(Л
со со ел 4;; со
в if
Изобретение относится к машиностроению, в частности к устройствам для переноса с поворотом изделий с одной позиции на другую в технологических линиях механообработки.
Целью изобретения является эко . номия электроэнергии за счет использования потенциальной энергии поворотных рычагов и изде,пия на части траектории их перемещения.
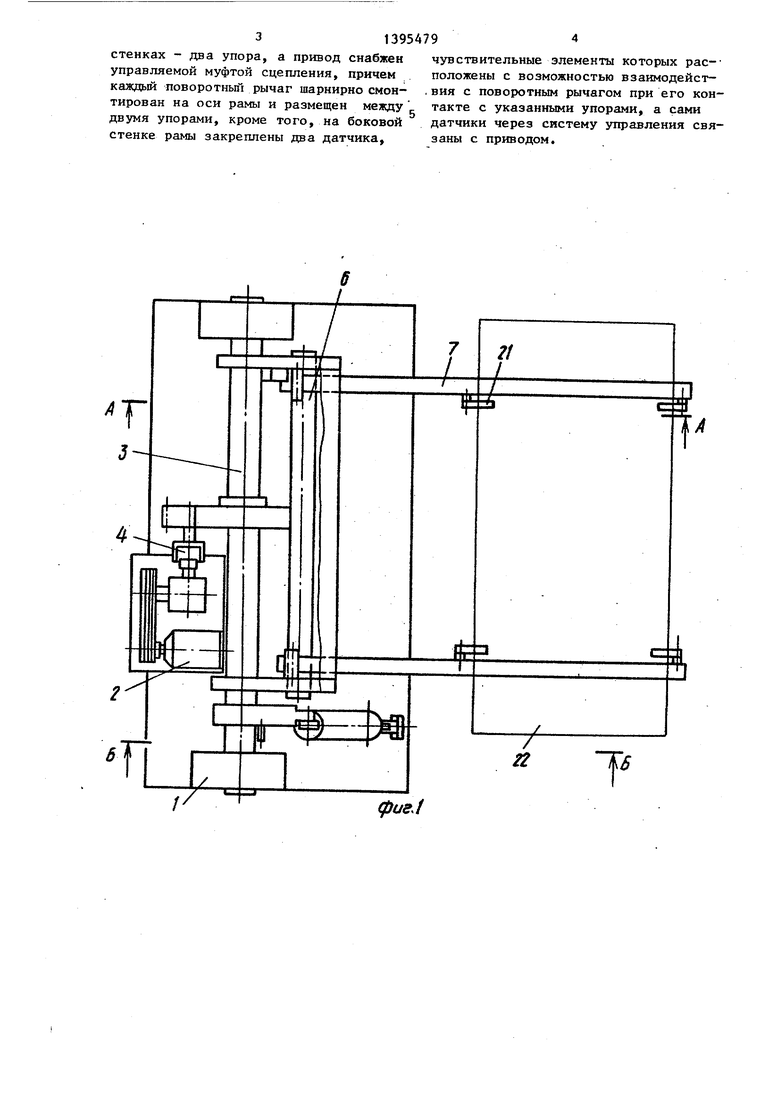
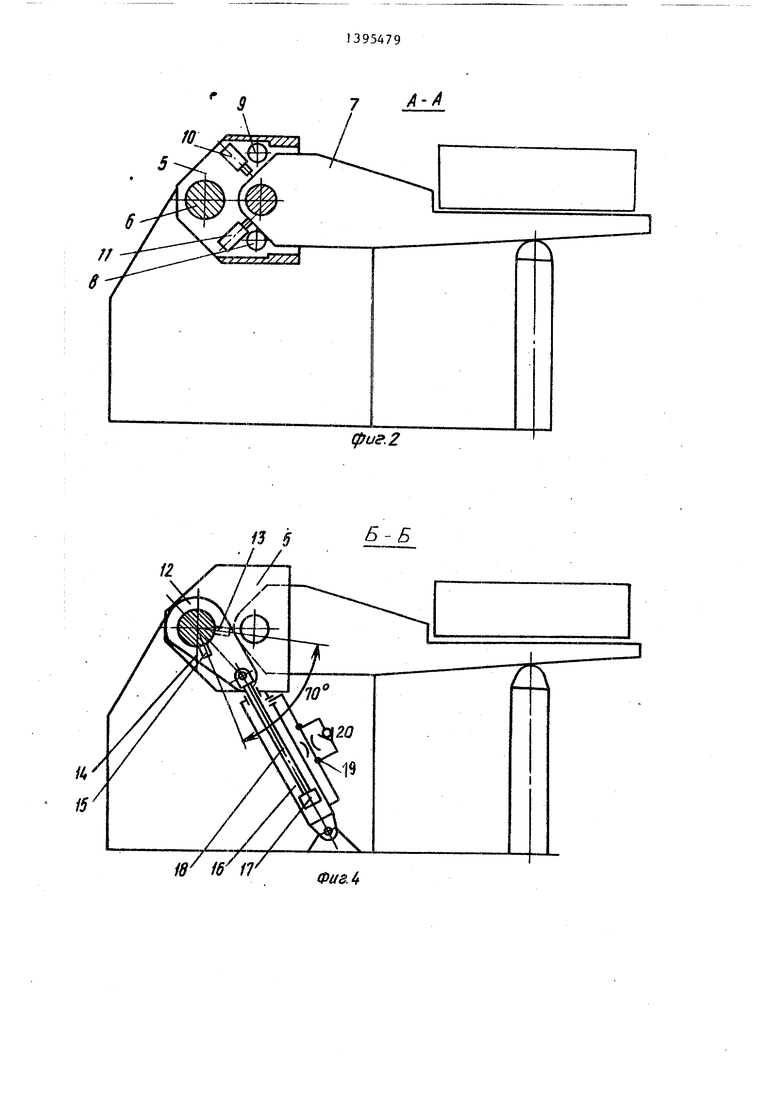
На фиг.1 показан кантователь,план 1на фиг.2 - разрез А-А на фиг.1, на иг.З - то же, при верхнем положе- 1НИИ поворотных рычагов, на фиг.4 - |разрез Б-Б на фиг.1, на фиг.5 - раз- |рез А-А на фиг.1 (при повернутом по- ожении рычагов).
I Кантователь содер}кит основание 1 |привод 2, кинематически связанный с приводом вал 3, упршзляемую муфту 4 |сцепления и закрепленную на валу ра- МУ 5, в которой на оси 6 шарнирно смонтированы поворотные рычаги 7 и стко закреплены ограничивающие поворот этих рычагов упоры 8 и 9, а ;Также установлены датчики 10 и 11. |На валу 3 с возможностью поворота размещен кривошип 12 с упорами 13 и 14 и жестко закреплен поводок 15. Силовой цилиндр 16 с поршнем 17, штоком 18, дросселем 19 и обратным клапаном 20 шарнирно закреплен на основании кантователя, причем его шток шарнирно связан с кривошипом 12. В конструкцию кантователя входят зажимы 21 для закрепления транспортируемого изделия 22,
Кантователь работает следующим образом.
После закрепления изделия 22 на поворотных рычагах 7 зажимами 21 включается привод 2, который через муфту 4 вращает вал 3, одновременно с которым начинает поворачиваться рама 5 с рычагами 7 и изделием 22, при этом рычаги 7 своей опорной поверхностью прижимаются к упору 8 и составляют единое целое с кантующей рамой (фиг,2).
Кривошип 12 в начале поворота рамы 5 неподвижен (фиг.4). Когда изделие повернется на угол 70 , поводок 15 подходит к упору 1-3 и далее начинает поворачивать кривошип 12, при этом поршень 17 со штоком 18 начинает перемещаться вверх и вытеснять рабочее тело из верхней полости цилиндра 16 в нижнюю через дроссель 19. После прохождения центром тяжести рычагов 7 с изделием 22 поло жения равновесия (фиг.З) создается , Момент, поворачивающий рычаги 7 с изделием относительно оси 6, при котором опорные поверхности этих ры- |Чагов отрьшаются от упора 8, рычаги 1вместе с изделием поворачиваются на
0 УГОЛ 2 - 3° и доходят до упора 9, при этом датчик 10 отключает двигатель и электромагнитную муфту. Далее под действием веса рычагов 7 с изделием 22 рама 5 продолжает поворот и
5 опускает изделие (фиг.5). В этом положении изделие 22 освобождается от зажимов 21.
Из нижнего положения (фиг„5) привод 2 возвращает рычаги 7 в исходное
0 положение (фиг.4). Вначале вал 3 поворачивает с помощью привода 2 раму 5 и рычаги 7 до положения равновесия, далее под действием веса их опорные поверхности отрываются от
5 упора 9 (фиг.З), совершают поворот на 2 - З и упираются на упор 8, воздействуя на датчик 11, при этом двигатель привода 2 отключается от сети, а электромагнитная муфта 4 разрывает
0 кинематическую цепь, и рама 5 с рычагами 7 опускается под действием собственного веса в исходное положение, при этом в начале возврата рычагов кривошип 12 остается на месте, а далее поводок 15 вала 3 входит во взаимодействие с упором 14, поршень 17 со штоком 18 начинает опускаться, и рабочее тело через обратный клапан 20 перетекает из нижней полости цилинд0 ра 16 в верхнюю, обеспечивая плавное возвращение рычагов 7 в исходное положение .
5
Формула изобретения Кантователь, содержащий основание с ус танов леннЬ1М в нем валом, связанным с кривошипом, поворотные рычаги, взаимодействующие с этим валом, силовой цилиндр, корпус которого шарнирно связан с основанием, а шток - с кривошипом, привод и систему управления, отличающийся тем, что, с целью экономии электроэнергии за счет использования потенциальной энергии поворотных рычагов и изделия на части траектории их перемещения на валу закреплена рама, между боковыми стенками которой параллельно валу расположена ось, а на
стенках - два упора, а привод снабжен управляемой муфтой сцепления, причем каждый поворотньп рычаг шарнирно смонтирован на оси рамы и размещен между , двумя упорами, кроме того, на боковой стенке рамы закреплены два датчика.
чувствительные элементы которых рас- положены с возможностью взаимодействия с поворотным рычагом при его контакте с указанными упорами, а сами датчики через систему управления связаны с приводом.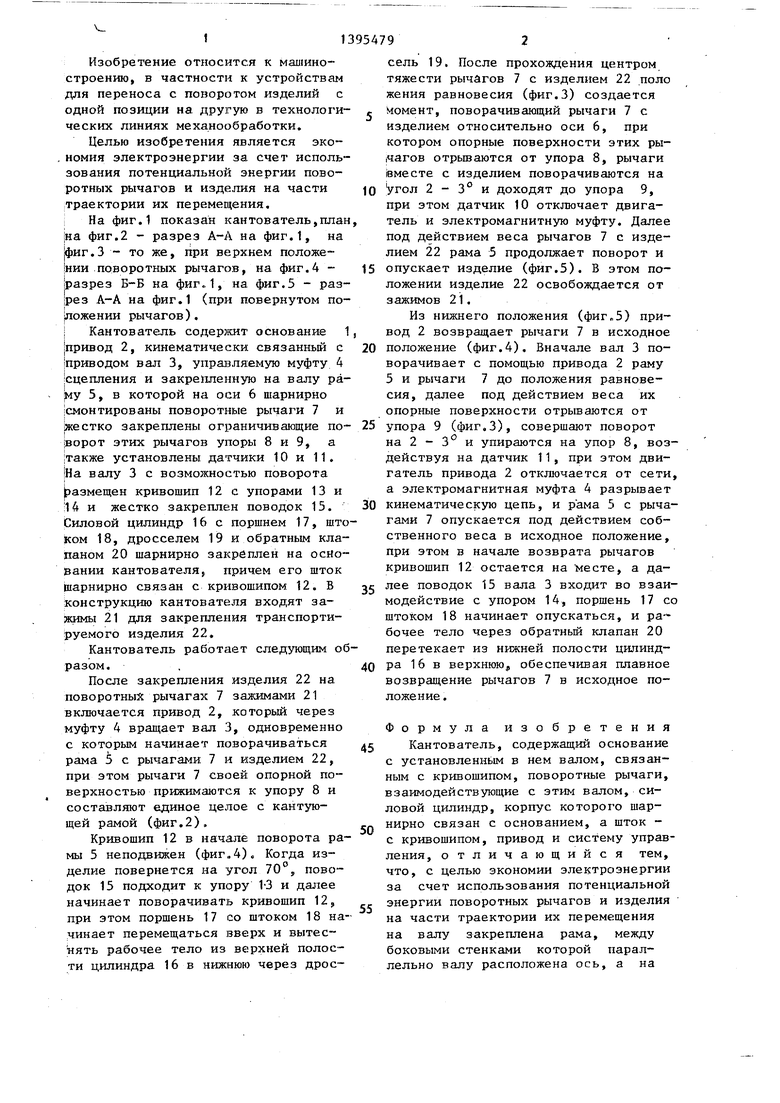
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь | 1986 |
|
SU1407875A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Кантователь | 1983 |
|
SU1131624A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| Кантователь | 1979 |
|
SU804316A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| Колодочный тормоз | 1978 |
|
SU771011A1 |
| Кантователь | 1981 |
|
SU967922A1 |
| Кантователь сводов дуговых печей | 1979 |
|
SU863042A1 |
Изобретение относится к области машиностроения, в частности к устройствам для переноса с .поворотом изделий с одной позиции на другую в технологических линиях механообработки. Целью изобретения является экономия электроэнергии за счет использования потенциальной энергии поворотных ры- чагов и изделия на части траектории- их перемещения. При переходе поворотных рычагов 7 с изделием 22 через вертикальное положение рычаги 7 поворачиваются на угол 2-3 относительно рамы 5, при этом их опорные поверхности отходят от упоров 8 и контактируют с упорами 9. С помощью датчика 10 отключается привод и происходит дальнейшее перемещение изделия 22 с использованием потенциальной энергии перемещаемых масс. 5 ил. с $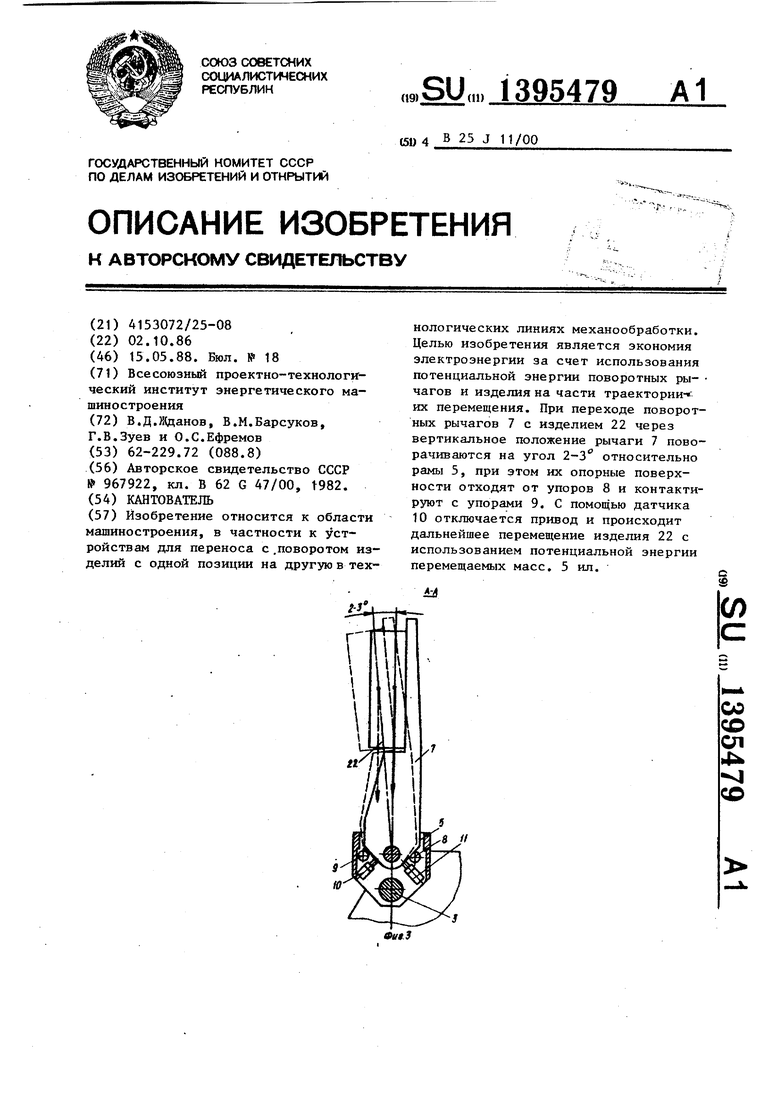
//
/
гг
Т
(
15
,,
/l-/i
фиг. 2
Б-Б
фиг.5
| Кантователь | 1981 |
|
SU967922A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
