1
Изобретение относится к производству огнеупорных изделий для механизации разборки обожженной столбиковой садки и может быть , применено для транспортирования штабелей и штучных грузов, имеющих форму параллелепипеда.
Известно устройство для разборки обожженной столбиковой садки конструкции, содержащее установленную на портале самоходаую тележку с подъемно-опускным щечным захватом Ц.
Существенным недостатком данного устройстоа является то, что не обеспечена автоматическая остановка тепежки с захватом соосно с грузом (столбиком).
Конструкция данного устройства не позволяет производить остановку тележкн по заранее намеченным координатам из-за наличия погрешности установки столбиков на печную вагонетку, деформации столбиков при транспортировании и обжиге и ограниченного зазора между столбиками. Поэтому остановку тележки с захватом соосно со столбиком производит onepa-i тор визуально с пульта управления.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство для перекладки элементов садки сырца-кирпича с конвейеров, идущих от прессов на накопитель, содержащее установленную на портале самоходную тележку с подъемно-опускным щечным захватом и следящее устройстио на портале 2.
Недостатком указанного устройства является то, что снижение скорости движения тележки, необходимое для уменьщения погрещности остановки над столбиком (грузом) производится с учасзием оператора, а остановка - 1олько в заранее намеченном месте.
Цель изобретения - обеспечение автоматической остановки тележки с захватом соосно со столбиком (грузом), находящимся в любом месте по пути движения захвата, и предотвращение самовозврата следящего устройства при подъеме захвата со столбиком.
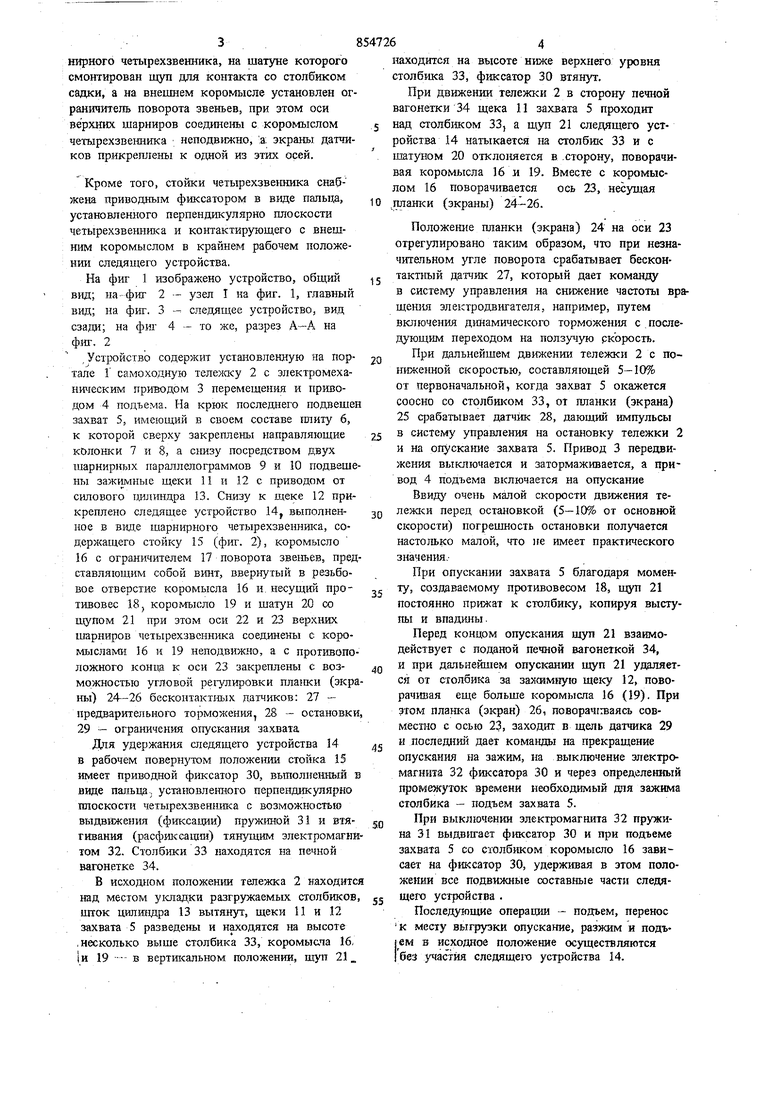
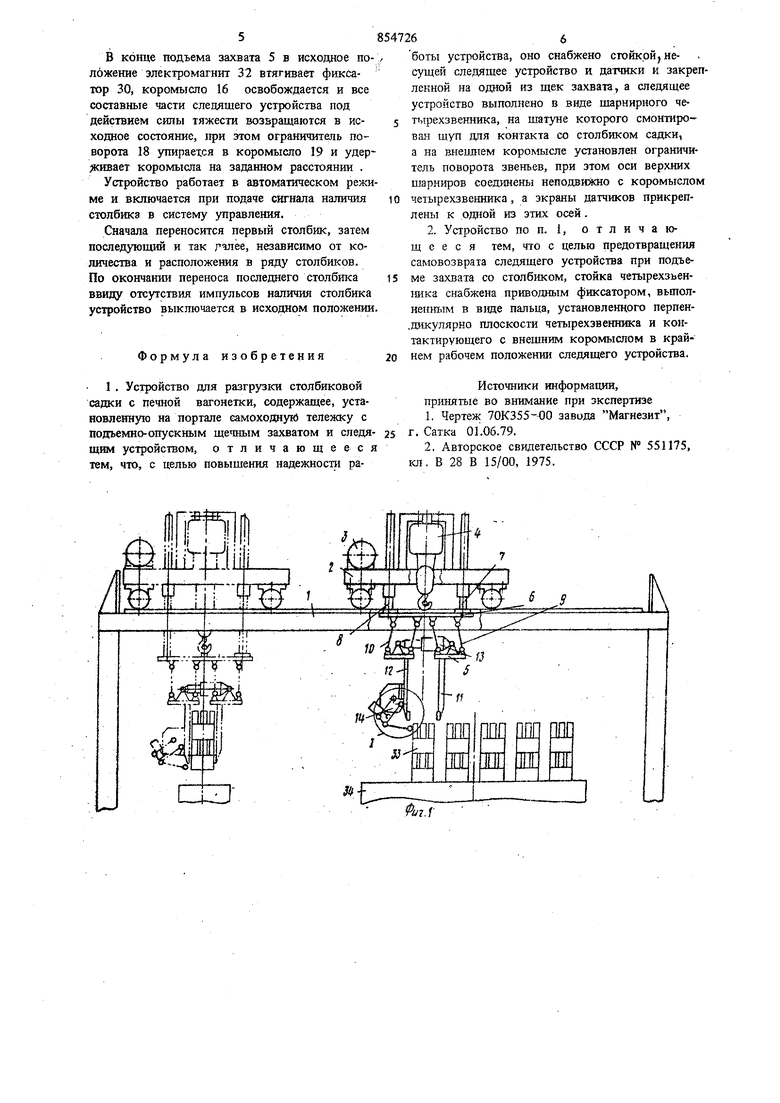
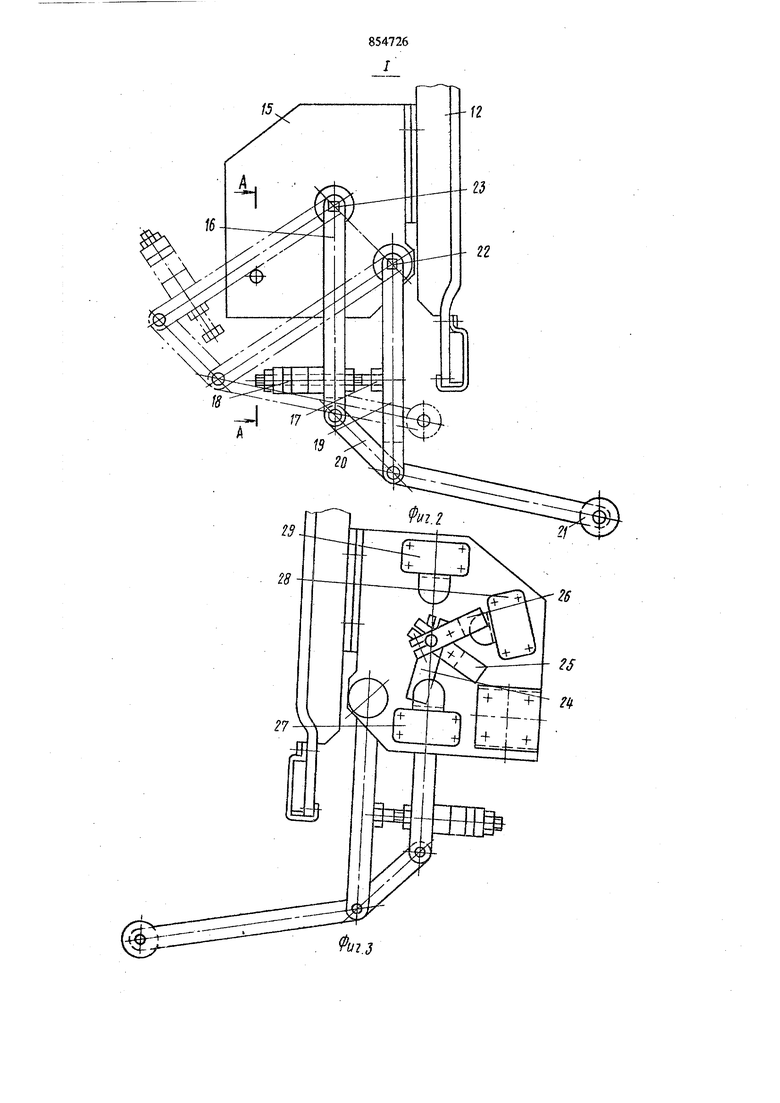
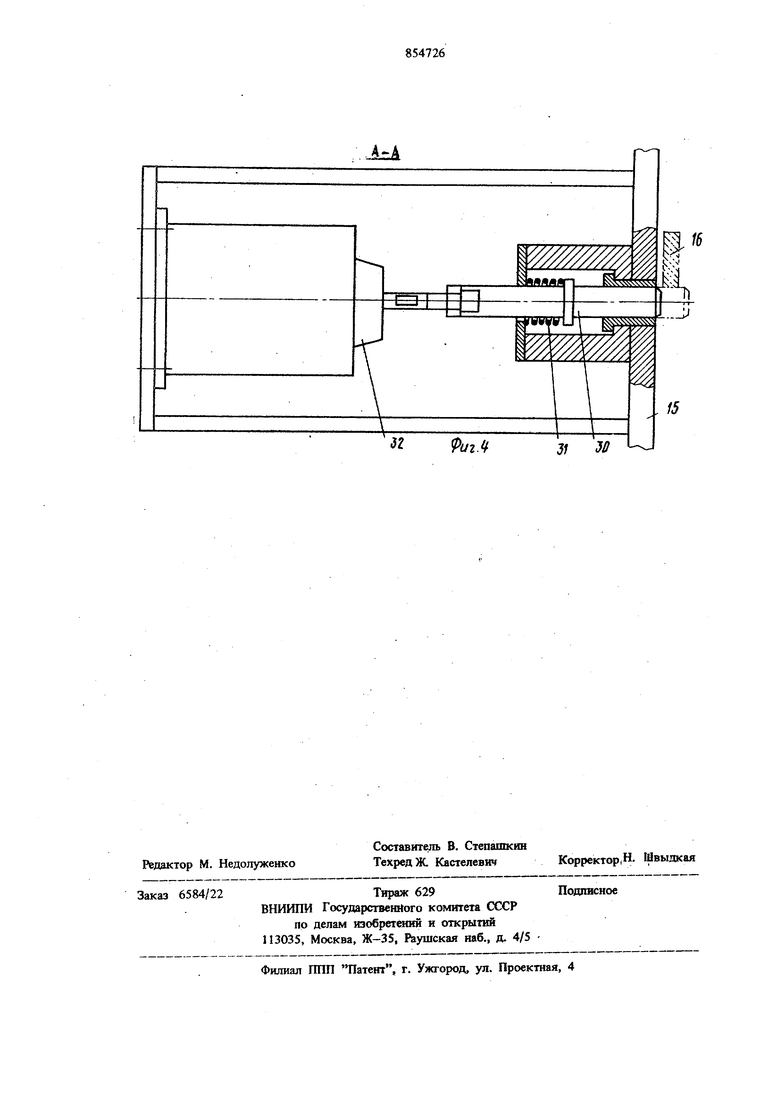
Цель достигается тем, что устройство снабжено стойкой, несущей устройство и датчики и закрепленной на одной из щек захвата, а следящее устройство выполнено в виде шар3mipHoro четырехзвенника, на шатуне которого смонтирован щуп для контакта со столбиком садки, а на внешнем коромысле установлен ог раничитель поворота звеньев, при этом оси верхних шарниров соединены с коромыслом четырехзве1шика неподвижно, а; экраны: датчиков прикреплены к одной из этих осей. Кроме того, стойки четырехзвенника снабжена приводным фиксатором в виде пальца, установленного перпендикулярно плоскости четырехзвенника и контактирующего с внешним коромыслом в крайне / рабочем положении следящего усфойства. На фиг 1 изображено устройство, общий вид; на-фиг 2 - узел I на фиг. 1, главный вид; па фиг. 3 - следящее устройство, ви,Д сзада; на ф.ш- 4 - то же, разрез А-А на фиг. 2 Уст|.юйство содержит установленную на портале Г самоходную телехжу 2 с электромеханическим приводом 3 перемещения и приводом 4 подъема. На крюк последнего подвеше захват 5, в своем составе плиту 6, к которой сверху закреплены направляющие колонки 7 и 8, а С1шзу посредством двух шарнирных параллелограммов 9 и 10 подвеше ны зажимные щеки 11 и 12 с приводом от силового тдалиндра 13. Снизу к идеке 12 прикреплено следящее устройство 14, выполненное в вил.е шарнирного четырехзвенншса, содержащего стойку 15 (фиг. 2), коромысло 16 с ограничителем 17 поворота звеньев, пред ставляющим собой винт, ввернутый в резьбовое отверстие коромысла 16 и, несущий противовес 18, коромысло 19 и шатун 20 со щупом 21 при этом оси 22 и 23 верхних 1парниров четырехзвенника соединены с коромыслами 16 и 19 неподвижно, а с противопо ложного КОН113 к оси 23 закреплены с возможностью угловой регулировки пла5пси (экр ны) 24-26 бесконтактиь Х датчиков: 27 - предварительного торможения, 28 - остановк 29 - ограничения опускания захвата Для удержания следящего устройства 14 в рабочем повернутом положении стойка 15 имеет приводной фиксатор 30, вьшолнеюаш виде пальца, установленного перпендикулярно плоскости четырехзвеняика с возможностью выдвижения (фиксации) пруяашой 31 и втягивания (расфяксащш) тянущим электромагни том 32. Столбики 33 находятся на печной вагонетке 34. В исходном положении тележка 2 находитс над местом укладки разгружаемых столбиков шток щшшщра 13 вытянут, щеки И и 12 захвата 5 разведены и находятся на высоте .несколько выше столбика 33, коромысла 16, 1и 19 - в вертшсапьном положении, щуп 21 аходится на высоте ниже верхнето уровня jonSitiKs. 33, фиксатор 30 втянут. При движении тележки 2 в сторону печной агонетки 34 щека 11 захвата 5 проходит ад столбиком 33, а щзш 21 следящего устойства 14 натыкается на столбшс 33 и с штуНом 20 отклоняется в .сторону, поворачиая коромысла 16 и 19. Вместе с коромысом 16 поворачивается ось 23, несущая планки (экраны) 24-26. Положеш{е планки (экрана) 24 на оси 23 отрегулировано таким образом, что при незначительном угле поворота срабатывает бесконтактный датчик 27, который дает команду в систему управления на снижение частоты вращешш электродвигателя, например, путем включения Д1шамического торможения с , последующим переходом на ползучую скорость. При дальнейщем движении тележки 2 с пониже1шой скоростью, составляющей 5-10% от первоначапьной, когда захват 5 окажется соосно со столбиком 33, от планки (экрана) 25 срабатывает датчик 28, дающий импульсы в систему управления на остановку тележки 2 и на опускание захвата 5. Привод 3 передвижения выключается и затормаживается, а привод 4 подъема включается на опускание Ввиду очень малой скорости движения тележк;и перед остановкой (5-10% от основной скорости) погреишость остановки получается настолько малой, что не имеет практического значения,При опускании захвата 5 благодаря моменту, создаваемому противовесом 18, щуп 21 постоянно прижат к столбику, копируя выступы и впадины. Перед кондом опускания щуп 21 взаимодействует с поданой печной вагонеткой 34, и при дальнейщем опускании щуп 21 удаляется от столбика за зажимную щеку 12, поворачивая еще больще коромыапа 16 (19). При этом планка (экран) 26., поворачглаясь совместно с осью 23, заходит в щель датчика 29 и послеШ1ий дает команды на прекращение опускания на зажим, на выключение электромагнита 32 фиксатора 30 и через определенный промежуток времени необходимый для зажима столбика - подъем захвата 5. При выключении электромагшпа 32 пружина 31 выдветает фиксатор 30 и при подъеме захвата 5 со столбиком коромысло 16 зависает на фиксатор 30, удерживая в этом положении все подвижные составные части следящего устройства . Последующие операции - подаем, перенос к месту выгрузки опускание, разжим и подъ|ем в исходное положение осуществ.пяются без участия следящего устройства 14. в конце подъема захвата 5 в исходное по ложение электромагнит 32 втягивает фиксатор 30, коромысло 16 освобождается и все составные части следящего устройства под действием силы тяжести возвращаются в исходное состояние, при этом ограничитель поворота 18 упирается в коромысло 19 и удер ;ясивает коромысла на заданном расстоянии . Устройство работает в автоматическом режи ме и включается при подаче сигнала наличия столбика в систему управления. Сначала переносится первый столбик, затем последующий и так гэлее, независимо от количества и расположения в ряду столбиков. По окончании переноса последнего столбика ввиду отсутствия импульсов наличия столбика устройство выключается в исходном положении Формула изобретения
1 . Устройство для разгрузки столбиковой садки с печной вагонетки, содержащее, установленную на портале самоходнун) тележку с подъемно-опускным щечным захватом и следящим устройством, отличающееся тем, что, с целью повыщения надежност раИсточники информации, принятые во внимание при экспертизе
1.Чертеж; 70К355-00 завода Магнезит, г. Сатка 01.06.79.
2.Авторское свидетельство СССР № 551175, кл, В 28 В 15/00, 1975. 66 боты устройства, оно снабжено стойкой, несущей следящее устройство и датчики и закрепленной на одной из щек захвата, а следящее устройство выполнено в виде щарнирного чеТ1 1рехзвенника, на щатуне которого смонтиро-ван щуп для контакта со столбиком садки, а на внеилтем коромысле установлен ограничитель поворота звеньев, при этом оси верхних шарниров соединены неподвижно с коромыслом четырехзвениика , а экраны датчиков прикреплены к одной из этих осей. 2. Устройство по п. I, отличающееся тем, что с целью предотвращения самовозврата следящего устройства при подъеме захвата со столбиком, стойка четырехзьенmiKa снабжена приводным фиксатором, вьшолненташ в виде пальца, установленного перпен.дикулярно плоскости четырехзвенника и контактирующего с внещним коромыслом в крайнем рабочем положении следящего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Автомат для садки кирпича на печные вагонетки | 1978 |
|
SU766864A1 |
| Устройство для укладки огнеупорныхиздЕлий HA пЕчНОй ВАгОН | 1978 |
|
SU814758A1 |
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| Устройство для механизированной разборки столбиков огнеупорных изделий | 1981 |
|
SU1011381A1 |
| Автомат для садки кирпича на печные вагонетки | 1983 |
|
SU1104023A1 |
| Устройство для переноса слоя кирпича на печную вагонетку | 1990 |
|
SU1787790A1 |
| Устройство для съема и укладки столбиков огнеупорных изделий | 1982 |
|
SU1074728A2 |
| Устройство для съема кирпича сырца с пресса и формирования столбиковой садки | 1977 |
|
SU701811A1 |
| Устройство для многостолбиковой укладки кирпича-сырца | 1978 |
|
SU770801A1 |
/ 31 УО
