00 СО СО
5 Фиг.1
Изобретение относится к промышленным роботам и манипуляторам и предназначено для захвата, транспортирования и манипулирования деталями, преимущественно типа тел вращения с коническими поверхностями.
Цель изобретения - расширение технологических возможностей схвата про- ышленного робота путем обеспечения надежного удержания при захвате как цилиндрических, так и конических деталей.
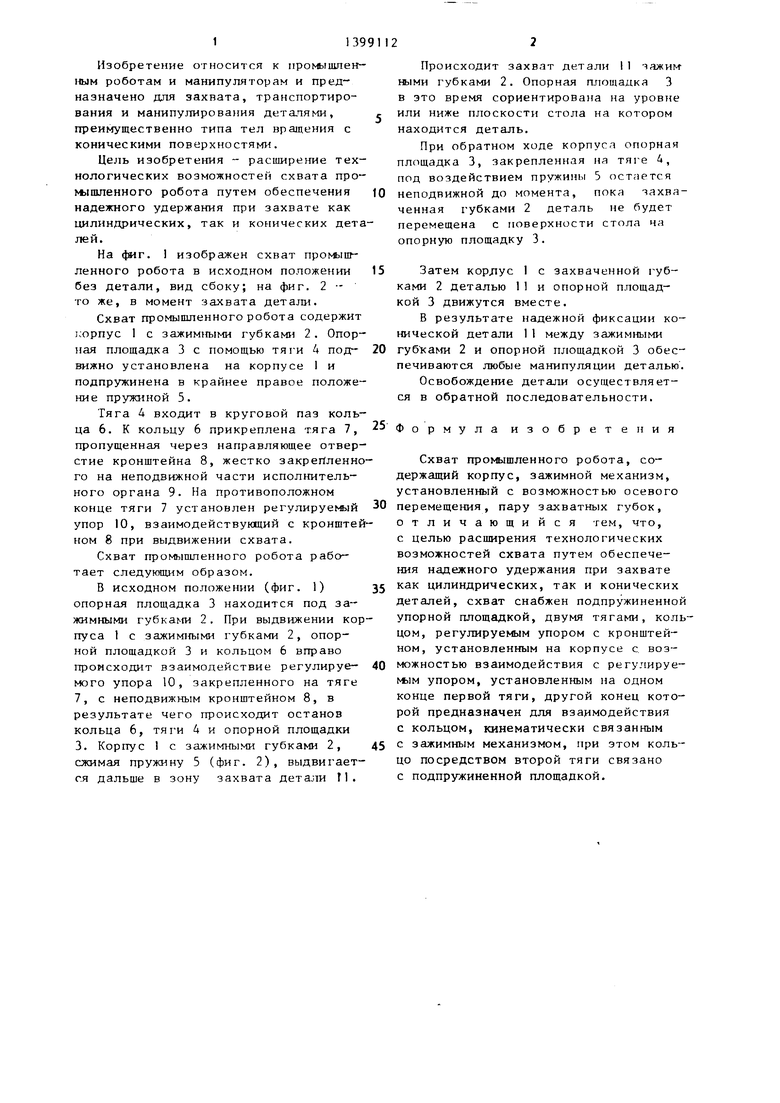
На (}мг. 1 изображен схват npoNbim- ленного робота в исходном положении без детали, вид сбоку; на фиг. 2 - то же, в момент захвата детали.
Схват промышленного робота содержит корпус 1 с зажимными губками 2. Опорная площадка 3 с помощью тяги А под- вижно установлена на корпусе 1 и подпружинена в крайнее правое положение пружиной 5.
Тяга 4 входит в круговой паз кольца 6. К кольцу 6 прикреплена тяга 7, пропущенная через направляющее отверстие кронштейна 8, жестко закрепленного на неподвижной части исполнительного органа 9. На противоположном конце тяги 7 установлен регупируеъ&т упор 10, взаимодействукщий с кронщтей ном 8 при выдвижении схвата.
Схват промышленного робота работает следующим образом.
В исходном положении (фиг. 1)
опорная площадка 3 находится под зажимными губками 2. При выдвижении корпуса 1 с зажимными губками 2, опорной площадкой 3 и кольцом 6 вправо происходит взаимодействие регулируе- мого упора 10, закрепленного на тяге 7, с неподвижным кронштейном 8, в результате чего происходит останов кольца 6, тяги А и опорной площадки 3. Корпус 1 с зажимными губками 2, сжимая пружину 5 (фиг. 2), выдвигается дальше в зону захвата детали 1.
Происходит захват детали 1 1 тажим ными губками 2. Опорная площадка 3 в зто время сориентирова)1а на уровне или ниже плоскости стола на котором находится деталь.
При обратном ходе корпуса опорная площадка 3, закрепленная на тяге 4, под воздействием пружины 5 остается неподвижной до момента, пока захваченная губками 2 деталь не будет перемещена с поверхности стола ча опорную площадку 3.
Затем корлус 1 с захваченной губками 2 деталью 11 и опорной площадкой 3 движутся вместе.
В результате надежной фиксации конической детали 11 между зажимными губ ками 2 и опорной площадкой 3 обеспечиваются любые манипуляции деталью
Освобождение детали осуществляется в обратной последовательности.
Формула изобретения
Схват промышленного робота, содержащий корпус, зажимной механизм, установленный с возможностью осевого перемещения, пару захватных губок, отличающи йся тем, что, с целью расширения технологических возможностей схвата путем обеспечения надежного удержания при захвате как цилиндрических, так и конических деталей, схват снабжен подпружиненно упорной площадкой, двумя тягами, колцом, регулируемым упором с кронштейном, установленным на корпусе с возможностью взаимодействия с регулируе- упором, установленным па одном конце первой тяги, другой конец которой предназначен для взаимодействия с кольцом, кинематически связанным с зажимным механизмом, при этом кольцо посредством второй тяги связано с подпружиненной площадкой.
5
(
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1985 |
|
SU1284831A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1329948A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Грузозахватное устройство | 1977 |
|
SU742338A1 |

Изобретение относится к про- мьшшенным роботам и предназначено для захвата деталей, удержания и манипулирования ими, преимущественно типа.тел вращения с коническими поверхностями. Целью изобретения является расширение технологических возможностей путем обеспечения надежного удержания как цилиндрических, так и конических деталей. При перемещении нажимного механизма схвата вместе с опорной площадкой 3 и кольцом 6 вправо происходит взаимодействие упора 10 с кронштейном 8 и в результате останов кольца 6, тяги 4 и опорной площадки 3. Корпус 1, сжимая пружину 5, выдвигается дальше в рабочую зону, где и осуществляется захват детали 11. При обратном ходе корпуса опорная площадка 3 под воздействием пружины 5 остается неподвижной до момента, пока захваченная губками 2 деталь 11 не будет перемещена с поверхности стола на опорную площадку 3. Далее корпус с удерживаемой губками 2 деталью движутся вместе, чем обеспечивается надежная фиксация в захвате деталей сложной формы. 2 ил. S (Л
| Захват | 1976 |
|
SU592591A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
