оо оо ;о со оо
Изобретение относится к машиностроению и может быть использовано для подачи деталей из навала в технологическое оборудование различного назначения.
Цель изобретения - повышение надеж- ности работы за счет сокраш.ения числа приводных механизмов.
На фиг. 1 представлено устройство с гибким элементом питателя, закрепленным на основании, обш,ий вид; на фиг. 2 - то же
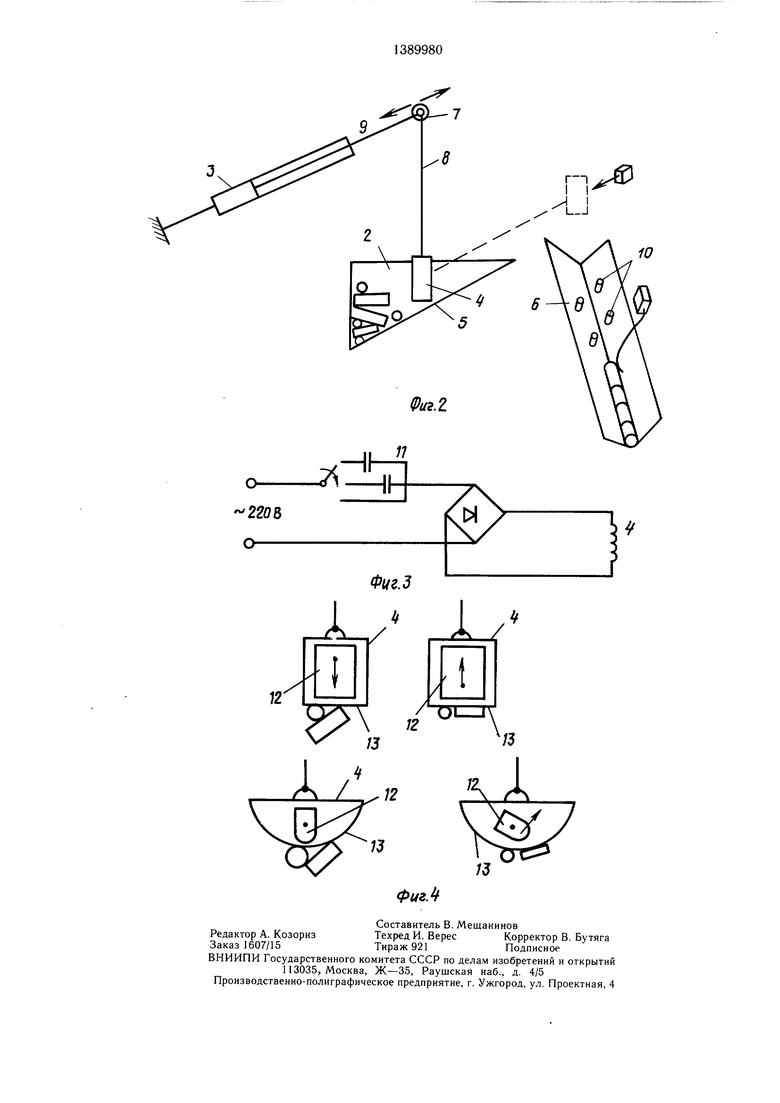
основании 1, а средней частью перекинутым через блок 7, установленный на каретке, а в другом (фиг. 2) - закрепленным на блоке 7 штока 9 гидроцилиндра, расположенного в плоскости, параллельной наклонной боковой стенке 5 бункера 2.
В зоне отводящего лотка 6 детали сбрасываются. Попадая на боковые стенки V-об- разного лотка б и взаимодействуя с его
1-5
25
30
С гибким элементом питателя, закрепленным О упорами 10, размеш,енными в шахматном на штоке питателя; на фиг. 3 - схема управления магнитным захватом; на фиг. 4 - различные формы магнитных захватов с изменяющейся силой притяжения деталей.
Устройство для подачи деталей содержит основание 1, бункер 2, питатель 3 с магнитным захватом 4, установленным с возможностью возвратно-поступательного пе ремещения в плоскости, параллельной одной из боковых стенок 5 бункера 2, которая выполнена наклонной, и отводящий лоток 6. 20 регулируемым.
В одном случае (фиг. 1) питатель 3 вы-При необходимости угол наклона траекполнен в виде каретки с блоком 7 и гибкого элемента 8 с магнитным захватом 4 на одном из его концов. Другой конец гибкого элемента 8 закреплен на основании 1, а средняя часть связана с блоком 7 каретки, установленной с возможностью горизонтального возвратно-поступательного перемещения по основанию 1.
В другом случае (фиг. 2) питатель 3 выполнен в виде гидроцилиндра, на штоке 9 которого закреплен блок 7 с гибким элементом 8 и магнитным захватом 4. Гидроцилиндр размещен в плоскости, параллельной наклонной боковой стенке 5 бункера 2. Отводящий лоток 6 имеет V-образную захватом, причем последний установлен с форму и на боковых стенках его разме- -. возможностью возвратно-поступательного пе- щены упоры 10 в шахматном порядке. ремещения в плоскости, параллельной одной Магнитный захват 4 выполнен с возмож- из боковых стенок бункера, которая вы- ностью изменения силы притяжения дета- полнена наклонной.
лей либо при помощи переключателя 11 в2. Устройство по п. 1, отличающееся
схеме управления электромагнитом (фиг. 3), тем, что гибкий элемент закреплен одним либо изменением его формы путем пере- 40 концом на основании, а средней частью мещения постоянных магнитов 12 относи- связан с блоком.
3.Устройство по п. 1, отличающееся тем, что гибкий элемент закреплен одним концом на блоке питателя, причем послед- Детали навалом размещаются в бунке- ний размещен в плоскости, параллельной
ре 2. При включении питателя 3 маг- плоскости наклона боковой стенки бункера.
4.Устройство по п. 1-3, отличающееся тем, что отводящий лоток выполнен V-об- разной формы и снабжен упорами, размещенными в шахматном порядке на его боуказанное движение питателя 3 обуслов- Q ковых стенках, а магнитный захват выпол- лено гибким элементом 8, в одном случае нен с возможностью, регулировки силы при- (фиг. 1 закрепленным одним концом на тяжения деталей.
порядке, неправильно ориентированные детали, получая вращательный момент, занимают строго данное положение вдоль лотка 6. В этом положении они поступают на операцию обработки.
После разгрузки питатель 3 возвращается в исходное левое положение (фиг. 1 и 2) за последующей партией деталей. Для оптимальной загрузки питателя 3 деталями магнитный захват 4 выполняется
тории перемещения магнитного захвата 4 может быть изменен путем замены блока 7 на каретке питателя 3 полиспастом.
Формула изобретения
1. Устройство для подачи деталей, содержащее основание, бункер, питатель с магнитным захватом и отводящий лоток, отличающееся тем, что с целью повышения надежности работы за счет сокращения числа приводных механизмов, питатель снабжен блоком и гибким элементом с закрепленным на одном конце его магнитным
тельно рабочей плоскости 13 захвата деталей.
Устройство работает следующим образом.
нитный захват 4 притягивает к себе группу деталей и при помощи питателя 3 перемещает их в верхнее правое положение (фиг. 1) и 2), одновременно поднимая их
основании 1, а средней частью перекинутым через блок 7, установленный на каретке, а в другом (фиг. 2) - закрепленным на блоке 7 штока 9 гидроцилиндра, расположенного в плоскости, параллельной наклонной боковой стенке 5 бункера 2.
В зоне отводящего лотка 6 детали сбрасываются. Попадая на боковые стенки V-об- разного лотка б и взаимодействуя с его
упорами 10, размеш,енными в шахматном
упорами 10, размеш,енными в шахматном
регулируемым.
порядке, неправильно ориентированные детали, получая вращательный момент, занимают строго данное положение вдоль лотка 6. В этом положении они поступают на операцию обработки.
После разгрузки питатель 3 возвращается в исходное левое положение (фиг. 1 и 2) за последующей партией деталей. Для оптимальной загрузки питателя 3 деталями магнитный захват 4 выполняется
5
0
При необходимости угол наклона траекзахватом, причем последний установлен с . возможностью возвратно-поступательного пе- ремещения в плоскости, параллельной одной из боковых стенок бункера, которая вы- полнена наклонной.
тории перемещения магнитного захвата 4 может быть изменен путем замены блока 7 на каретке питателя 3 полиспастом.
Формула изобретения
1. Устройство для подачи деталей, содержащее основание, бункер, питатель с магнитным захватом и отводящий лоток, отличающееся тем, что с целью повышения надежности работы за счет сокращения числа приводных механизмов, питатель снабжен блоком и гибким элементом с закрепленным на одном конце его магнитным
п
10
(Pus.Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и разгрузки токарного многошпиндельного станка | 1986 |
|
SU1340976A1 |
| Загрузочное устройство | 1986 |
|
SU1373523A1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU459324A1 |
| Загрузочное устройство | 1991 |
|
SU1814607A3 |
| Загрузочное устройство | 1990 |
|
SU1775270A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ И ОРИЕНТАЦИИ ИЗДЕЛИЙ | 1991 |
|
RU2015092C1 |
| Загрузочное устройство | 1985 |
|
SU1316785A1 |
| Способ ориентирования деталей с выемкой на одном из торцев и устройство для его осуществления | 1987 |
|
SU1691057A1 |
| Резьбонакатной станок | 1989 |
|
SU1680424A1 |
| Бункерное загрузочно - ориентирующее устройство | 1988 |
|
SU1583250A1 |
Изобретение относится к машиностроению и может быть использовано для подачи деталей из навала в технологическое оборудование различного назначения. Целью изобретения является повышение надежности работы за счет сокраш,ения числа приводных механизмов. Для этого магнитный захват 4 устанавливается с возможностью возвратно-поступательного перемеще ния в плоскости, параллельной наклонной боковой стенке 5 бункера 2, заполненного деталями, расположенными навалом. Указанное движение питателя 3 в одном случае получено при помош.и каретки с блоком 7, установленной на основании 1 с возможностью горизонтального возвратно- поступательного перемещения, и гибкого элемента 8, одним концом закрепленного на основании 1, а средней частью связанного с блоком 7 каретки, а в другом случае - при помош,и гидроцилиндра, на штоке которого закреплен блок 7 с гибким элементом 8 и магнитным захватом 4, причем гидроцилиндр установлен в плоскости, параллельной наклонной боковой стенке 5 бункера 2. В отводяш,ем лотке 6 детали, собранные с магнитного захвата, попадая на его боковые стенки и взаимодействуя с упорами 10, получают вра- шательный момент, ориентируясь вдоль продольной оси лотка 6. Для оптимальной загоузки питателя 3 магнитный захват 4 выполняется с возможностью силы притяжения деталей. 3 з. п. ф-лы, 4 ил. с (Л
Составитель В. Мещанинов
Редактор А. КозоризТехред И. ВересКорректор В. Бутяга
Заказ 1607/15Тираж 921Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственио-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
12
Ul1
я
V
/J
Фиг.
| Устройство для подачи длинномерных деталей | 1983 |
|
SU1144838A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
