Известны способы и методика синтеза оптимальных передаточных функций систем автоматического регулирования (САР), находящихся под влиянием случайных воздейстий. Известны также самонастраивающиеся САР, Б которых получение некоторого оптимального значения достигается путем изменения структуры системы.
Предлагаемый способ коррекции систем автоматического регулирования (САР) отличается от известных тем. что изменение структуры САР производится в период переходного процесса в функции знаков сигнала до и после элементов САР, подлежащих коррекции, что позволяет получить заданные динамические характеристики по отношению к задающему и возмущающему воздействию. Иными словами, описываемый способ состоит в коррекции исходной САР (с введенным корректирующим фильтром) посредством изменения ее структуры в зависимости от знаков отклонения регулируемого параметра до и после корректирующего звена в замкнутой цепи регулирования.
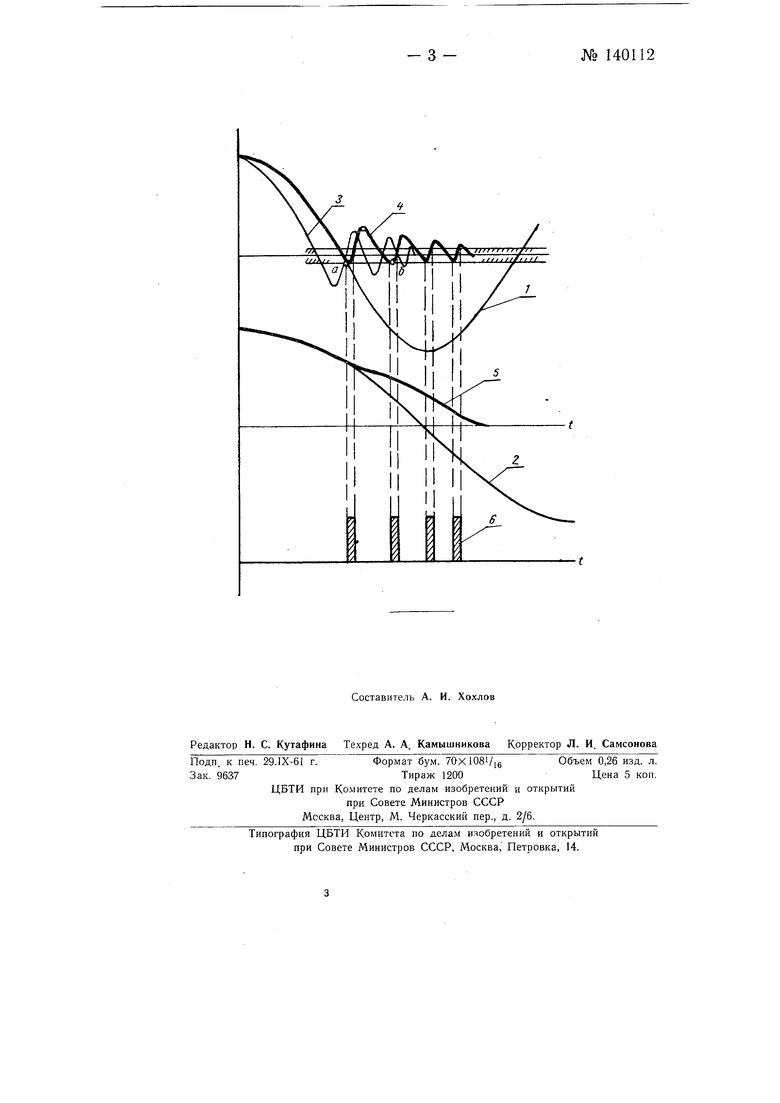
Пусть в САР после введения фильтра переходной процесс на входе характеризуется медленно затухающими колебаниями (кривая /, см. чертеж). Изменение регулируемой переменной на выходе фильтра, включенного последовательно, например, с измерительным элементом, имеет при этом характер кривой 2. Та же САР без фильтра, не имеющая среза высокочастотных возмущений, характеризуется переходным процессом (кривая 3). Задача приближения переходного процесса (кривая Г) к переходному процессу (кривая 5) с обеспечением одновременного среза возмущающего воздействия по описываемому способу решается следующим образом. Если сравнивать между собой знаки регулируемой переменной до и после фильтра, являющегося причиной ухудшения динамических свойств САР, и в моменты, когда знак ординаты кривой / изменится относительно знака ординаты кривой 2, производить изменение
№140112-2структуры исходнй САР, например, исключая в эти периоды фильтр, то характер переходных процессов в системе с измененной структурой может быть представлен соответственно кривой 4 (до фильтра) и кривой 5 (после фильтра). В момент изменения знака ординаты кривой У (точка а) относительно ординаты кривой 2 включается дискретный элемент (см. кривую 6), который переключает исходную САР, исключив фильтр. В момент обратного изменения знака (точка б) дискретный знакочувствительный элемент, управляющий изменением структуры САР, вновь отключается, восстанавливая исходную структуру при меньшей величине ошибки. Как видно из чертежа, переходной процесс в системе с коррекцией ПО описываемому способу протекает за более короткое время, являясь практически мало колебательным.
Таким образом, в системе с коррекцией по предлагаемому способу любое возникшее первоначальное отклонение, вызванное воздействием возмуш.ений, проходит через элементы системы, обеспечивающие соответствуюший срез высоких частот, а реакция системы по цепи обратной связи воспринимается, минуя фильтрующие устройства.
В качестве фильтра рассматривается в общем случае совокупность тех или иных элементов САР, обладающих определенными динамическими характеристиками, подлежащими-коррекции. В зависимости от места отбора по цепочке САР сигнала, ноступающего на элемент, изменяющий структуру САР, вводится та или иная степень коррекции.
При изменении знака сигнала до и после элементов, характеристики которых корректируются, дискретный (или иной) элемент не обязательно исключает их в период переходного процесса, а для получения заданных динамических характеристик САР по отнощению к заданному и возмущающему воздействию указанный элемент может изменить структуру САР так, что, исключив одни ее элементы, вводит другие, или те же, но подключенные в ином порядке.
Таким образом, описываемый способ в общем случае предполагает изменение структуры САР для получения заданных динамических харектиристик по отнощению к задающему и возмущающему воздействиям в функции знаков сигнала до и после элементов, характеристики которых подлежат коррекции.
Предмет изобретения
Способ коррекции систем автоматического регулирования (САР), отличающийся тем, что, с целью получения заданных динамических характеристик по отношению к задающему и возмушающему воздействию, производится изменение структуры САР в период переходного процесса в функции знаков сигнала до и после элементов САР, подлежащих коррекции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| СПОСОБ КОРРЕКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1973 |
|
SU409191A1 |
| Способ коррекции нелинейной системы автоматического регулирования | 1972 |
|
SU451047A1 |
| Способ расширения диапазона регулирования АСР без потери устойчивости | 2016 |
|
RU2619746C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ И МОМЕНТА ЭЛЕКТРОПРИВОДА | 1996 |
|
RU2096905C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2001 |
|
RU2211470C2 |
| Регулятор для объектов с запаздыванием | 1986 |
|
SU1361503A1 |
| Способ управления технологическим процессом и устройство для его осуществления | 1978 |
|
SU1110843A1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЕМКОСТНЫМИ СОСТАВЛЯЮЩИМИ ОБЪЕКТА | 2009 |
|
RU2442206C2 |