(S
Изобретение относится к машиност- роению для пищевой промышленности, в частности для разливочно-укупорочно го производства.
Цель изобретения - упрощение консрукции и повышение производительности путем замены дискретного перемещения транспортера на его непрерывное движение при периодической остановке потока ящиков.
На фиг. 1 изображено устройство, вид сбоку; на фиг. 2 - то же, вид сверху (захватная головка не показана) .
Устройство подачи ящиков к захватной головке мащин для укладки и извлечения стеклянных бутылок содержит горизонтальный транспортер 1, . состоящий из установленных с зазором паргшлельных цепей, и механизм регулирования подачи ящиков 2 к захватной головке 3 с пневмоцилиидром 4 и пневмоклапанами 5 и 6 для управления последним. Механизм регулирования подачи ящиков 2 представляет собой смонтированную на звездочках 7 и 8 под горизонтальный транспортером 1 и наклонно к нему подвижную замкнутую цепь 9 с равномерно закрепленными, на ней выступакшщми наружу пальцами 10 для взаимодействия с ящиками 2. Звездочки 7 и 8 укреплены на горизонтальных осях 11 и имеют планки 12,13 и 14 для вз аимодействия с пневмоклапанами 5 и 6 и штоком 15 пневмоцилиндра 4.
Пальцы 10 смонтированы с возмож-. ностью перемещения в зазоре между цепями горизонтального транспортера.
Над горизонтальным транспортером 1 установлен с возможностью регулирования по Н)1соте пневмоклапан 16 для взаимодействия с захватной го лов.- кой 3.
Звездочки 7 и 8 цепи 9 механизма регулирования подачи ящиков 2 смонтированы на наклонной балке 17, имеющей возможность изменения угла наклона посредством установленного на ее конце винта 18.
Устройство подачи ящиков работает следующим образом.
Запускается транспортер 1, на котором располагается множество ящиков 2 с пустыми бутылками 19 (или без них). В каждом ящике имеется двадцать ячеек и может быть разйе- щено двадцать бутылок (четыре ряда
0
5
0
0
5
0
5
0
5
по пять бутылок). при перемещении транспортера 1 поочередно перемещаются проникшие в решетчатые ящики 2 пальцы 10, в результате чего цепь 9. начинает двигаться, причем пальцы 10 проникают через каждые два ящика. Вращаясь, планка 12 взаимодействует с пневмоклапаном 5, который включает в работу пневмоцилиндр 4, вследстие чего шток 15 выдвигается. Когда планка 14 надвигается на щток 15 движение цепи 9 прекращается, одновременно останавливается и движение ящиков 2, так как остановивщий- ся палец 10 этому движению препятствует. Два ящика точно останавливаются под захватной головкой 3.
Поднимаясь, захватная головка 3 включает пневмоклапан 16, который управляет движением штока 15 обратно в цилиндр 4. Цепь 9, освободившись, снова начинает движение под дейстг вием .наступающих ящиков 2. Вращаясь, планка 12 включает пневмокла- пан 6, и захватная головка 3 вновь выполняет операцию по укладке или извлечению бутылок 19. Цикл повторяется.
Формула изобретения
1. Устройство подачи ящиков к захватной головке машин для укладки и извлечения стеклянных бутылок, содержащее горизонтальный транспортер, состоящий из установленных с зазором параллельных цепей, и механизм регулирования подачи ящиков к захватной головке с пневмоцилиндром и пневмоклапанами для управления последним, отличающее ся .тем, что, с целью упрощения конструкции и повы- щения производительности, меха1шзм регулирования подачи ящиков представляет собой смонтированную на звездочках под горизонтальным транспортером и наклонно к нему подвижную замкну-- тую цепь с равномерно закрепленными на ней выступающими наружу пальцами для взаимодействия с ящиками, при этом звездочки укреплены на горизонтальных осях и имеют планки для взаимодействия с пневмоклапанами и щтоком пневмоцилиндра, а пальцы смонтированы с возможностью перемещения в зазоре между цепями горизонтального транспортера.
. Устройство по п. 1, отличающееся тем, что над гори-зонтальным транспортером установлен с возможностью регулирования по высоте пневмоклапан для взаимодействия с захватной головкой,
3. Устройство по п. 1, отличающееся тем, что, с целью
повышения надежности работы, звездочки цепи механизма регулирования подачи ящиков смонтированы на наклонной балке, имеющей возможность изменения угла наклона посредством установленного на ее конце винта.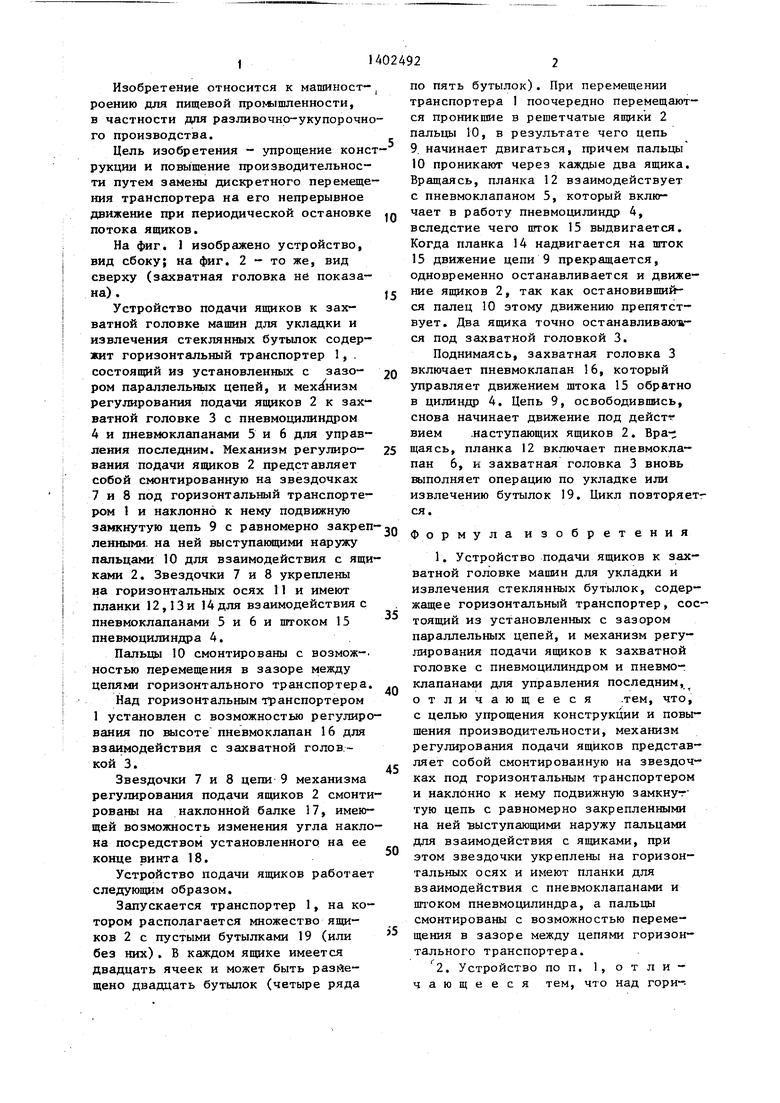
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕСЕСОЮвНАЯm^iim-iim-^m | 1973 |
|
SU379467A1 |
| УСТРОЙСТВО для УКЛАДКИ БУТЫЛОК В ЯЩИКИ | 1969 |
|
SU256603A1 |
| Устройство для укладки и извлечения изделий из тары | 1980 |
|
SU933548A1 |
| Устройство для группирований флаконов и укладки их в ящики | 1981 |
|
SU971712A1 |
| Агрегат для розлива и укупорки бутылок с газированными жидкостями | 1965 |
|
SU200447A1 |
| Устройство для укладки бутылок в контейнеры | 1983 |
|
SU1088998A1 |
| Устройство для укладки бутылок в ящики | 1982 |
|
SU1098869A1 |
| Устройство для укладки предметов в контейнеры | 1980 |
|
SU929496A1 |
| МАШИНА ДЛЯ ИЗВЛЕЧЕНИЯ И УКЛАДКИ БУТЫЛОК В ТАРУ | 1991 |
|
RU2010754C1 |
| Устройство для отделения ящиков отОбщЕгО пОТОКА | 1979 |
|
SU827344A1 |
Изобретение относится к области машиностроения для пищевой промышленности, в частности для разливочно- укупорочного производства. Целью изобретения является упрощение конструкции и повышение производительности путем замены дискретного перемещения транспортера (Т) 1 на его непрерывное движение при периодической остановке потока ящиков 2 под захватной головкой (-ЗГ) 3. Устройство пода-Ч чи ящиков 2 к захватной головке 3 машин для укладки и извлечения стеклянных бутылок 19 содержит смонтированную на звездочках 7 и 8 под горизонтальным транспортером 1 и наклонно к нему подвижную цепь 9,на которой равномерно закреплены выступающие наружу пальцы 10 для поочередного захвата ящиков 2 с целью их торможения на непрерывно движущемся транспортере 1 и фиксации под ЗГ 3. 2 з.п.; 4г-ды, 2 ил. i (Л С
гтт I I I I I I 15 I 11 И и I I г ггт
i
/
11 И и I I
i
Г I I V I I I
т
75 /I
k
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОСМИЧЕСКИЙ АППАРАТ | 1998 |
|
RU2131383C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
