со
Фм.;
Изобретение относится к устройствам контроля положения перемещаемого груза, например, на конвейере, управляемом перемещаемым грузом, и может быть использовано для регулирования совместной работы различньк элементов транспортно-технологической системы.
Цель изобретения - повышение надежности работы устройства.
На фиг. 1 изображено предлагаемое устройство, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез В-Б на фиг. 1; на фиг.4 - устройство при отклоненном положении щупа.
Устройство контроля положения пе- ремещаемого груза содержит корпус 1, на котором закреплен бесконтактный датчик 2 таким образом, что его рабочая щель размещена внутри корпуса 1. В последнем в подшипнике 3 скольжения установлен с возможностью враще ния передаточный элемент в виде втул ки 4, передающий перемещение от взаимодействующего с грузом щупа 5 экрану 6, взаимодействующему с бесконтактным датчиком 2. Экран 6 может быть выполнен в виде вилки (при нормально открытом исполнении) или в виде пластины (при нормально закрытом исполнении). В полости втулки с обоих концов выполнена резьба для взаимодействия с крепежными элементами 7 и 8. Щуп 5 выполнен из проволоки круглого сечения и изогнут в одной плоскости в виде вилки, а на прижимной планке 9 выполнены прямолинейные углубления, взаимодействующие с ветвями вилки для удобства регулировани длины вылета щупа, и надежного его закрепления.
Экран 6 закреплен на другом конце втулки 4, причем этот конец оснащен цанговыми лепестками с внутренней конической и наружной цилиндрической поверхностями. На наружной поверхности установлен экран 6, неподвижно закрепленный на кольце 10. Крепежный . резьбовой элемент 8 установлен во втулке 11 с конической поверхностью, взаимодействующей с внутренней поверхностью цанговых лепестков втулки 4. Втулка 11 закреплена гайкой 12
Втулка 4 выполнена со сквозным диаметральным отверстием, расположенным перпендикулярно оси поворота в средней части длины втулки. В этом
10
20
25
отверстии размещен палец 13 с возможностью свободного осевого перемещения. Длина цилиндрической поверхности скольжения пальца несколько превышает диаметр втулки для обеспечения его свободного перемещения под воздействием разницы усилий пружин 14 и 15 растяжения. Пружины 14 и 15 прикреплены к противоположным концам пальца 13 и имеют одинаковые геометрические и функциональные параметры.Другие концы пружин 14и15 закреплены на корпусе 1 . В исходном положении оси пружин 14 15 и 15 и пальца 13 образуют прямую линию, проходящую через ось поворота втул- ки 4 в плоскости, перпендикулярной той же оси. Палец 13, пружины 14 и 15 являются элементами приспособления для возврата щупа и экрана в исходное положение.
Вместо пружин растяжения возможна установка пружин сжатия путем размещения каждой из них на шарнирно прикрепленных к пальцу 13 осях, несущих подвижные кронштейны, шарнирно закрепленные на корпусе 1. Условие образования пружинами и пальцем выше описанной прямой должно при этом сохраняться.
Устройство работает следующим об- разом.
Устройство устанавливают на раме конвейера так, что щуп 5 находится в зоне перемещения груза. Груз, проходя по конвейеру с любой стороны уст ройства, отклоняет щуп 5 на некоторый угол, поворачивая втулку вокруг своей оси. Вместе с втулкой 4 поворачиваются на тот же угол экран 6 и палец 13. Пружины 14 и 15 деформируются. При прекращении воздействия на щуп 5 пружины 14 и 15 возвращают втулку 4 в исходное положение. Палец 13 в процессе работы может перемещаться вдоль оси сквозного отверстия втулки 4.
30
5
0
5
Формула изобретения
Устройство контроля положения перемещаемого груза, включающее взаимодействующий с грузом щуп, закрепленный на поворотном передаточном элементе, выполненном в виде втулки и смонтированном на корпусе, установленный на передаточном элементе зк- ран, взаимодействующий с бесконтактным датчиком, и приспособление для возврата щупа и экрана в исходное
положение, отличающееся тем, что, с целью повьшения надежности работы устройства, поворотный передаточньй элемент выполнен со сквозным, перпендикулярным оси его поворота отверстием, а приспособление для возврата щупа и экрана в ис- ходгЛе положение выполнено в виде подвижно установленного в отверстии
передаточного элемента пальца, длина которого больше диаметра последнего, и двух пружин, соединенных одними концами с корпусом, а другими - с концами пальца и установленных с последним в исходном положении щупа и экрана по одной прямой линии, проходящей через ось поворота передаточного элемента.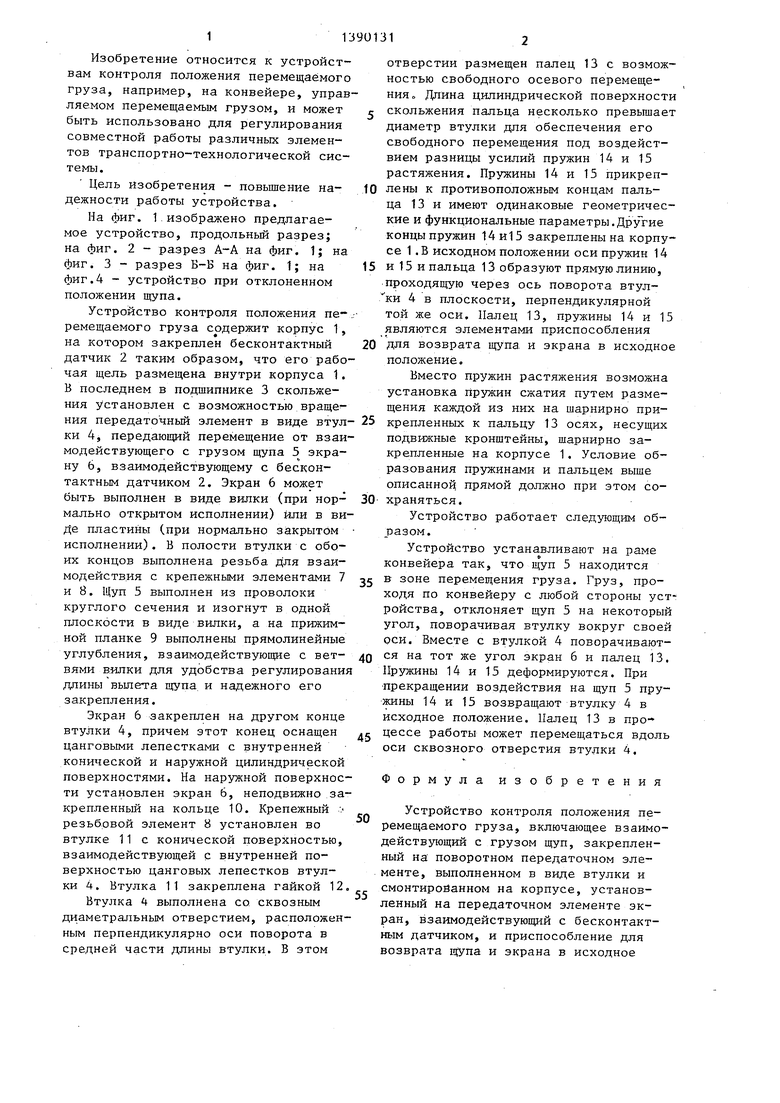
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения перемещаемого груза | 1985 |
|
SU1303513A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство контроля положения перемещаемого груза | 1987 |
|
SU1467004A1 |
| Устройство контроля положения кромки движущегося полотна | 1989 |
|
SU1712291A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Подвесной грузонесущий конвейер | 1986 |
|
SU1406080A1 |
| Цепной конвейер | 1982 |
|
SU1016238A1 |
| Устройство для разгрузки столбиковой садки с печной вагонетки | 1979 |
|
SU854726A1 |
| Автомат для завертки конфет"вперекрутку | 1974 |
|
SU516580A1 |

Изобретение относится кустр-вам контроля положения перемещаемого груза и м.б. использовано для регулирования совместной работы различных элементов транспортно-технологи- ческой системы. Цель изобретения - повышение надежности работы устр-ва. На корпусе (К) 1 установлен бескон- тактньй датчик 2. В подшипнике скольжения 3 в К 1 установлен поворотньш передаточный элемент в виде втулки (В) 4, выполненной со сквозным, перпендикулярным оси ее поворота, от- верстием. При этом В 4 передает перемещение от закрепленного на ней и взаимодействующего с грузом щупа (Щ) 5 экрану 6. Последний закреплен на другом конце В 4. Перпендикулярно оси поворота в средней части длины В 4 выполнено сквозное диаметральное отверстие. В нем с возможностью свободного осевого перемещения установлен палец. Длина последнего больше диаметра В 4. К противоположным концам пальца прикреплены пружины (П) Другие концы П закреплены на К 1. В исходном положении Щ 5 и экрана 6 П и палец установлены по прямой линии, проходящей через ось поворота В 4. Проходящий по конвейеру груз отклоняет Щ 5 на некоторый угол, поворачивая В 4 вокруг оси. При этом экран 6 и палец поворачиваются, а П - деформируются. При прекращении воздействия на Щ 5 груза П возвращают В 4 в исходное положение. 4 ил. 5 сл 00 со
15
| ДАТЧИК ПОЛОЖЕНИЯ МЕХАНИЗМОВ ПОДВЕСНЫХ КОНВЕЙЕРОВ | 1967 |
|
SU222944A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для контроля положения перемещаемого груза | 1985 |
|
SU1303513A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
