1, чтобы днище контейнера опустилось ниже ножа 2. Контейнер удерживается в таком положении грузоподъемным средством в течение всего времени работы устройства. Нож 2 находится в крайнем положении, при котором ограничитель 58 поворота, жестко установленный на корпусе 34, взаимодействует с упором 59, жестко закрепленным на каретке 10, под действием спиральной пружины 39. Ролик. 11 каретки 10 постоянно взаимодействует с копиром 6 под действием пружины 25, установленной на горизонтальной штанге 7.
Оператор включает электродвигатель 20 привода поворота горизонтальной штанги 7, св.язанный с ее осью 8. Итанга 7 начинает поворачиваться вокруг вертикальной оси. Нож 2 подводится к стенке контейнера и при дальнейшем повороте горизонтальной штанги 7 вступает во взаимодействие со стенкой контейнера, разрезая ее. Нож 2 при этом несколько поворачивается в сторону закручивания спиральной пружины 39, за счет чего усилие резания ножа 2 возрастает. Каретка 10 за счет взаимодействия ролика 11 с копиром 6 смещается вдоль горизонтальной штанги 7, сжимая пружину 25. В дальнейшем при повороте горнзон- тальной штанги 7 каретка 10 совершает колебательные движения вдоль нее под действием пружины 25 и копира б.
В процессе поворота горизонтальной штанги 7 нож 2 разрезает стенку контейнера по периметру с трех сторон. Нагрузка на нож 2 при этом со стороны сыпучего материала, находящегося в контейнере, оказывается минимальной, поскольку нож 2 не проникает глубоко в полость контейнера, а движется вдоль стенки контейнера по траектории, определяемой формой копира 6, охватывающего контейнер.
При использовании в качестве режущего элемента, например, дисковой фрезы 46 процесс разрезания контейнера осуществляется аналогично, с той лишь разницей, что при включенном электродвигателе 20 горизонтальной штанги 7 одновременно включается и электродвигатель 50 привода вращения дисковой фрезы 46.
В конце процесса растариваний горизонтальная штанга 7 приходит в ко-
нечное положение К. Возврат ее в начальное положение может производиться различно в зависимости от размещения оборудования и наличия производ- ственных площадей. Горизонтальная штанга 7 может возвратиться в начальное положение Н, сделав полный оборо на 360. В этом случае копир 6 должен быть выполнен кольцевым с замк- нутым контуром. Или же по достижении горизонтальной штангой 7 конечного положения К срабатывает конечный выключатель (не показан) и электродвигатель 20 штанги 7 отклк1чается. Зате с помощью грузоподъемного средства, на подвеске которого закреплен рас- таренный контейнер, гатанга поднимается. После этого включается реверс электродвигателя 20 и горизонтальная штанга 7, поворачиваясь в обратном направлении, возвращается в исходное положение Н в котором и останавливается при срабатывании конечного выключателя (не показано).
Благодаря тому, что в процессе разрезания при повороте горизонтальной штанги 7 нож 2 расположен несколко сзади нее, по ходу вращения, т.е. как бы отстает от горизонтальной штанги 7, она всегда расположена под неотрезанной частью днища и поэтому не препятствует высыпанию сыпучего продукта из контейнера.
Кроме того, поскольку штанга 7 не воспринимает нагрузки со стороны сыпучего продукта, размещенного в контейнере, конструкция ее может быть выполнена облегченной.
При переходе к растариванию мягких контейнеров других типоразмеров требуется произвести ряд перенала- дочных операций. Для этого уголки 3 и пластины 4 рамы i разбираются, устанавливаются путем сдвига крепежных отверстий (не показано) в новое по- ложение, соответствующее размерам нового контейнера, а затем соединяются в этом положении болтами и крепятся с помощью соответствующих жестких связей 5 к металлоконструкции.
0
5
50
0
5
0
Копир 6 также разбирается на составные части: угловые элементы 52, боковые 53 и центральную 54 пластины. Затем элементы копира 6 собираются в новое положение, например III, болтами 56, которые устанавливаются в другие крепежные отверстия 55 элементов копира 6. Переналаженный таким образом из положения II в положение III копир 6 вновь крепится при помощи жестких связей 26 к металлоконструкции. Затем болт 28 расконт- ривается и отворачивается, после чего уор 9, выполненный в виде кольца, смещается в новое положение по горизонтальной штанге 7 и болт 28 с контргайкой 29 вновь затягивается, вступая во взаимодействие с соответствующим пазом 30 штанги 7, В результате пружина 25 оказывается отрегулированной на требуемое усилие. Далее работа устройства осуществляется аналогично описанному выше.
Предлагаемое устройство позволяет снизить металлоемкость конструкции и энергоемкость, поскольку разрезание контейнера ножом происходит только по внешней его поверхности.
Формула изобретения
Устройство для растаривания мягких контейнеров, содержащее раму для контейнера и нож, установленный с возможностью поворота в горизонтальной плоскости, отличающееся тем, что, с целью повышения надежности работы, оно снабжено расположенным с внешней стороны рамы копиром, смонтированной с возможностью поворота горизонтальной штангой, консольно укрепленной на вертикали оси, размещенной с внешней стороны рамы, закрепленными на штанге упором, расположенным на ее свободном конце, и подпружиненой кареткой с роликом для взаимодействия с копиром, при этом нож подпружинен в сторону рамы и шарнирно установлен на каретке.
УтЛ
ж
5 Б-б
зв
г-г
дидв
20
21
фигА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для запрессовки и обрезки ладков в грифе музыкального инструмента | 1985 |
|
SU1307471A1 |
| Устройство для наполнения мягких контейнеров сыпучим материалом | 1986 |
|
SU1342823A1 |
| Многопозиционная машина для бесшвейного скрепления книжных блоков | 1989 |
|
SU1671474A1 |
| Линия для изготовления и сборки грифов музыкальных инструментов | 1983 |
|
SU1169013A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Подающее устройство к деревообрабатывающему станку | 1985 |
|
SU1288061A1 |
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| Устройство для растаривания мягких контейнеров | 1987 |
|
SU1518210A1 |
| Установка для расфасовки сыпучих продуктов в барабаны | 1986 |
|
SU1414709A1 |
| Саморазгружающийся контейнер | 1985 |
|
SU1284897A1 |
Изобретение относится к погру- 3очно-разгрузочным работам и может быть использовано для выгрузки сыпучих материалов из мягких контейнеров в химической, строительной и других отраслях народного хозяйства. Цель изобретения - повышение надежности работы. Мягкий контейнер устанавливают на раму 1 в виде уголков 3, соединенных пластинами 4. При повороте горизонтальной штанги 7 вокруг вертикальной оси 8 нож 2, смонтированный шарнирно на корпусе 34, прижимается к стенке контейнера и разрезает ее. За счет взаимодействия ролика 11 с копиром 6 каретка 10 перемещается по штанге 7, сжимая пружину 25, опирающуюся другим концом на упор 9 через шайбу 31. Нож 2 поджимается к стенке контейнера спиральной пружиной и движется вдоль поверхности контейнера по траектории, определяемой формой копира 6. Под действием Q массы материала контейнера раскрывается и происходит разгрузка контейнера, 9 ил. (Л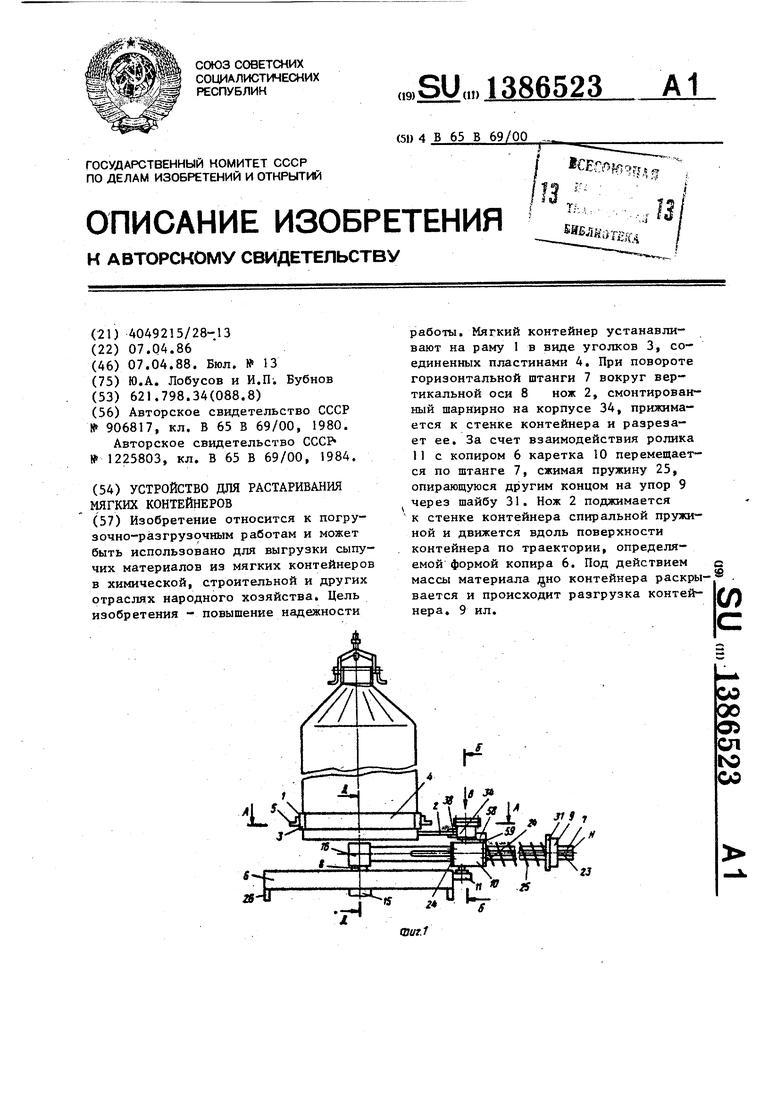
26
5330
фиг. 6
57 J- Ж 52
фиг. 8
фиг. 5
,2В
52
Г 3
фигЛ
тг.з
| Устройство дя растаривания контейнеров | 1980 |
|
SU906817A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для растаривания мягких контейнеров | 1984 |
|
SU1225803A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
