У7/77/Л
к юв I tjuecoseee 11 ieioeMiseK 11 jfieiKVM 11 гввоовкn u« ciiii9e rii«i
А.
J2z2222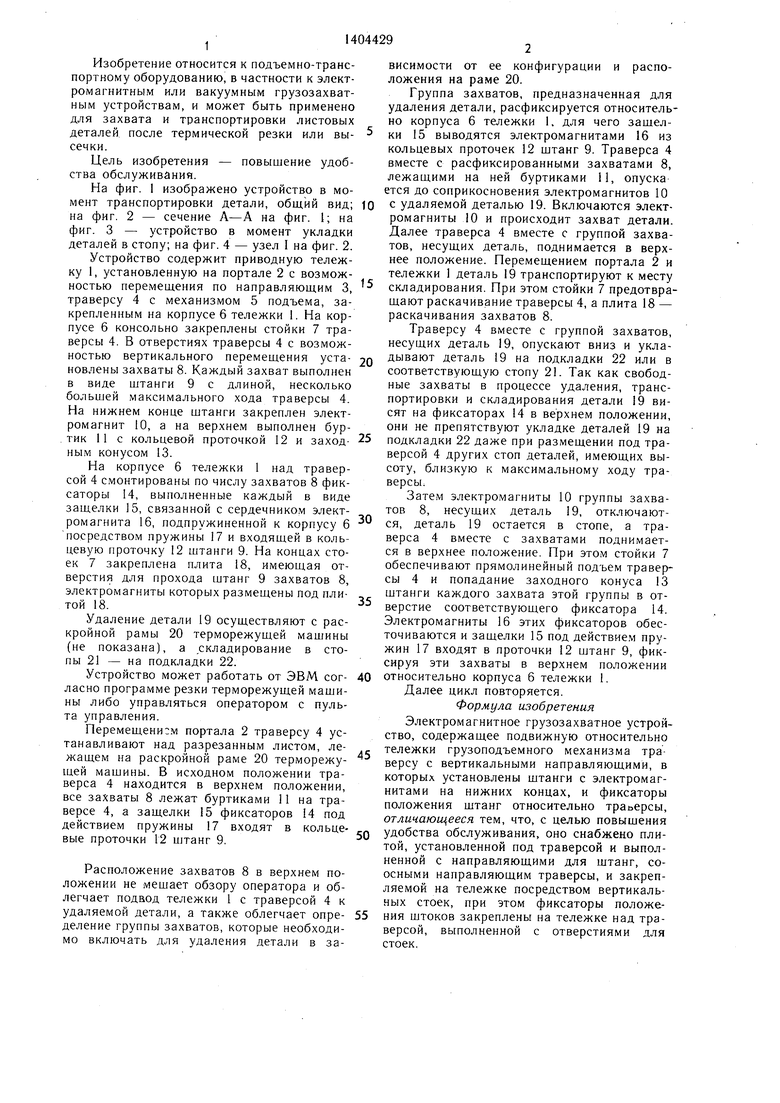
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для контактной стыковой сварки | 1977 |
|
SU662306A2 |
| Устройство для изготовления отводов | 1989 |
|
SU1682006A1 |
| Подъемно-транспортное устройство | 1986 |
|
SU1326544A1 |
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |
| Устройство для перемещения металлических деталей | 1981 |
|
SU1003977A1 |
| Установка с гравитационным проходным стеллажом | 1982 |
|
SU1187712A3 |
| Магазин-накопитель | 1986 |
|
SU1404263A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее к обрабатывающей машине | 1987 |
|
SU1397128A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Устройство для разгрузки щитовых деталей | 1982 |
|
SU1263599A1 |
Изобретение относится к подъемно- транспортному машиностроению. Целью изобретения является повышение удобства обслуживания. Электромагнитное . рузозахват- ное устройство содержит несущую траверсу 4 с механиз.мом подъема. На корпусе 6 тележки консольно смонтированы стойки 7, на концах которых закреплена плита 18 с отверстиями, через которые проходят штанги захватов 8. Фиксаторы захватов смонтированы на корпусе тс.чежки 1. а электромагниты 10 sa.N ojri OB раз ..ещены под плитой 18. 4 и.:|.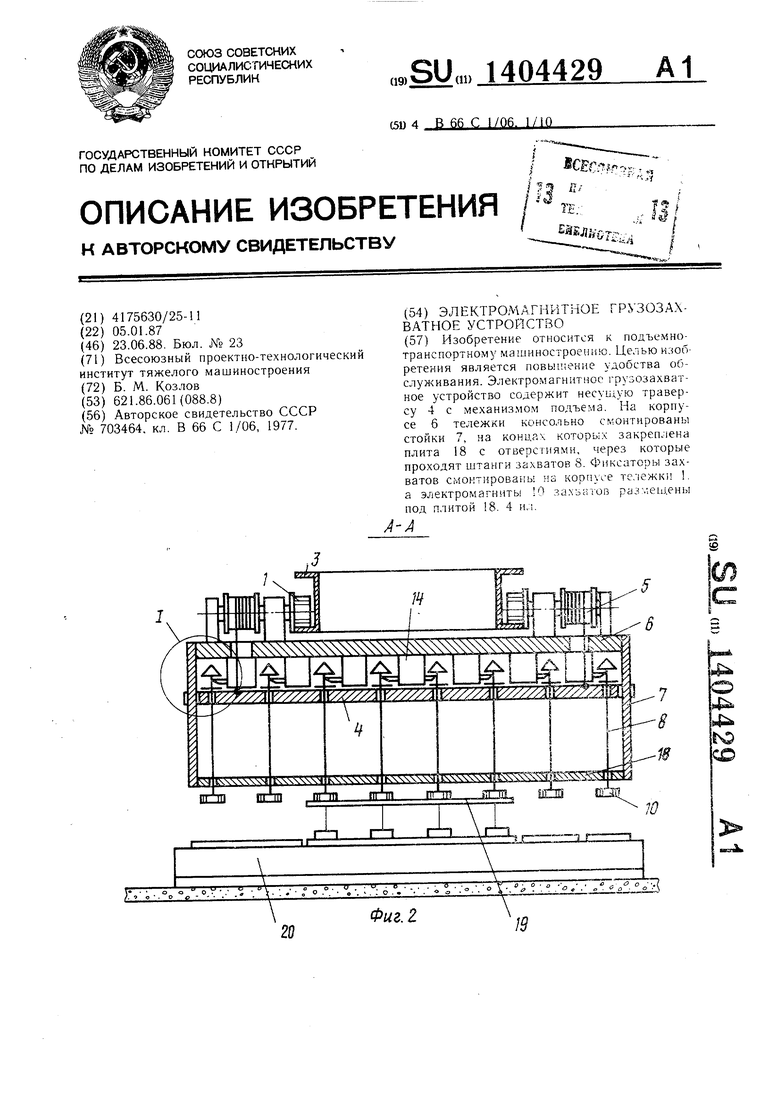
(II HIIII HIIII 111til IIIniTflW
;%-;-.°o . . .V:. - ° : о ..-..-о ° ...о 1.° °:° fo. .
20
eon
Фиг. 2
J3
Изобретение относится к подъемно-транспортному оборудованию, в частности к электромагнитным или вакуумным грузозахватным устройствам, и может быть применено для захвата и транспортировки листовых деталей после термической резки или высечки.
Цель изобретения - повышение удобства обслуживания.
На фиг. 1 изображено устройство в мовисимости от ее конфигурации и расположения на раме 20.
Группа захватов, предназначенная для удаления детали, расфиксируется относительно корпуса 6 тележки 1, для чего зашел- ки 15 выводятся электромагнитами 16 из кольцевых проточек 12 штанг 9. Траверса 4 вместе с расфиксированными захватами 8, лежащими на ней буртиками 11, опуска ется до соприкосновения электромагнитов 10
мент транспортировки детали, общий вид; Ю с удаляемой деталью 19. Включаются элект- на фиг. 2 - сечение Л-А на фиг. 1; наромагниты 10 и происходит захват детали.
фиг. 3 - устройство в момент укладкиДалее траверса 4 вместе с группой захвадеталей в стопу; на фиг. 4 - узел I на фиг. 2.тов, несущих деталь, поднимается в верхУстройство содержит приводную тележ-нее положение. Перемещением портала 2 и
ку 1, установленную на портале 2 с возмож-тележки 1 деталь 19 транспортируют к месту
ностью перемещения по направляющим 3, складирования. При этом стойки 7 предотвра- траверсу 4 с механизмом 5 подъема, за-щают раскачивание траверсы 4, а плита 18 -
крепленным на корпусе 6 тележки I. На кор-раскачивания захватов 8.
пусе б консольно закреплены стойки 7 тра-Траверсу 4 вместе с группой захватов,
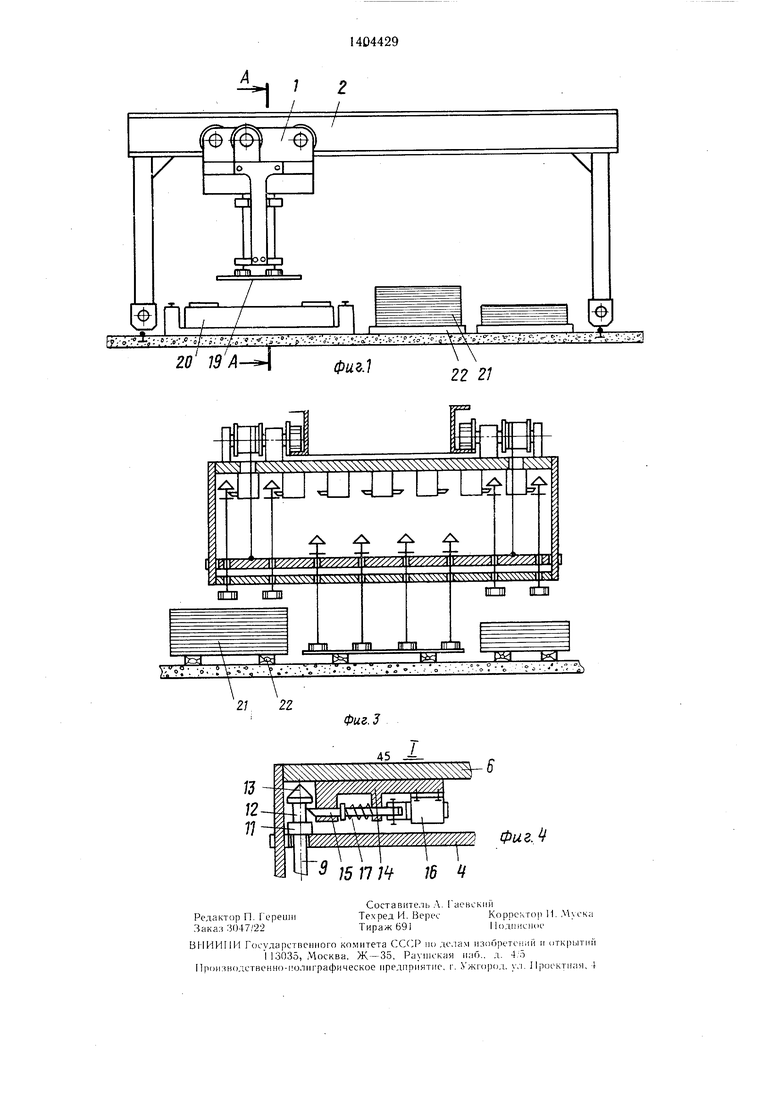
версы 4. В отверстиях траверсы 4 с возмож-несущих деталь 19, опускают вниз и укланостью вертикального перемещения уста- 20 Девают деталь 19 на подкладки 22 или в новлены захваты 8. Каждый захват выполненсоответствующую стопу 21. Так как свободв виде щтанги 9 с длиной, нескольконые захваты в процессе удаления, трансбольшей максимального хода траверсы 4. На нижнем конце щтанги закреплен электромагнит 10, а на верхнем выполнен буртик 11 с кольцевой проточкой 12 и заход- 25 ным конусом 13.
На корпусе 6 тележки 1 над траверсой 4 смонтированы по числу захватов 8 фиксаторы 14, выполненные каждый в виде защелки 15, связанной с сердечником электпортировки и складирования детали 19 висят на фиксаторах 14 в верхнем положении, они не препятствуют укладке деталей 19 на подкладки 22 даже при размещении под траверсой 4 других стоп деталей, имеющих высоту, близкую к максимальному ходу траверсы.
Затем электромагниты 10 группы захватов 8, несущих деталь 19, отключаютромагнита 16, подпружиненной к корпусу б ся, деталь 19 остается в стопе, а трапосредством пружины 17 и входящей в кольцевую проточку 12 щтанги 9. На концах стоек 7 закреплена плита 18, имеющая отверстия для прохода щтанг 9 захватов 8, электромагниты которых размещены под плитой 18.
Удаление детали 19 осуществляют с раскройной рамы 20 терморежущей мащины (не показана), а .складирование в стопы 21 - на подкладки 22.
35
верса 4 вместе с захватами поднимается в верхнее положение. При этом стойки 7 обеспечивают прямолинейный подъем траверсы 4 и попадание заходного конуса 13 щтанги каждого захвата этой группы в отверстие соответствующего фиксатора 14. Электромагниты 16 этих фиксаторов обесточиваются и защелки 15 под действием пружин 17 входят в проточки 12 щтанг 9, фиксируя эти захваты в верхнем положении
Устройство может работать от ЭВМ сог-40 относительно корпуса 6 тележки 1. ласно программе резки терморежущей мащи-Далее цикл повторяется,
ны либо управляться оператором с пуль-Формула изобретения
та управления.Электромагнитное грузозахватное устройПеремещени:м портала 2 траверсу 4 ус-ство, содержащее подвижную относительно
танавливают над разрезанным листом, ле-тележки грузоподъемного механизма тражащем на раскройной раме 20 терморежу- версу с вертикальными направляющими, в
щей мащины. В исходном положении траверса 4 находится в верхнем положении, все захваты 8 лежат буртиками 11 на траверсе 4, а защелки 15 фиксаторов 14 под действием пружины 17 входят в кольцевые проточки 12 щтанг 9.
Расположение захватов 8 в верхнем положении не мещает обзору оператора и облегчает подвод тележки 1 с траверсой 4 к
которых установлены щтанги с электромагнитами на нижних концах, и фиксаторы положения щтанг относительно траьерсы, отличающееся тем, что, с целью повышения 50 удобства обслуживания, оно снабжено плитой, установленной под траверсой и выполненной с направляющими для штанг, со- осными направляющим траверсы, и закрепляемой на тележке посредством вертикальных стоек, при этом фиксаторы положеудаляемой детали, а также облегчает опре- 55 ния щтоков закреплены на тележке над траделение группы захватов, которые необходи-версой,
МО включать для удаления детали в за-стоек.
выполненной с отверстиями для
ные захваты в процессе удаления, транспортировки и складирования детали 19 висят на фиксаторах 14 в верхнем положении, они не препятствуют укладке деталей 19 на подкладки 22 даже при размещении под траверсой 4 других стоп деталей, имеющих высоту, близкую к максимальному ходу траверсы.
Затем электромагниты 10 группы захватов 8, несущих деталь 19, отключаются, деталь 19 остается в стопе, а трася, деталь 19 остается в стопе, а тра
верса 4 вместе с захватами поднимается в верхнее положение. При этом стойки 7 обеспечивают прямолинейный подъем траверсы 4 и попадание заходного конуса 13 щтанги каждого захвата этой группы в отверстие соответствующего фиксатора 14. Электромагниты 16 этих фиксаторов обесточиваются и защелки 15 под действием пружин 17 входят в проточки 12 щтанг 9, фиксируя эти захваты в верхнем положении
которых установлены щтанги с электромагнитами на нижних концах, и фиксаторы положения щтанг относительно траьерсы, отличающееся тем, что, с целью повышения удобства обслуживания, оно снабжено плитой, установленной под траверсой и выполненной с направляющими для штанг, со- осными направляющим траверсы, и закрепляемой на тележке посредством вертикальных стоек, при этом фиксаторы положения щтоков закреплены на тележке над травыполненной с отверстиями для
N WvNSN
ТА
а
y7/Z
(
С ////Л СУ////Л
ПГТ ПГТД
.р л
п
)7°; . .. Г .- Т...:
JS
2/ 22
I
.Л...тЬ, /г
$ $ $$ $$$$$ $$: $;$:
3 ;5П7 ;б
N WvNSN
///y/A
l//7//y
/y//7 t
Щ;
|КуоС Х М
КУчЧУчУ
kVt/
ГТш ВГТП
ПГТП ПГТД ПтШ
tEL
Фиг.
| Электромагнитное захватное устройство | 1977 |
|
SU703464A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
