«
4 СЛ
;о
СЛ 1С
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для механизации и автоматизации производственных процессов, и может быть использовано, например, в станкостроении.
Целью изобретения является повышение надежности захвата.
На фиг. 1 изображен захват манипулятора в исходном положении; на фиг. 2 - то же, в рабочем положении с удерживаемой деталью.
Захват манипулятора содержит корпус 1, зажимные губки 2, смонтированные на штырях 3 корпуса, и привод разведения губок. Привод состоит из штока 4, неподвижно установленного в корпусе 1, и цилиндра 5, подвижного относительно штока. Между крышками 6 цилиндра 5 коаксиально ему расположен подвижный клин 7, подпружиненный пружиной 8 и имеющий возможность взаимодействия с губками 2. Каждая из полостей цилиндра А и Б ограничена внутренней поверхностью цилиндра 5, наружной поверхностью штока 4 и крышкой 6 и соединена с источником давления (не показан). При осуш,ествлении захвата между нижним торцом, клина 7 и нижней крышкой б цилиндра 5 образуется зазор 6 . В губках 2, в местах их соединения с корпусом 1, выполнены пазы 8, большие оси которых перпендикулярны продольной оси захвата, что обеспечивает перемешение губок в направлении, перпендикулярном перемешению клина 7. Кроме того, губки охвачены кольцевыми пружинами 9, расположенными в два яруса, один из которых выше, а другой ниже зоны контакта клина с губками.
Захват манипулятора работает следую- шим образом.
В исходном положении перед захватыванием объекта давление, поданное в полость А удерживает в верхнем положении цилиндр 5, на котором клин 7 поджат пружиной 8 к торцу крышки 6. Губки 2 сведены прудинами 9 и 10. Для взятия детали захват вводится в
ее отверстие, давление подается в полость Б, а полость А цилиндра 5 соединяется со сливом. Цилиндр 5 с подпружиненным клином 7 перемещается вниз, раздвигая губки 2 по
пазам 8 параллельно плоскости отверстия захватываемой детали до касания с ее по- верхность|о. Деталь оказывается захваченной разжатыми губками, причем удерживание детали происходит по плоскости. При дальнейшем движении цилиндра 5 пружина 11 поджимает клин 7, в конце хода образуется зазор S между клином 7 и крышкой 6. В случае внезапного падения давления в- полость Б цилиндра 5 при захваченном объекте зазор уменьшается, но усилие захвата
5 остается достаточным для удержания детали за счет поджатия клина 7 пружиной. При освобождении объекта давление подается в полость А, а полость Б цилиндра 5 соединяется со сливом. Цилиндр 5 и клин 7 перемещаются вверх, губки 2 сводятся и освобож0
дают деталь.
Формула изобретения
Захват манипулятора, содержащий за- 5 жимные губки, смонтированные в корпусе на штырях с возможностью поворота относительно них, а также привод их разведения, выполненный в виде цилиндра, корпус которого подвижен относительно штока и снабжен коаксиально расположенным относительно него клином, имеющим возможность взаимодействия с губками, отличающийся тем, что, с целью повышения надежности захвата, клин выполнен подпружиненным относительно цилиндра и установлен с возмож- 5 ностью возвратно-поступательного перемещения вдоль него, а в губках, в .местах их крепления к корпусу, выполнены пазы, большие оси которых перпендикулярны продольной оси захвата, и, кроме того, губки выполнены подпружиненными относительно одна другой, причем пружины расположены в два яруса, один из которых выше, а другой ниже зоны контакта клина с губками.
0
5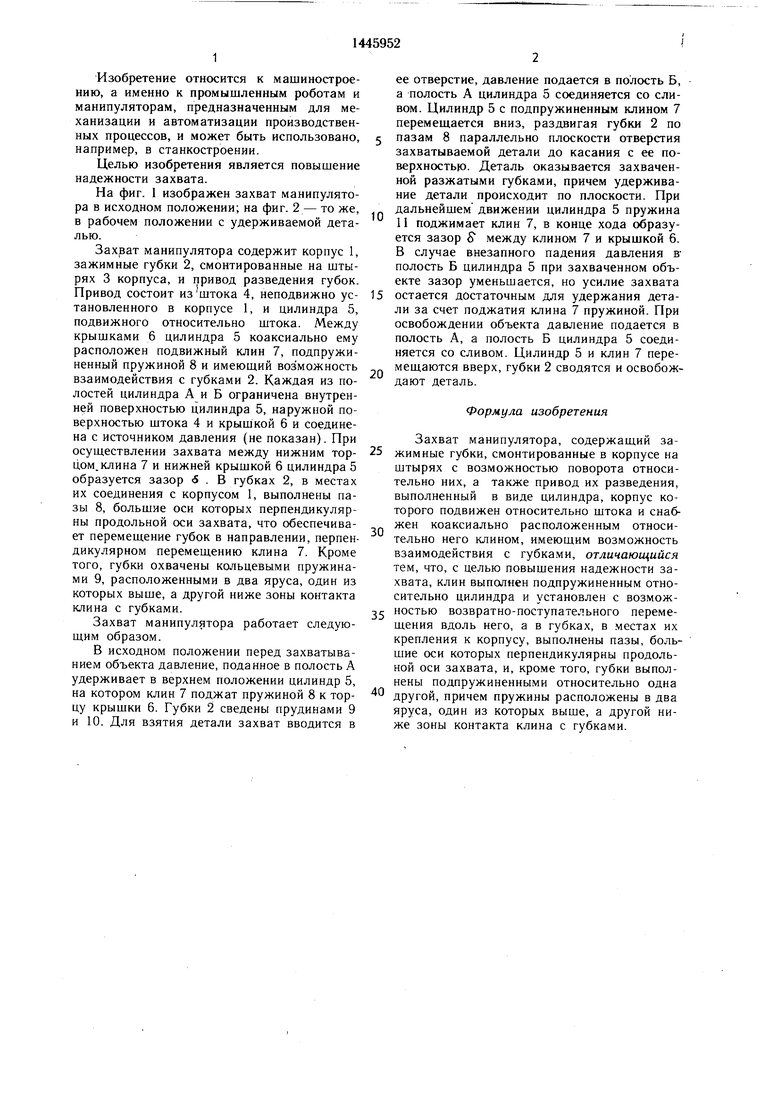
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1988 |
|
SU1516345A2 |
| Захват | 1977 |
|
SU667396A1 |
| Захват | 1977 |
|
SU663577A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Автомат для стыковой сварки давлением | 1988 |
|
SU1668074A1 |
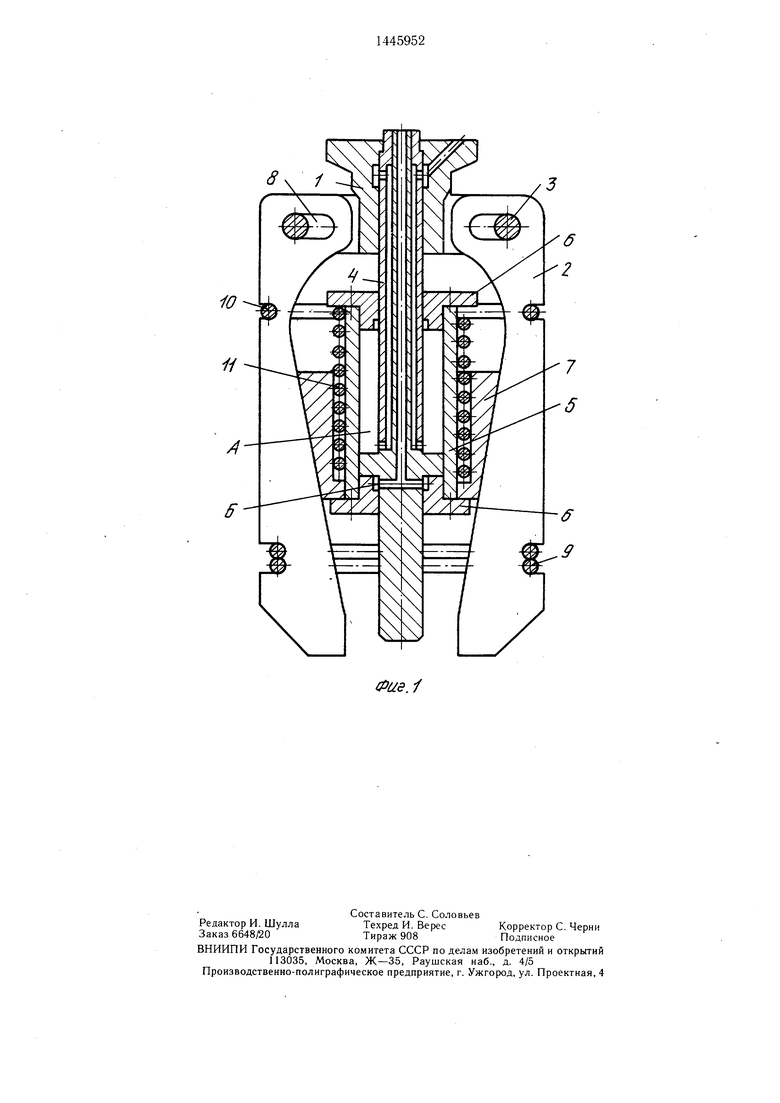
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для механизации и автоматизации производственных процессов. Цель изобретения - повышение надежности захвата. С этой целью привод разведения губок 2 захвата снабжен клином 7, подпружиненным относительно корпуса цилиндра 5, подвижного относительно штока 4. Клин 7 установлен с возмож- ностью возвратно-поступательного перемещения относительно корпуса цилиндра 5 и взаимодействия с губками 2, в местах крепления которых к корпусу 1 выполнены пазы 8, обеспечивающие возможность перемещения губок в направлении, перпендикулярном продольной оси захвата. Губки подпружинены одна относительно другой. Для захватывания детали губки 2 вводятся внутрь отверстия, выполненного в детали. Подается давление в полость Б цилиндра 5, полость А которого при этом соединяется со с.пивом. В результате корпус цилиндра 5 с клином 7 перемешаются вниз, раздвигая губки 2 до касания с внутренней поверхностью детали. В конце хода цилиндра 5 образуется зазор между ними торцом клина 7 и нижней крыщ- кой цилиндра 5, наличие которого обеспечивает сохранение созданного усилия захвата в случае внезапного падения давления в полости Б цилиндра. 2 ил. ш (Л
| Схват промышленного робота | 1980 |
|
SU918087A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
