(21)4168846/29-11
(22)27.10.86
(46) 23.04.88. Бюл. № 15
(71)Конструкторско-технологическое бюро Стройиндустрия
(72)В.Е.Петрачков, О.В.Гуляев и О.А.Хаджаев
(53)621.86.061(088.8)
(56)Авторское свидетельство СССР № 264650, кл. В 66 С 1/28, 1967,
(54)ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
(57)Изобретение относится к грузозахватным устройствам. Цель изобретения - расширение номенклатуры захватываемых грузов путем обеспечения захвата грузов с радиусной вйешней поверхностью.Устройство содержит раму 1, в которой с возможностью поворота относительно своих осей установлены вертикальные штанги 2, на нижних торцах которых жестко на пересечении
биссектрис или медиан установлены захватные лапы 3, вьтолненные в форме равнобедренного тупоугольного треугольника с закругленными углами и вогнутым основанием. Управление поворотом штанг 2 осуществляется механизмом 4 управления. Вертикальные штанги 2 с захватными лапами 3, находящимися .-в исходном положении, вводят в межксльдевое пространство колец ; 5 и 6,. причем верхние поверхности захватных лап 3 устанавливают несколько ниже нижних поверхностей поддонов 7 и 8. Повернув механизмом 4 управления штанги 2 на определенный угол, устанавливают положение захватных лап, необходимое для захвата ; изделия, после чего последнее поднимают. Освобождение изделия от грузозахватного устройства осуществляют в обратной последовательности. 5 ил.
I
(Л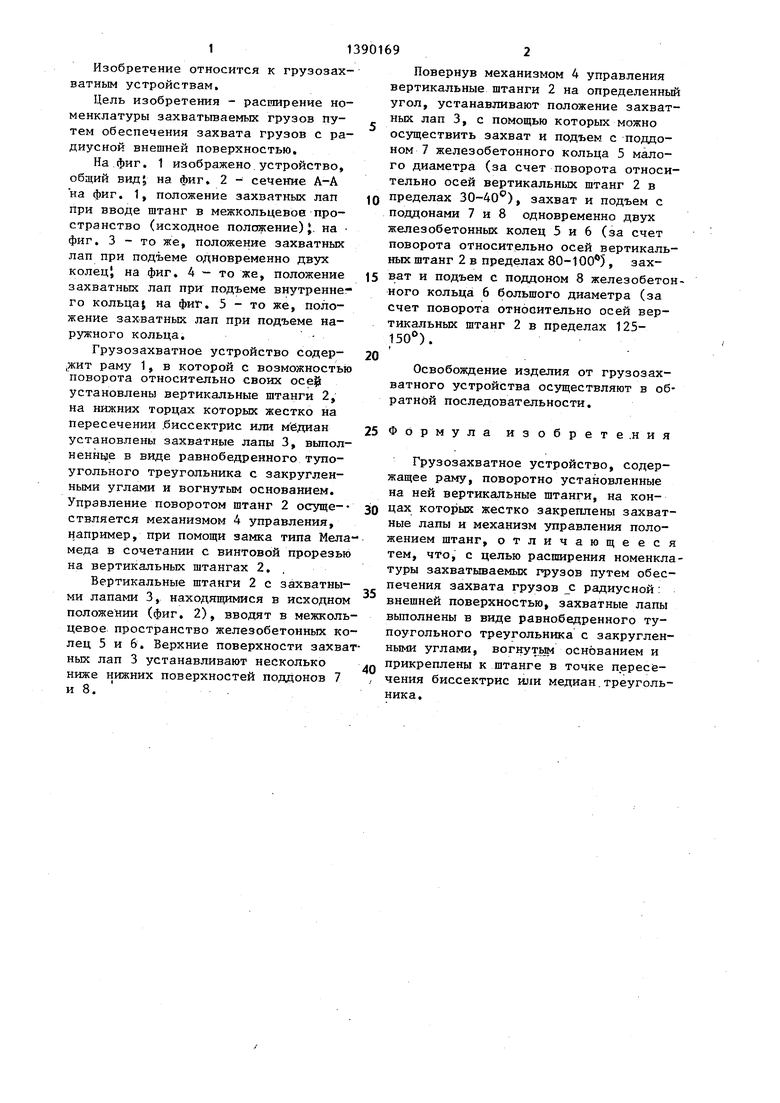
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1979 |
|
SU867842A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С АВТОМАТИЧЕСКИМ | 1973 |
|
SU381597A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Автоматический клещевой захват | 1980 |
|
SU925838A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |


.J
Изобретение относится к грузозахватным устройствам.
Цель изобретения - расширение номенклатуры захватьгоаемых грузов путем обеспечения захвата грузов с радиусной внешней поверхностью.
На фиг. 1 изображено устройство, общий вид на фиг, 2 - селение А-А на фиг, 1, положение захватных лап при вводе штанг в межкольцевов пространство (исходное положение) J. на фиг. 3 - то же, положение захватных лап при подъеме одновременно двух колецJ на фиг, 4 - то же, положение захватных лап при подъеме внутреннего кольца} на фиг, 5 - то же, положение захватных лап при подъеме наружного кольца, Грузозахватное устройство содер- ,жит раму 1, в которой с возможностью поворота относительно своих осе$ установлены вертикальные штанги 2, на нижних торцах которых жестко на пересечении .биссектрис или м ёдиан установлены захватные лапы 3, выполненные в виде равнобедренного тупоугольного треугольника с закругленными углами и вогнутым основанием. Управление поворотом штанг 2 осуще-- ствляется механизмом 4 управления, 1 апример, при помощи замка типа Мела меда в сочетании с винтовой прорезью на вертикальных штангах 2, ,
Вертикальные штанги 2 с захватными лапами 3, находящимися в исходном положении (фиг, 2), вводят в межкольцевое пространство железобетонных колец 5 и 6, Верхние поверхности захва ньк лап 3 устанавливают несколько ниже нижних поверхностей поддонов 7 и 8,
Повернув механизмом 4 управления вертикальные штанги 2 на определенньй угол, устанавливают положение захватных лап 3, с помощью которых можно осуществить захват и подъем с поддоном 7 железобетонного кольца 5 малого диаметра (за счет поворота относительно осей вертикальных штанг 2 в
пределах 30-40), захват и подъем с поддонами 7 и 8 одновременно двух железобетонных колец 5 и 6 (за счет поворота относительно осей вертикальных штанг 2 в пределах 80-100 5, захват и подъем с поддоном 8 железобетонного кольца 6 большого диаметра (за счет поворота относительно осей вертикальных штанг 2 в пределах 125- 150).
Освобождение изделия от грузозахватного устройства осуществляют в обратной последовательности,
Формула изобрете.ния
Грузозахватное устройство, содержащее раму, поворотно установленные на ней вертикальные штанги, на кон- цах которых жестко закреплены захватные лапы и механизм управления положением штанг, отличающееся тем, что, с целью расширения номенклатуры захватываемых грузов путем обеспечения захвата грузов с радиусной: внешней поверхностью, захватные лапы выполнены в виде равнобедренного тупоугольного треугольника с закругленными углами, вогнутьм основанием и прикреплены к штанге в точке nepecis- чения биссектрис или медиан.треугольника.
ФигЛ
f(
