О5
00
N9
Изобретение относится к обработке jvie- rajL. KJB давлением у может быть иеполь- Зовано для перемещения заготовок между рабочими позициями многопозиционного пресса.
Цель изобретения - расширение техно- |1огических возможностей путем подачи заго- ITOBOK различной конфигурации и повышение aдeжнocти работы.
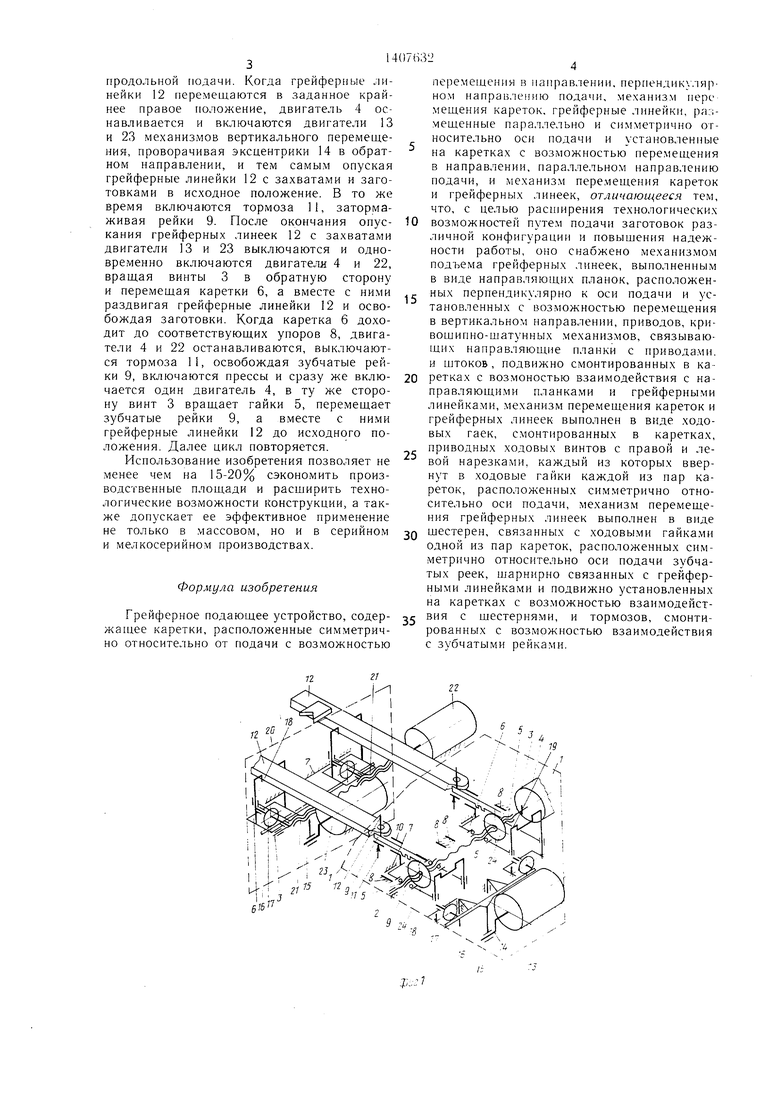
На фиг. 1 изображено грейферное по- даюшее устройство; на фиг. 2 - установ- а грейферного подаюшего устройства у тресса; на фиг. 3 - установка грейфер- ыx подаюших устройств в линии для штам- 10ВКИ деталей.
Грейферное подаюш,ее устройство содер- .кит корпус 1, подшипниковые опоры 2, ходовые винты 3, электродвигатель 4, ходовые гайки 5, каретку 6, направляющие 7, 7порь 8, зубчатые рейки 9, направляющие О, тормоза 11, грейферные линейки 12, электродвигатель 13, эксцентрик 14, криво- ципно-шатунный механизм 15, направляю- цие планки 16, ролики 17, штоки 18, направляющие 19, корпус 20, ходовые гайки 21, электродвигатели 22 и 23, шестер- |)и 24.
Корпуса 1 и 20 грейферных линеек 12 Расположены по обе стороны от пресса 5 ряда прессов 26. В корпусе 1 располо- |кен механизм продольно-поперечного перемещения, состоящий из установленного в подшипниковьЕХ опорах 2 перпендикулярно фронту прессов 26 винта 3 с правой и левой нарезкой, жестко связанного с :)лектродвигателем 4, управляемым от ЭВМ не показана), снабженного двумя ходовыми Гайками 5 соответственно с правой и .ревой нарезкой, каждая из которь х перемещает: соответствующую каретку 6 в про- ивоположные стороны по напавляющим 7 Параллельно оси винта 3 до соответствую- цих регулируемых упоров 8, установленных на корпусе 1 по обе стороны от каждой каретки 6. Шестерни 24 каждой гай- Ки 5 контактируют с соответствующей зубчатой рейкой 9, установленной в направляющих 10 каретки 6, снабженной тормозом 1 1 и щарнирно связанной с соответствующей грейферной линейкой 12. В корпусе 1 первого блока расположен также механизм вертикального перемещения, представляющий собой электродвигатель 13, управляемый от ЭВМ (не показана), ус- гановленный под двигателем 4 и параллельно ему и имеющий на своем валу эксцентрик 14, связанный шарнирно через кривошипно-шатунный механизм 15 с планкой 16, контактирующей через ролики 17, щтоки 18, вертикально расположенные в отверстиях кареток 6, с горизонтальными Направляющими 19 грейферных линеек.
В корпусе 20 размещаются второй такой же механиз.м вертикального перемещения от электродвигателя 23 и приводимый в
5
0
5
5 - 0 5 5
0
движение от электродвигателя 22 механизм поперечного перемещения, который, в отличие от механиз.ма продольно-поперечного перемегцении, не имеет шестерен.
Вместо последних на другом аналогичном винте 3 установлены ходовые гайки 21, жестко связанные с соответствующими каретками 6. В корпусе 20 нет упоров 8, зубчатых реек 9 и тормозов 11. Приводные валы всех механизмов перемещения - вертикального, продольно-поперечного и поперечного - в корпусах 1 и 20 - жестко связаны непосредственно с соответствующими электродвигателями 13, 23, 4 и 22, оси вращения которых параллельны между собой и расположены перпендикулярно фронту прессов.
Грейферное подающее устройство работает следующим образом.
В исходном положении грейферные линейки 12 раздвинуты, опущены и смещены в левое крайнее положение.
При этом в корпусе зубчатые рейки 9 заторможены тормозами 11 и благодаря зубчатому зацеплению препятствуют вращению гаек 5 с щестернями 24.
При включении двигателей 4 и 22 винты 3 начинают вращаться и пере.ме- щают благодаря гайкам 5 и шестерням 24 корпуса 1 и гайкам 21 корпуса 20 пару кареток 6 навстречу друг другу, а вместе с ними всю связанную с ними систе.му и грейфеные линейки 12 навстречу друг л фугу до тех пор, пока по команде от ЭВМ не поступит ко.манда .«Останов двигателям 4 и 22. При этом каретки 6 корпуса I входят в соприкосновение с соответствующими упорами 8, а захваты грейферной линейки 12 зажимают заготовки (не показано). После этого включаются оба двигателя 13 и 23 механизмов подъема, поворачивая эксцентрики 14 на заданный ЭВМ угол и прижимая через кривощипио-щатунный механизм 15 планку 16, контактирующие с роликами 17 штоки 18 и направляющие 19. Грейферные линейки 12 осуществляют подъем зажатых захватами заготовок вверх.
При достижении заданной величины подъема выключаются двигатели 13 и 23 и тор.моза 11 и включается один двигатель 4 механизма продольно-поперечного перемещения, который вращает винт 3 корпуса 1 в ту же сторону. Так как дальнейшему перемещению кареток 6 препятствуют соответствующие упоры 8, а рейки 9 расторможены и не препятствуют вращению гаек 5, то последние, вращаясь вместе с винтом 3, перемещают через эксцентрики 14 зубчатые рейки 9 по направляющим 10 кареток 6 вправо, перемещая щарнирно связанные с рейками 9 грейферные линейки 12, а соответственно, и заготовки на заданную величину щага
продольной подачи. Когда грейферные линейки 12 перемещаются в заданное крайнее правое ноложение, двигатель 4 ос- навливается и включаются двигатели 13 и 23 механизмов вертикального перемещения, проворачивая эксцентрики 14 в обратном направлении, и тем самым опуская грейферные линейки 12 с захватами и заготовками в исходное положение. В то же время включаются тормоза 11, затормаживая рейки 9. После окончания опус- кания грейферных линеек 12 с захватами двигатели 13 и 23 выключаются и одновременно включаются двигате ти 4 и 22, вращая винты 3 в обратную сторону и перемещая каретки 6, а вместе с ними раздвигая грейферные линейки 12 и освобождая заготовки. Когда каретка б доходит до соответствующих упоров 8, двигатели 4 и 22 останавливаются, выключаются тормоза 11, освобождая зубчатые рейки 9, включаются прессы и сразу же вклю- чается один двигатель 4, в ту же сторону винт 3 вращает гайки 5, перемещает зубчатые рейки 9, а вместе с ними грейферные линейки 12 до исходного положения. Далее цикл повторяется.
Использование изобретения позволяет не менее чем на 15-20% сэкономить производственные площади и расщирить технологические возможности конструкции, а также допускает ее эффективное применение не только в массовом, но и в серийном и мелкосерийном производствах.
Формула изобретения
Грейферное подающее устройство, содер- 5 жащее каретки, расположенные симметрично относительно от подачи с возможностью
перемещения в направлении, перпендикхмяр- ном направлению подачи, механизм lepc мещения кареток, грейферные линейки, ра;;- мещенные параллельно и симметрично относительно оси подачи и установленные на каретках с возможностью пере.мещения в направлении, параллельном направлению подачи, и механиз.м пере.мещения кареток и грейферных линеек, отличающееся тем, что, с целью расширения технологических возможностей путем подачи заготовок различной конфигурации и повьпиения надежности работы, оно снабжено механизмом подъема грейферных линеек, выполненным в виде направляющих планок, расположенных перпендикулярно к оси подачи и установленных с возможностью перемещения в вертикальном направлении, приводов, кри- вощипно-шатунных механизмов, связывающих направляющие планки с приводами. и щтокоБ, подвижно смонтированных в каретках с возмоностью взаимодействия с направляющими планками и грейферными линейками, .механизм перемещения кареток и грейферных линеек выполнен в виде ходовых гаек, смонтированных в каретках, приводных ходовых винтов с правой и левой нарезками, каждый из которых ввернут в ходовые гайки каждой из пар кареток, расположенных симметрично относительно оси подачи, механизм перемещения грейферных линеек выполнен в виде щестерен, связанных с ходовыми гайками одной из пар кареток, расположенных симметрично относительно оси подачи зубчатых реек, щарнирно связанных с грейферными линейками и подвижно установленных на каретках с воз.можностью взаимодействия с щестернями, и тормозов, смонтированных с возможностью взаимодействия с зубчатыми рейками.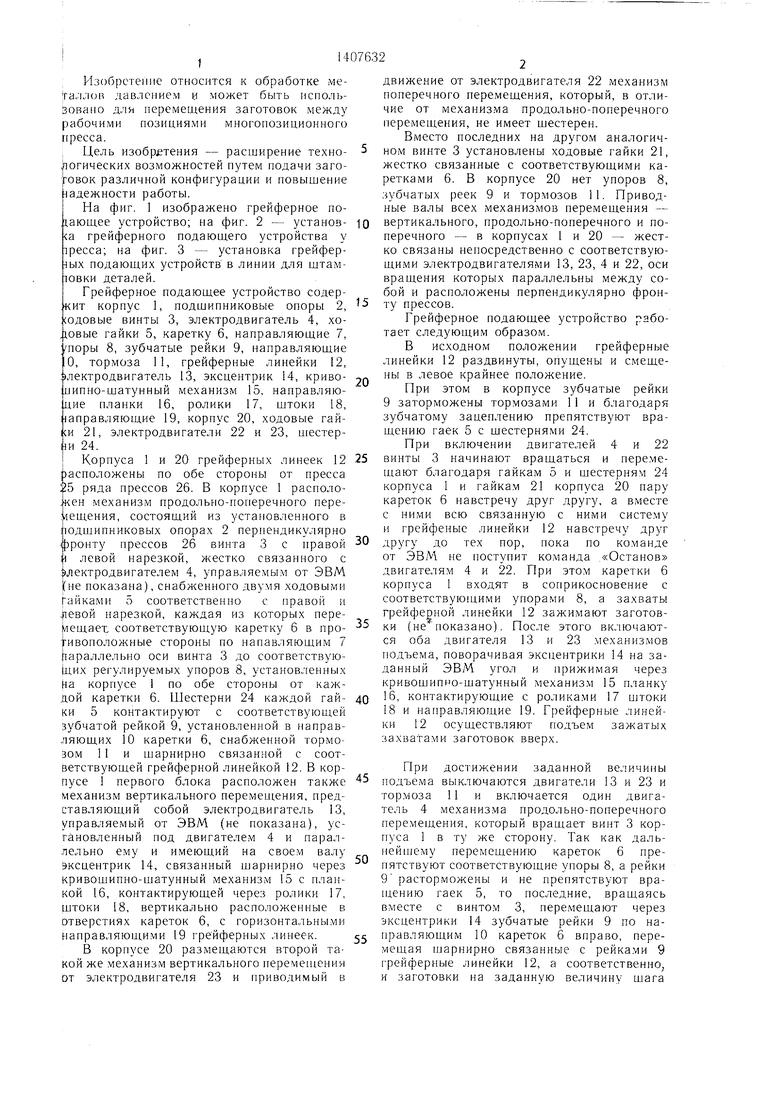
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Устройство для транспортировки листового материала вдоль линии прессов | 1975 |
|
SU555951A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| Грейферное подающее устройство | 1987 |
|
SU1417976A1 |
| Грейферная подача для транспортировки листового материала вдоль линии прессов | 1983 |
|
SU1090475A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Устройство для привода подающей линейки для многопозиционного пресса | 1986 |
|
SU1741603A3 |
| Грейферное подающее устройство | 1987 |
|
SU1438892A1 |
| Устройство для перемещения материала | 1987 |
|
SU1447493A1 |
| Грейферное устройство для перемещения штучных заготовок между рабочими позициями многопозиционного штампа | 1990 |
|
SU1731373A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для перемещения заготовок между рабочими позициями многопозиционного пресса. Цель - расширение технологичес-- ких возможностей путем подачи заготовок различной конфигурации и повышение надежности работы. Заготовки перемешаются в вертикально.м и горизонтальном направлениях захватами. Захваты закреплены на грейферных линейках, расаположенных симметрично и параллельно оси перемещения заготовок. Грейферные линейки установлены в ползушках. Ползушки смонтированы на каретках с возможностью перемещения в направлении, перпендикулярном оси перемещения заготовок. На одной из кареток закреплены зубчатые рейки, входящие в зацепление с зубчатыми колесами (шестернями), смонтированными в одной из кареток. Каретки приводятся в возвратно-поступательное движение в вертикальном направлении от индивидуальных приводов через кривошилно-шатунные механизмы. Ползушки приводятся в движение от двух ходовых винтов с правой и левой нарезками, связанных с приводами. Ходовые гайки одного из ходовых винтов связаны с зубчатыми колесами (шестернями). Грейферные линейки перемещаются в вертикальном направлении от приводов через кривошипно-шатунные механизмы, направляющие планки и ШТОКИ- 3 ил. i (Л
AV ,.:
uj,j7/ ,/
7
9 :-...
75
20 12.
иг.г
П 20
Vuz.3
26 2.6
L
| Грейферное устройство для подачи штучных заготовок | 1976 |
|
SU571333A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
