05
оо
о
Изобретение относится к холодной обработке металлов давлением и может быть использовано для подачи длинномерного материала в зону обработки.
Цель изобретения - повышение надежности работы и точности подачи.
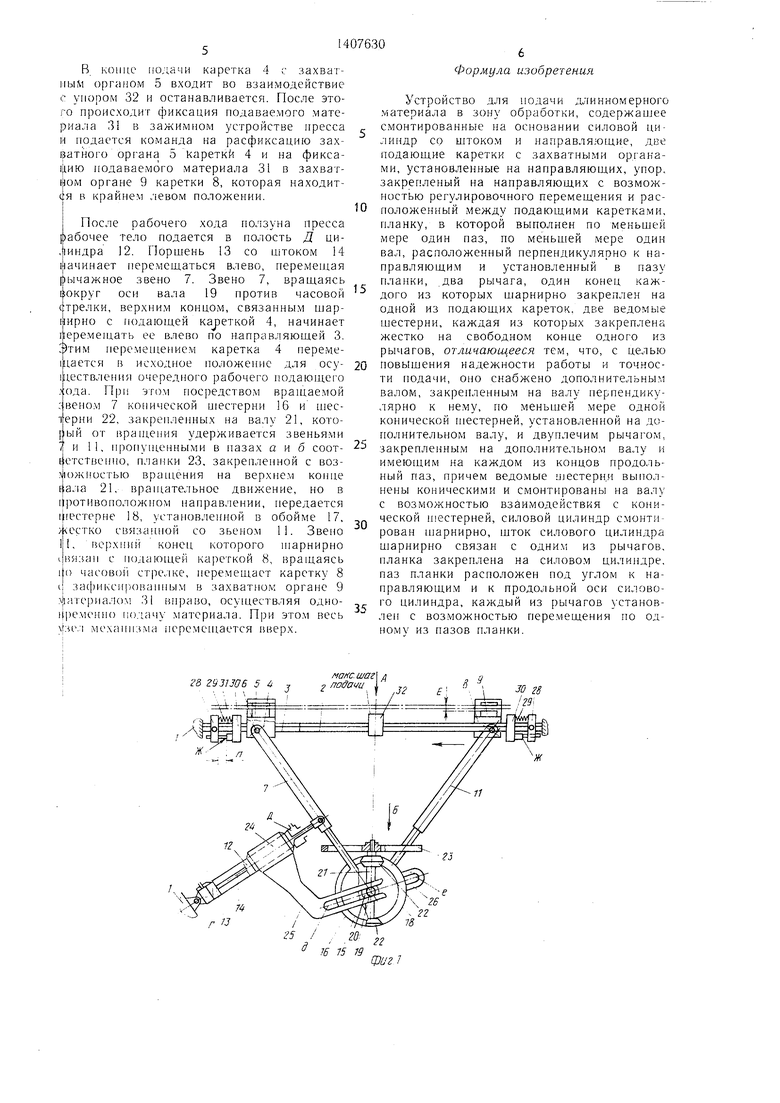
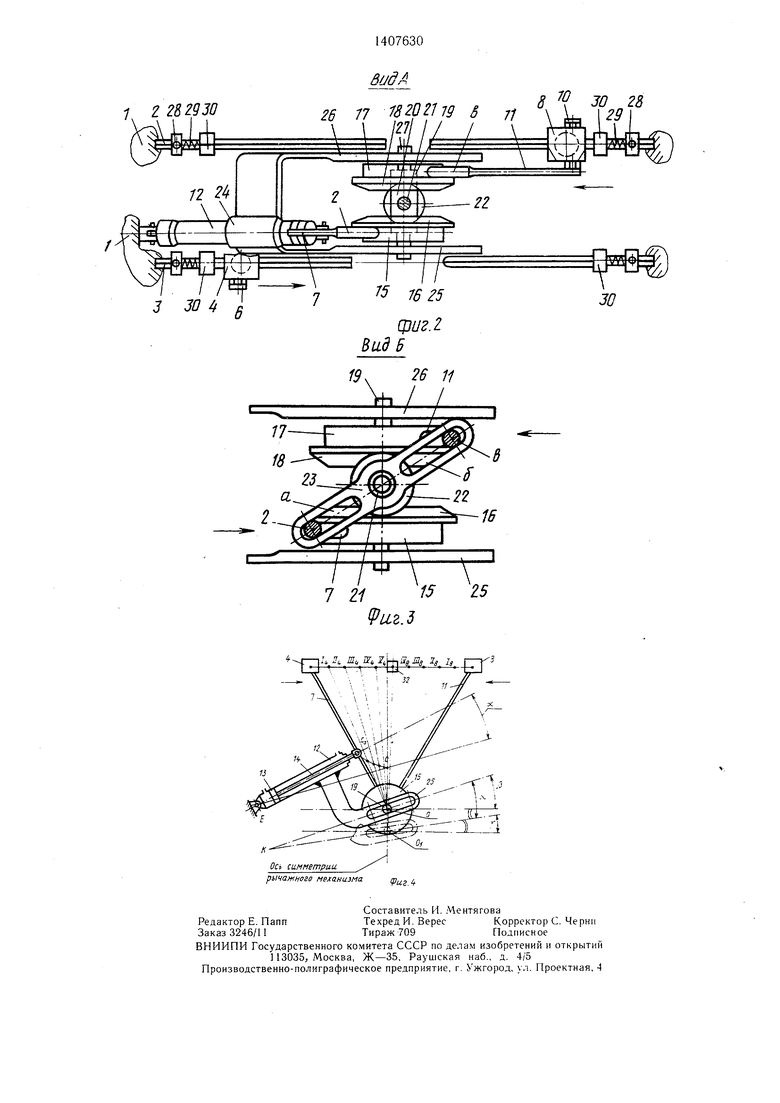
На фиг. 1 изображено устройство для пбдачи длинномерного материала в зону о1)работки; на фиг. 2 -вид А на фиг. 1; ил фиг. 3 - вид Б на фиг. 1; на фиг. 4 -
ветственно, внутри которых расположены концы 27 вала 19. При этом следует отметить, что оси пазов расположены под углом Р к направлению подачи. Это сделано для того, чтобы зафиксировать весь узел (валы 19 и 21 с конически.ми шестернями 16, 18 и 22) от перемещения в направлении подачи (поступательного пе- ремешения по направляющим 2 и 3). Следовательно, наличие пазов дне, распривода силового цилиндра 12 в начале и в конце хода, Р - угол, образованный осью пазов д е ш,ек 25 и 26 соответственно вилки 24 с направлением
этот же угол
траектория движения точек привода и звень- ю положенных под углом р к направлению ев.подачи, является необходимым и достаточУстройство содержит корпус 1 с закреп- ным условием для осуществления подачи Л нными на нем направляющими 2 и 3. На Материала.
направляющей 3 с возможностью перемеш,е- Для обоснования выбора величины угH lH установлена подающая каретка 4с ла Р приняты (фиг. 4) следующие обоз- з,1хватным органом 5, шарнирно закреплен- начения: а угол, образованный осью ная в держателе 6 звена 7, выполнен- нэго в виде рычага, а на направляю- и|1ей 2 аналогично закреплена подающая к|аретка 8 с захватным органом 9, шарн рно закрепленная в держателе 10 звена 20 подачи в начале хода, 1|1, выполненного в виде рычага. На кор-в конце хода.
nf/ce 1 шарнирно закреплен цилиндр 12 при-Для повышения надежности работы уствЬда, внутри которого расположен порщеньройства (исключения заклинивания при знаip со щтоком 14, причем последний щар-чении р, приближающемся к 0°, так как в
н|ирно связан со звеном 7, являющимсяэт.лом случае весь рычажный механизм
в)едущим звеном рычажного механизма. 25 стремится сместиться в направлении дви- /)ругой конец звена 7 посредством обой- ь 15 жестко связан с конической зуб- ч|атой и1естерней 16, которая неподвижно зркреплеЕ: в обойме, аналогично другой ко- н{ец звена 11 посредством обоймы 17 я|сестко связан с шестерней 18. Обе шее- т|ерни 16 и 18 обращены зубьями друг К| другу и с возможностью вращения сносно закреплены на валу 19, снабжен- i-joM ступенью 20, и его ось расположе- перпендикулярно направлению движен-ия ь|аретки (фиг. 1). На валу 19 на участке с тупени 20 посередине между щестернями 1|б и 18 перпендикулярно к оси вала 19 v по оси симметрии рычажного механиз- неподвижно закреплен вал 21 (фиг. 1
И 2), на котором с возможностью вра- 40 креплены перемещаемые фиксаторы 28, 1Цения закреплена по меньщей мере однаснабженные пружинами 29, выполняющими
Коническая щестерня 22. Шестерни 22 кинематически связывают между собой шестерни 16 и 18. На верхнем конце вала 21 с возможностью вращения закреплен горизонтально двуплечий рычаг, выполжения щтока приводного цилиндра и может произойти заклинивание важно, чтобы в процессе осуществ.1ения подачи р всегда был больше 0°.
Так как вилка 24 жестко связана с цилиндром 12, то ось пазов поворачивается относительно горизонтали также на угол а, следовательно, необходимым и достаточным условием исключения заклинивания в процессе подачи является выполнение условия . Для гарантии выполнения этого условия и с учетом исключения влияния люфтов в узлах рычажного механизма принято Р(х-|-5°.
На направляющих 2 и 3 попарно за45
менный в виде планки 23, снабженной симметричными пазами а и б, внутри которых размещены звенья 7 и 11, соответственно имеющие на длине взаимодействия с пазами криволинейные поперечные - (Сечения г и в (в предлагаемом варианте исполнения сечения круглые).
роль пружинных компенсаторов, подвижными упорами 30, которые снабжены опорными буртиками ж. В исходном положении (т. е. когда пружины 29 сжаты и буртики ж взаимодействуют с фиксаторами 28) подвижные упоры 30 удерживаются с помощью специальных защелок (не показаны). Фиксация атериала 31 осуществляется в захватном органе 5.
На направляющей 3 с возможностью перемещения вдоль нее, установлен упор 32, используемый для регулирования шага подачи.
Устройство работает следующим образом.
Перед началом работы с -помощью фикПланки 23 фиксируют положение вала :21 от вращения вместе с щестернями
22 вокруг вала 19. На цилиндре 12 не-55 саторов 28 и упора 32 устанавливают треподвижно закреплена планка, выполненнаябуемый шаг подачи (с учетом перемещения
8 виде вилки 24 со щеками 25 и 26,подвижных упоров 30 до взаимодействия
которые снабжены пазами d и е соот-их буртиков ж: с фиксаторами 28).
ветственно, внутри которых расположены концы 27 вала 19. При этом следует отметить, что оси пазов расположены под углом Р к направлению подачи. Это сделано для того, чтобы зафиксировать весь узел (валы 19 и 21 с конически.ми шестернями 16, 18 и 22) от перемещения в направлении подачи (поступательного пе- ремешения по направляющим 2 и 3). Следовательно, наличие пазов дне, распривода силового цилиндра 12 в начале и в конце хода, Р - угол, образованный осью пазов д е ш,ек 25 и 26 соответственно вилки 24 с направлением
этот же угол
ла Р приняты (фиг. 4) следующие обоз- начения: а угол, образованный осью
подачи в начале хода, в конце хода.
стремится сместиться в направлении дви-
креплены перемещаемые фиксаторы 28, снабженные пружинами 29, выполняющими
жения щтока приводного цилиндра и может произойти заклинивание важно, чтобы в процессе осуществ.1ения подачи р всегда был больше 0°.
Так как вилка 24 жестко связана с цилиндром 12, то ось пазов поворачивается относительно горизонтали также на угол а, следовательно, необходимым и достаточным условием исключения заклинивания в процессе подачи является выполнение условия . Для гарантии выполнения этого условия и с учетом исключения влияния люфтов в узлах рычажного механизма принято Р(х-|-5°.
На направляющих 2 и 3 попарно за5
-
роль пружинных компенсаторов, подвижными упорами 30, которые снабжены опорными буртиками ж. В исходном положении (т. е. когда пружины 29 сжаты и буртики ж взаимодействуют с фиксаторами 28) подвижные упоры 30 удерживаются с помощью специальных защелок (не показаны). Фиксация атериала 31 осуществляется в захватном органе 5.
На направляющей 3 с возможностью перемещения вдоль нее, установлен упор 32, используемый для регулирования шага подачи.
Устройство работает следующим образом.
Перед началом работы с -помощью фик5 саторов 28 и упора 32 устанавливают тре
В исходном положении Г1одв1|,-;м,ые уноры установлены на защелки (бур гиками ж взаимодействуют с фиксаторами 28). а ио- дающие каретки 4 и 8 находятся каждая в крайнем положении левом и пра- вом соответственно и при этом в;;аимо- действуют с унорами 30, а оба захватных органа кареток нахс/дятся в рас- фиксированном состоянии. В наччч.ю .fxiocтого хода ползуна вверх) посред; i ); кинематически связанного с ним 1 лачк;1 в
системе уг1ра1.1ения подается команда на фиксацию материала 31 в захватном ор- 1 ане 5 иодаюн1ей каретки 4 и уборку зан1,елок, удерживаюн1,их подвижн1 1с упоры 30, а с некоторым за медлен ие.1 (0,5-- 1,0 с) через реле времени соответствующий клапан системы управления (не показана) соединяет полость г снловог о цилиндра 12 с напорной магистралью системы, при этом полость Д цилиндра соединяется со сливной магистралью. При этом следует отметить, что в свободном состоянии упоры 30 под воздействием пружины 29 стре.мятся переместиться друг другу навстречу на величину п. Это обстоятельство играет положительную роль для работы устройства: так как упоры 30 вы свобож- даются непосредственно перед началом подачи, то уменыиается время на преодоление трения покоя, что увеличивает скорость воздействия устройства, кроме того, под воздействием пружин 29 (усилие 5- 8 кгс каждая-) в начале подачи выбираются все люфты (между зубьями конических передач, в пазах а, б и т. д.), что способствует новьинению точности подачи. Таким образо.м, наличие пружин 29 ноз- воляет компенсировать неточности нодачи, которые могут иметь место за счет, люф- то в.
При подаче рабочей среды (воздуха или жидкости) i . lio. iocTb / цилиндра 12 поршень 13 со IJITOKOM 14 начинает перемещаться вправо и на П1арнир С пере- дается сила Q, направленная но оси штока 14 под KOHK|) jTiHjiM углом к оси звена 7. Если силу Q разложить на две составляющие: N по направ;1ению звена 7 и R перпеидикуля)ную к нему, то оче- видно, что BC iVxiuiK конец звена 7 с кареткой 4, которая установлена на направляющей 3 будет перемещаться в ту же сторону, что и нггок 14, т. е. вправо, осуществляя подачу материала 31.
Перемещаясь вправо, шток 14 одновременно участвует во вращательном движении цилиндра 12 но часовой стрелке, опускаясь вниз и вращая при это.м звено 7 вокруг оси вала 19.
При вращении звена 7 верхний его конец, щарнирно связанный с нодающей кареткой 4, перемешает последнюю по направляющей 3 вправо, осуществ.тяя пода0
5
п
5 О 5
8.
чу материа, 1а 31, а ini/i-.iniii ,-;i;fii:i 7 вращает коническую uiecrcpiiio iii по часовои стре, 1ке вокру: Ba.ia 19. nptii i;;s;c:. liivCTcji- ня 16 взаимодейсгьхч г ч кс-нм-м с.чими iiicc- -тернями 22, KOTOI IVIC. оси вала 2. взанл одсйствующсГ с и- чакремлоннон в ) .о : акро::.(; 1чО1;сц ; ; 1
ЛЛ с
к
шестерни 22 сгремится. 11О1;е;11 iia котор.о.м они liaKpcn.uMiiii, н и вращения ведх щего звена 7. т. во 11 CTjie. iKe.
Но :-1акре11. е Г|1ая на оллс.м ,л к() Ba.ia 21 (i; 11редла1 аемг1М г.ар Ианге на верх11е) с по: можностыо в|1г1щоинк n. iaH- ка 23, вну ри Г1а:и)в ,; i; Г) KOTOpoii пропущены звенья. 7 и 11 соот1 етственно посредством : ве11ьев у, на. 21, пр()нун1енныГ1 CKiiOjh Ba. i 19 ii нс:;(;;вижн() : акрен.1ениьп1 в нем, неио::дик но и: но оси симметрии р1)1ча: Кно1ч ) M0 aiiii.-;.,;i (. I и 3). Фиксация ва. м 21 в ич.ю- женин (но оси С1.мме грии р1)1ча кно| о механнзма) ос щесгн. 1яется за счет гсго. что он ненодвнжно .чак{1еп.-1ен lui. i 19 нсриендикхлярщ) к того, что :u5eiibH 7 н .iiHieihibi.MH сечениями t
)Т с iia.UJMH (7 1
нлан1 и 23 н удер.-кииак) вокрчг isa.ia круг оси ва, 1;
ci о пси.
тельное Д1 И: КС11 11 .-,; ; iio .i ni в которой закреп. ЮНГ июотсрчя I мому звену 11. KoropiH: этом нротив часовой CTpi IKII ним концом, иарпигч: чан дающей кареткой 8. нсремегчаот по напра1.)|це11 2 влево i. i. и 8 начинают lU iH -.ieiua i ьея друг другу).
Р 12
о; по- МОМ
,:-,.
)М верхними ч; стхл-,1 ас io.. в И1сках 2--
о-и стрс.чкс. Т( :(aKpe;i.ieii:UiH 24 лкигается
и 26 ВИ.. 1КИ. C(H:I iierCTBeiiHi;
конц1,1 Ba. ia 19 размещснпы н е, н удерживая ири - от перемещснля ;io три а. п. в ;ecтe с ннм п вес1 узо i icxaiii;.i:.:a. как пазы ) и с paciio, ;;/-i C ibi n;).:, i |3 к наиравле И11о ио.шчн. 1ри ч:ч)М на. с пишется ино.ы.чсл r,iio concTiiCHiu) вниз.
В конце подачи каретка 4 с захват- ныМ органом 5 входит во взаимодействие с уиором 32 и останавливается. После этого происходит фиксация подаваемого мате- )иала 3 в зажимном устройстве пресса м подается команда на расфиксацию зах- Затного органа 5 Каретки 4 и на фикса- ||,ию подаваемого материала 31 в захват- ijoM органе 9 каретки 8, которая находится в крайнем .левом положении.
После рабочего хода ползуна пресса 1абочее тело подается в полость Д цилиндра 12. Поршень 13 со штоком 14 пачинает перемеш,аться влево, перемепдая рычажное звено 7. Звено 7, врандаясь вокруг оси вала 19 против часовой стрелки, верхни.м концом, связанным шар- нирно с подающей кареткой 4, начинает пере.ме1цать ее влево по направляюш.ей 3. Этим пере.меп1епием каретка 4 пере.ме- цается в исходное положение для осу- 1,ествления очередного рабочего подающего ода. При этом носредство.м вращаемой веном 7 конической шестерни 16 и шестерни 22, закрепленных на валу 21, который от врап1епия удерживается звенья.ми t и 11, пропущенными в пазах а и б соот- fjCTcTBenHO, планки 23, закреплепной с воз- 1o кl ocтью вращения па верхнем конце 4ала 21, вращате.льное движение, но в Противоположном направлении, передается 1(1естерне 18, установленной в обойме 17, естко связанной со зьеном 11. Звено 1, ве)Х1П(й конец которого ншрнирпо иязап с подающей кареткой 8, вращаясь о часов(М1 стрелке, перемещает каретку 8 за(|)икс(Г)Овапным в захватно.м органе 9 д|1мгсриалом 31 вправо, осуществляя одно- И1)еменно подачу материала. П|)и этом весь 1зел механизма перемещается вверх.
0
5
0
5
0
5
Формула изобретения
Устройство для подачи длинномерного .материала в зону обработки, содержап ее смонтированные на основании силовой цилиндр со штоком и направляющие, две подающие каретки с захватными органами, установленные на направляющих, упор, закрепленый на направляющих с возможностью регулировочного перемещения и расположенный 1Между подающими каретками, планку, в которой выполнен по меньшей мере один паз, по мены1 ей мере один вал, расположенпый перпендикулярно к направляющим и установленный в пазу планки, два рычага, один конец каждого из которых щарнирно закреплен на одной из подающих кареток, две ведомые шестерни, каждая из которых закреплена жестко на свободном конце одного из рычагов, отличающееся тем, что, с целью Повышения надежности работы и точности подачи, оно снабжено дополнительным валом, закре11ленным на валу перпендикулярно к нему, по меньшей мере одной конической шестерней, установленной па дополнительном валу, и двуплечим рычаг ом, закрепленным па дополпительном валу и имеющим на каждом из концов продольный паз, причем ведо.мые и естерн,.ч выполнены коническими и смонтированы на валу с возможностью взаимодействия с конической шестерней, силовой цилиндр смонтирован шарнирно, шток силового цилиндра шарнирно связан с одни.м из рычагов, планка закреплена на силовом цилиндре, паз планки расположен под углом к на- правляющи.м и к продольной оси силового цилиндра, каждый из рычагов установлен с возможностью перемещения по од- HOMV из пазов планки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи длинномерного материала в зону обработки | 1985 |
|
SU1266614A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1988 |
|
SU1538968A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1983 |
|
SU1098623A1 |
| Устройство для подачи листового материала в рабочую зону пресса | 1979 |
|
SU871934A1 |
| Комплекс для штамповки деталей из полосового и ленточного материала | 1983 |
|
SU1199379A1 |
| Устройство для сборки деталей запрессовкой | 1984 |
|
SU1269962A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1981 |
|
SU1024139A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Устройство для подачи листового материала в зону обработки | 1981 |
|
SU988427A1 |
Изобретение относится к холодной обработке металлов давлением и может быть использовано для подачи полосового и ленточного материала в зону обработки. Цель - повышение надежности работы и точности подачи. Материал подается в зону обработки подаюш.и.ми каретками. Подагошие каретки перемещаются по направляющим. Шаг подачи регулируется регулируемым упором, закрепленным на направляющих и расположенным .между подающими каретками. На каждой из кареток шарнирно закреплен одним концом рычаг. На других концах рычагов жестко закреплены ведомые конические шестерни.Они установлены на валу, расположенном перпендикулярно направляющим. Вал перемещается по пазу планки. Паз планки расположен под углом к направляющим. Планка закреплена на силовом цилиндре, щар- нирно установленном на основании. Шток силового цилиндра шарнирно связан с одним из рычагов. На валу перпендикулярно к нему закреплен дополнительный вал, несущий конические шестерни, входящие в зацепление с ведомыми коническими шестерня.ми. На дополнительно.м валу установлен двуплечий рычаг с пазами на его концах. Рычаги перемещаются по пазам двуплечего рычага. 4 ил. S сл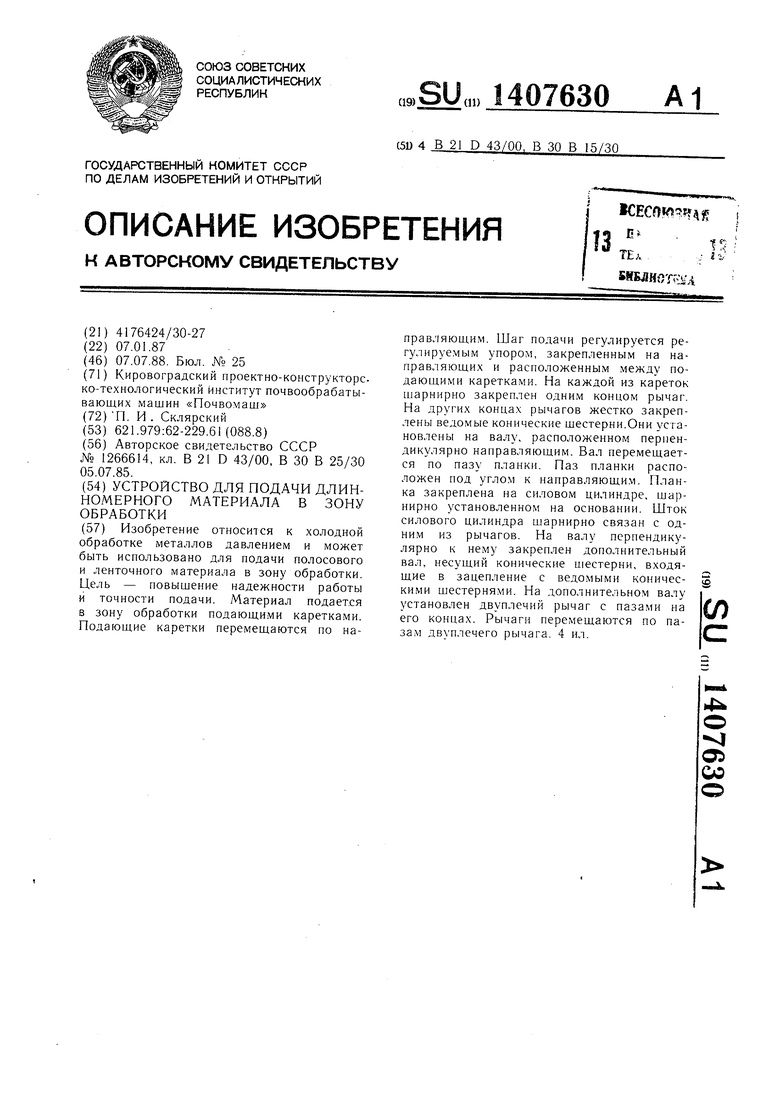
мокс.шаг д 28293U065U J 2 , fi
3 1к
16 15 79
30 г§
29(
фиг I
7 2282930
А
26 77 B2Q21l9 & ,; 1 f /
.7 // /
3 30 It
рычан ного механизмаqj
Составитель И. Ментягова
Редактор Е. ПаппТехред И. ВересКорректор С. Черни
Заказ 3246/11Тираж 709Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
2Q21l9 & ,;
.7 // /
fc
5 76 25
.1
Вид 6
30
S 5
| Устройство для подачи длинномерного материала в зону обработки | 1985 |
|
SU1266614A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
