11
Изобретение относится к машине- строению, в частности к грузозахватным устройствам, и может быть исполь зовано в различных манипуляторах, например в кузнечно-штамповочном производстве при подаче заготовок в зону обработки.
Цель изобретения - повышение надежности и расширение технологичес- ких возможностей схвата манипулятора за счет удержания заготовки, совершающей технологические перемешения в любой плоскости во время обработки.
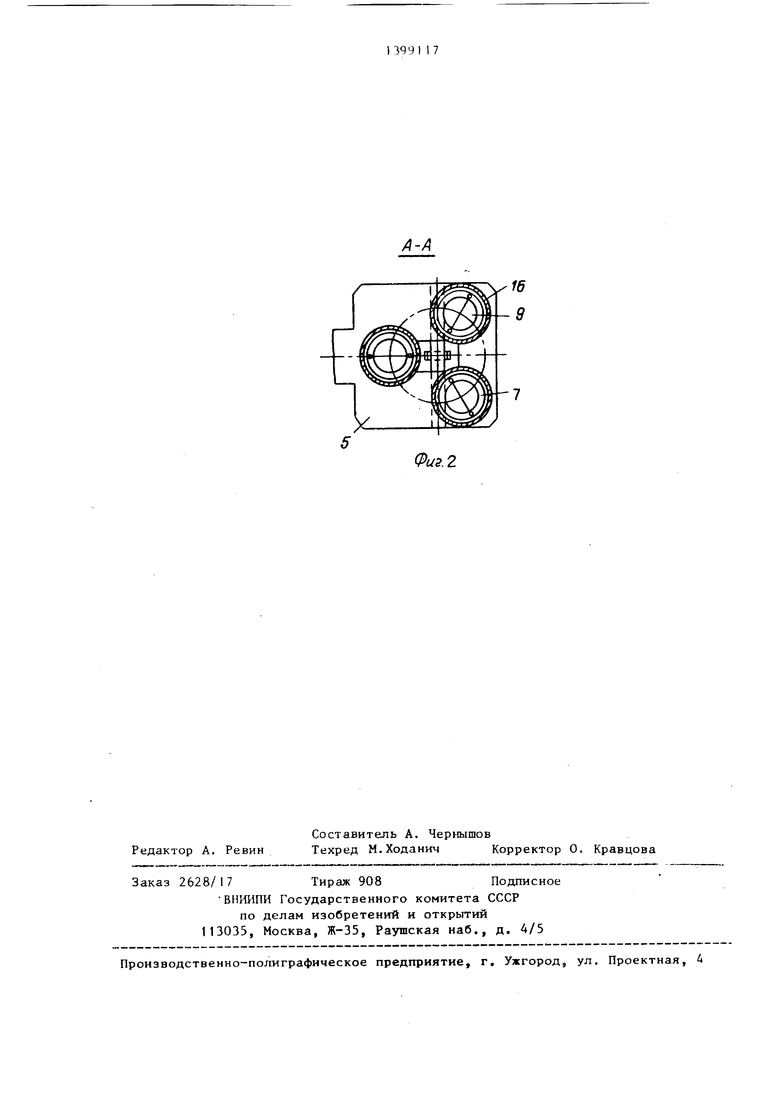
На фиг. 1 изображен узел компенса ции перемещений, разрез; на фиг. 2 - сечение А-А на фиг. 1.
Схват манипулятора состоит из захватных рычагов 1 и 2, связанных с механизмом привода, размещенного в корпусе 3.
Схват манипулятора снабжен узлом компенсации перемещений, выполненным в виде кинематически связанных между собой кронштейнов 4 и 5,. крон- : штейн 4 закреплен на руке 6 манипулятора, а на кронштейне 5 установлен корпус 3 схвата.
Между кронштейнами А и 5 размещены три опоры, каждая из которых сое- тоит из двух конусов 7 и 8 и сферы 9, размещенной между ними.
Устройство регулировки усилия узла компенсации перемещений состоит из корпуса пневмоэлемента 10, шток 11 которого через серьгу 12, ось 13 и подвижное звено 14 связан с осью 15, закрепленной на кронштейне 5. Для предупреждения выпадания сфер 9 из конусов 7 и 8 сдужат втулки 16. Конус 7 фиксируется гайкой 17 и штифтами 18.
Схват манипулятора работает следующим образом.
При захвате заготовки из накопи- тельного .устройства и подаче ее в зону обработки необходимая жесткость схвата и точность позиционирования обеспечиваются подачей высокого давления Р в щтоковую полость пневмо- элемента 10. При этом шток 11 через серьгу 12, оси 13 и 15 и подвижное
72
звено 1А создает усилие сжатия конусов 7 и 8, которое препятствует качению сферы 9 в конусах и обеспечивает неподвижность кронштейна 4 относительно кронштейна 5.
При обработке заготовки имеют место ее принудительные технологические перемещения за счет воздействия на нее верхней части штампа или молота. Схват, жестко удерживаюш 1Й заготовку, должен совершать технологические перемещения вместе с нею.Это обеспечивается подачей низкого давления Р в штоковую полость пневмоэлемента 10. При этом ослабевает усилие сжатия конусов 7 и 8 и кронштейн 5 получает возможность необходимого перемещения относительно кронштейна 4.
Узел -компенсации перемещений предлагаемого схвата манипулятора (в отличие от известных) обладает широкими функциональными возможностями, обеспечивая надежное удержание схва- том заготовки в процессе ее кузнечно- прессовой обработки.
Формула изобретения
Схват манипулятора, содержащий корпус с приводом и захватные рычаги, связанные с приводом узлом компенсации перемещений, отличающийся тем, что, с целью повышения надежности и расширения технологических возможностей, узел компенсации перемещения выполнен в виде двух кронштейнов, кинематически связанных между собой с помощью трех сферических опор, при этом один из кронштейнов закреплен на руке манипулятора, а на другом кронштейне установлены захватные рычаги с приводом, кроме того, узел компенсации перемещений снабжен дополнительно введенным устройством регулировки его усилия, состоящим из корпуса пневмоэлемента, жестко закрепленного на одном из -кронштейнов, и расположенной в упомянутом корпусе мембраной со щтоком, шарнирно закрепленным на другом кронштейне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Схват | 1983 |
|
SU1119842A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Механическая рука манипулятора | 1985 |
|
SU1301695A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Робот | 1991 |
|
SU1781026A1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА, ПЕРЕНОСА И СБРОСА ДЕТАЛЕЙ | 1993 |
|
RU2041055C1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
Изобретение относится к мапшно- строению, в частности к грузозахватным устройствам, и может быть использовано в различных манипуляторах, например, в кузнечно-штамповочном производстве при подаче заготовок в зону обработки. Целью изобретения является расширение технологических возможностей за счет удержания заготовки, совершающей технологические 10 перемещения в любой плоскости во время обработки, и повышение надежности. Схват манипулятора состоит из захватных рычагов 1 и 2, связанных с механизмом привода, размещенного в корпусе 3 и снабжен узлом компенсации перемещений, выполненным в виде кинематически связанных между собой кронштейнов 4 и 5, один из которых 4 закреплен на руке 6 манипулятора, а на кронштейне 5 установлен корпус 3 схвата. Между кронштейнами 4 и 5 размещены три сферические опоры. Устройство регулировки усилия узла компенсации состоящий из корпуса пневмоэлемента 10,установленного на кронштейне 4,и штока 11,шарнирно связанного с кронштейном 5.Подачей в што- ковую полость пневмоэлемента 10 различного давления регулируется усилие узла компенсации. 2 нл. с (Л х со (Puz.1
Фиг. 2
| Захват промышленного робота | 1979 |
|
SU844264A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
