сл
l/t
при опускании кантующих рычагов (КР). Кантователь включает смонтированный на основании поворотный от привода вал 3 с жестко закрепленным на нем водилом (в) 4, свободно посаженную кантующую раму 5 с расположенными внутри нее на оси КР 7 и жестко закрепленные с двух сторон оси ограничивающие поворот КР 7 фиксаторы 8,9, управляющие работой привода путевые выключатели 10,11„ Приспособление для стабилизации скорости поворота КР 7 выполнено в виде кривошипа (КШ) С упорами, взаимодействующего с ним поводка и шарнирно соединенного с КШ силового цилиндра, полости которого соединены через дроссель и об7875
ратный клапан. Поводок и Kill соответственно свободно и жестко связаны с рамой 5. При этом КР 7 установлены с возможностью свободного качания между фиксаторами 8,9 на угол 2-3 и взаимодействия с противоположными от воздействия на них В Д сторонами. После закрепления детали на КР 7 включают привод. При этом вал 3 поворачивается с В А и последнее входит в зацепление с фиксатором 8 рамы 5, заставляя ее поворачиваться. После поворота детали на 70 поводок поворачивает КШ, при этом за счет дросселирования жидкости в цилиндре деталь перемещается медленно, без динамических перегрузоко 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь | 1981 |
|
SU967922A1 |
| Кантователь | 1986 |
|
SU1395479A1 |
| Рычажный кантователь | 1987 |
|
SU1440654A1 |
| Кантователь | 1979 |
|
SU804316A1 |
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| Кантователь | 1979 |
|
SU829380A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| Линия для расфасовки жидкостей в бочки | 1974 |
|
SU520326A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| Кантователь листов | 1986 |
|
SU1400837A1 |

Изобретение относится к устр-вам для манипулирования изделиями, конструктивно сопряженными с конвейерами, а именно к устр-вам для кантования крупногабаритных корпусных деталей, и предназначено, в частности, для сборки деталеустановок на гибких автоматизированных производствах.Цель - повышение надежности и увеличение долговечности работы кантователя путем обеспечения разгрузки кантователя от силового воздействия привода
.-
1
Изобретение относится к устройствам для манипулирования изделиями, конструктивно сопряженными с конвейерами, а именно к устройствам для кантования крупногабаритных корпусны деталей, и предназначено для переноса изделий с одной позиции на другую в технологических линиях механической обработки, в частности для сборки деталеустановок на гибких автома тизированных производствах
Цель изобретения - повыщение надежности и увеличение долговачности работы кантователя путем обеспечения разгрузки кантователя от силового воздействия привода при опускании кантующих рычагов о
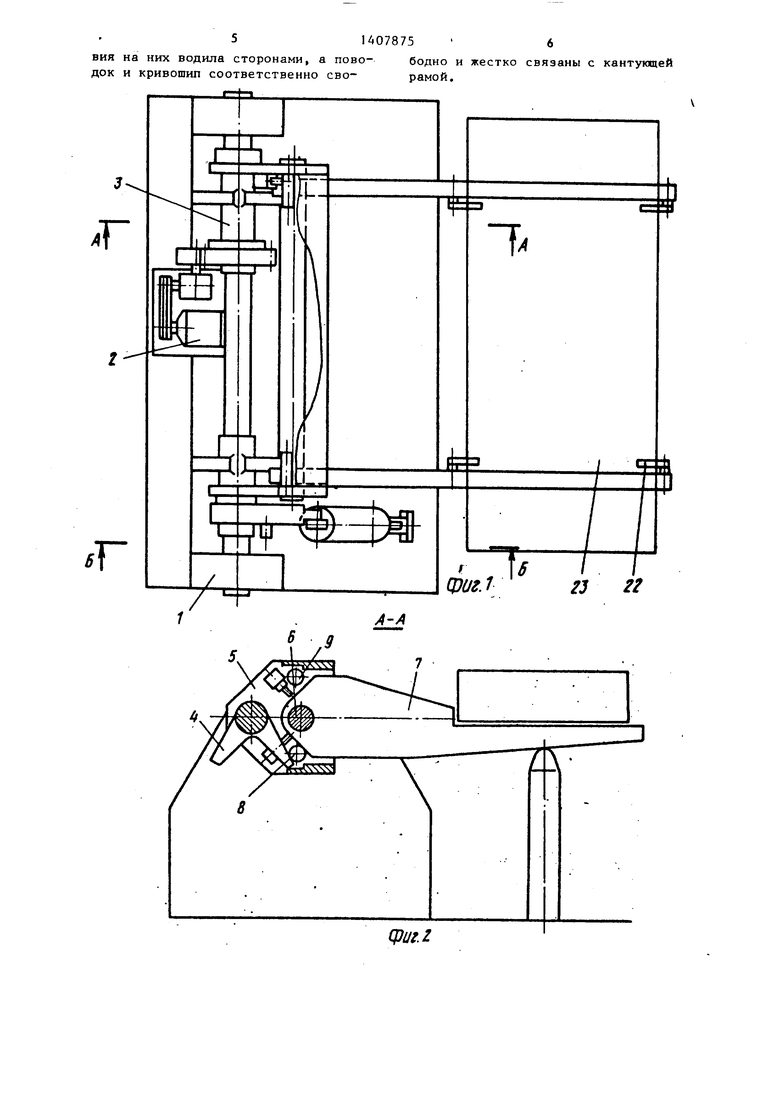
На фиг, показан кантователь, вид сверху; на фиг„ 2 - разрез А-А на фиг„1; на фиге 3 - то же, при верхнем положении кантующих рычагов; на фиг, 4 - разрез Б-Б на фиг Л; на фиг, 5 - разрез А-А на фиг„1, при нижнем положении кантующих рычагов
Кантователь содержит основание 1, привод 2, поворотный от привода вал 3 с жестко закрепленным на нем водилом 4 и свободно посаженную на валу кантующую раму 5, внутри которой на оси 6 расположены кантующие рычаги 7 и жестко закрепленные с двух сторон оси 6, ограничивающие поворот кантующих рычагов фиксаторы В и 9,
0
5
5
5
0
а также путевые выключатели 10 и 11, управляющие работой привода 2, Приспособление для стабилизации скорости поворота рычагов 7 выполнено в виде свободно посаженного на цапфу 12 кантующей рамы 5 кривошипа 13 с упорами 14 и 15, жестко закрепленного на цапфе 12 поводка 16 и силового цилиндра 17 с поршнем 18, щтоком 19 и соединяющими его полости дросселем 20 и обратным клапаном 21„ Силовой цилиндр 17 щариирно закреплен на основании 1 кантователя.
В конструкцию кантователя входят зажимы 22 для закрепления транспортируемого изделия 23
Рчантователь работает следующим образом.
После закрепления изделия 23 на кантующих рычагах 7 зажимами 22 включается привод 2 и посредством силовой передачи медленно вращает поворотный вал 3, При этом водило 4 начинает поворачиваться вместе с поворотньм валом 3, входит в зацепление с ог{заничительным фиксатором 8 кантующей рамы 5 и заставляет ее поворачиваться вместе с кантующими рычагами 7 и изделием 23, при этом кантующие рычаги 7 с изделием 23 за счет плеча момента центра тяжести своей опорной поверхностью прижис изделием 23 (фиг.З) начинамаются к ограничительному фиксатору 8 и составляют единое целое с кантующей рамой 5 (фиг.2).
Кривошип при повороте свободно посажен на цапфу 12 кантующей рамы 5 и с момента начала поворота ее до угла 70 неподвижен. Когда изделие поворачивается на угол 70°, поводок 16 подходит к упору U и, воздействуя на него при дальнейшем повороте, начинает поворачивать кривошип 13 одновременно с поворотом изделия, при этом порщеиь 18 со штоком 19 начинает подниматься вверх и выдавливать масло из верхней полости цилиндра 17 в нижнюю через дроссель 20 Дросселирование жидкости обеспечивается весом изделия и регулировкой проходного сечения дросселя и способствует медленному подъему и опусканию изделие без динамических перегрузок как в случае подъема от привода, так и в случае самопроизвольного опускания изделия под собственным весом.
После прохождения центром тяжести (саитующих рычагов 7 /толожения равновесия ртся смещение центра тяжести в обратную сторону и создается момент центра тяжести, поворачивающий кантующие рычаги 7 с изделием 23 относительно оси 6i Опорные поверхности кантующих рычагов отрываются от фиксатора 8, рычаги вместе с изделием поворачиваются на угол 3°, что соответствует ходу путевого вьжлючателя 10, дакще- го команду на отключение двигателя, Одновременно с подходом опорной поверхности кантующих рычагов 7 к фиксатору 9 путевой вьпслючатель 10 отключает двигатель и дает ему команду на обратный ход поворотного вала 3 в исходную позицию. Под действием собственного веса кантующих рычагов 7 с изделием 23 кантукщая рама 5 начинает поворот самостоятельно и опускает изделие вииз. Все динамические нагрузки в момент отрыва и самостоятельного поворота воспринимает силовой цилиидр 17, одновременно осуществляя медленное опускание изделия вплоть до окоичания цикла поворота, В конечном положении изделие 23 освобождается от зажимов 22. : .
Из нижнего положения (фиг,5) привод 2 возвращает кантующие рычаги 7 в исходное положение (фиг.4). Вначале поворотный вал 3 воздействует во- дилом на фиксатор 9, поворачивая кантующую раму 5 и кантующие рычаги 7 до положения равновесия, далее под действием собственного веса их опорные поверхности отрываются от фиксатора 9, совершают поворот на 3 и опираются на фиксатор 8, воздействуя иа
0 путевой выключатель I1, двигатель
привода поворачивает вал 3 в исходное положение, а кантующая рама 5 с рычагами 7 опускается под действием собственного веса в исходное положение.
5 При этом Е начале поворота вала 3 из нижнего положения кривошип 13 остается на месте вплоть до поворота кантующих рычагов на угол 70°, а далее поводок 16 кантующей рамы 5 входит
0 во взаимодействие с упором 15, поршень 18 со штоком 19 начинает опускаться вниз, рабочая жидкость через обратный клапан 21 перетекает из нижней полости цилиндра 17 в верхнюю,
5 обеспечивая беспрепятственное и плавное возвращение кантующих рычагов 7 в исходное положение.
Формула изобретения
0
Кантователь, включающий смонтированный на основании поворотный от привода вал, кантующие рычаги и приспособление для стабилизации
5 ти поворота кантующих рычагов, выпЪл- ненное в виде кривошипа с упорами, взаимодействующего с ними поводка и шарнирно соединенного с кривошипом силового , полости кото0 рого соединены через дроссель и обратный клапан, отличающий- с я тем, что, с целью повьш1ения надежности и увеличения долговечности работы кантователя путем обеспечения
5 разгрузки кантователя от силового воздействия привода при опускании кантующих рычагов, ои снабжен свободно установленной на валу кантующей рамой с ограничительными фиксатора0 ми и путевыми выключателями управления приводом и жестко смонтированным на валу с возможностью взаимодействия с фиксаторами водилом, при этом кантующие рычаги установлены на кан5 тующей раме посредством расположенной между фиксаторами оси с возмож- , костью свободного качания между фиксаторами на угол 2-3 и взаимодействия с противоположными от воздейстсриг.2
J2
/J
Редактор В.Петраш
Составитель Б.Толчанов Техред Л.ОлийНык
Ц) и г. 5
Корректор А.Обручар
| Манипулятор | 1979 |
|
SU793738A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Кантователь | 1981 |
|
SU967922A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
