(Л
Изобретение относится к транспортным роботизированным системам, в частности к манипуляторам с ручным и автоматизированным управлением, вы- полняющим транспортные- технологические операциис
Целью изобретения является снижение энергопотребления за счет использования единого централизованного привода подвижных элементов.
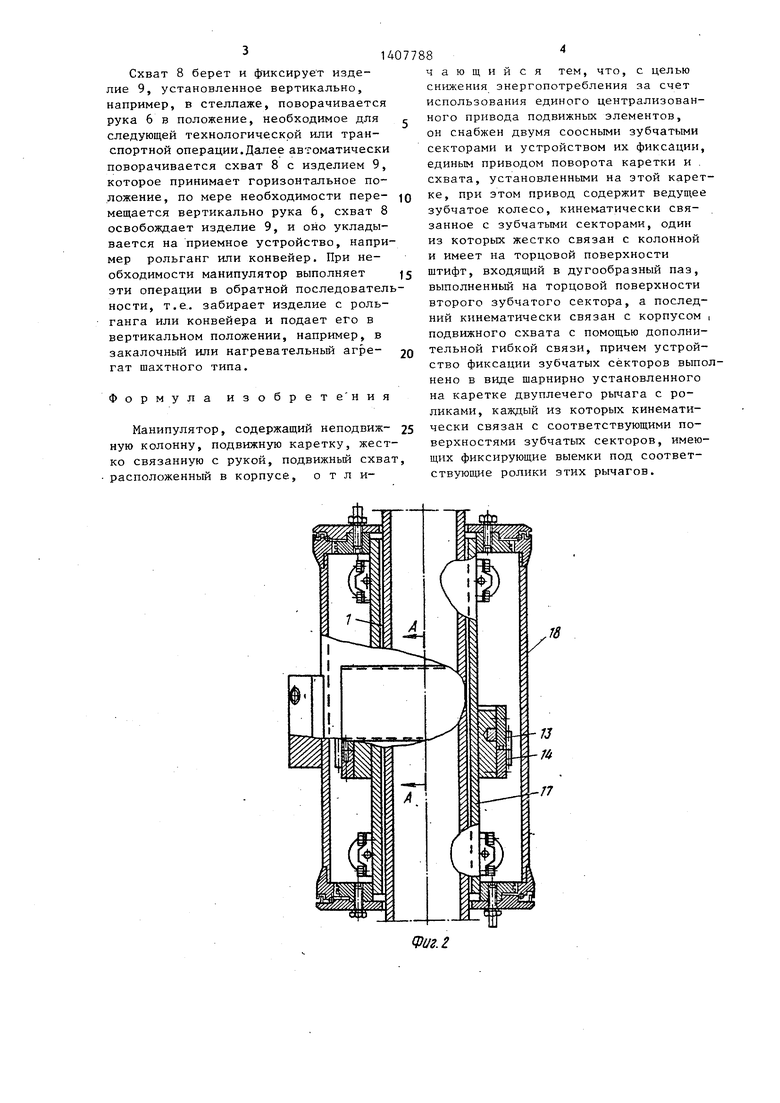
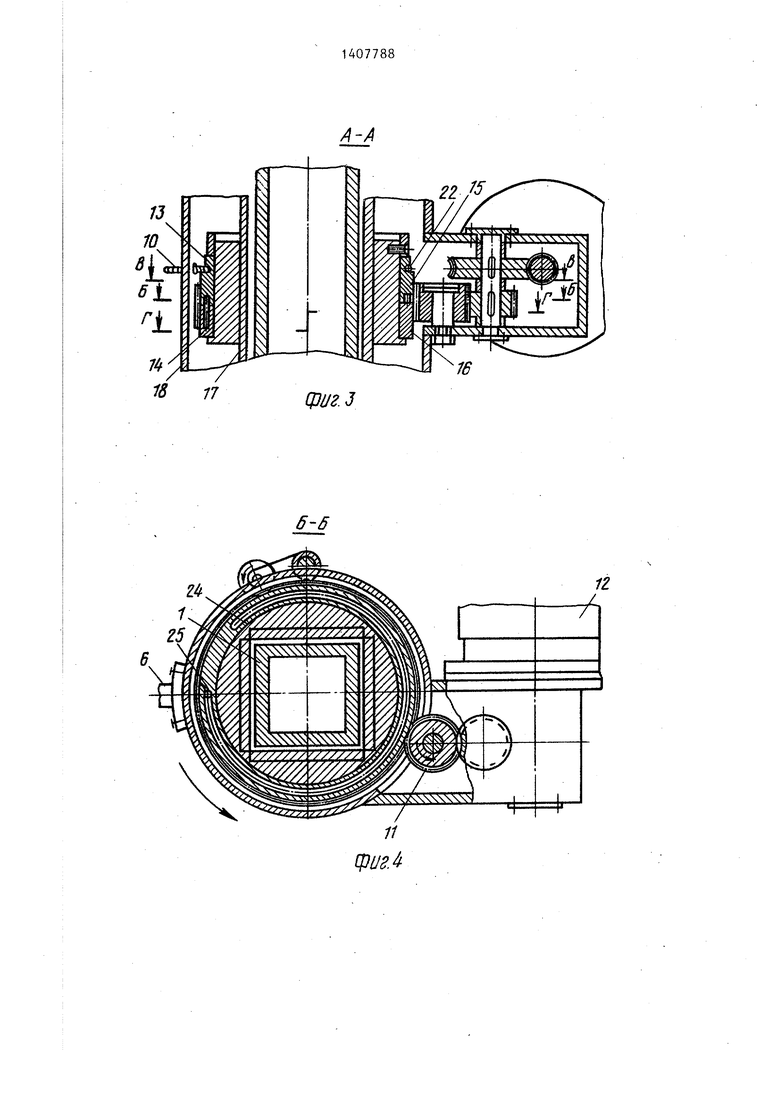
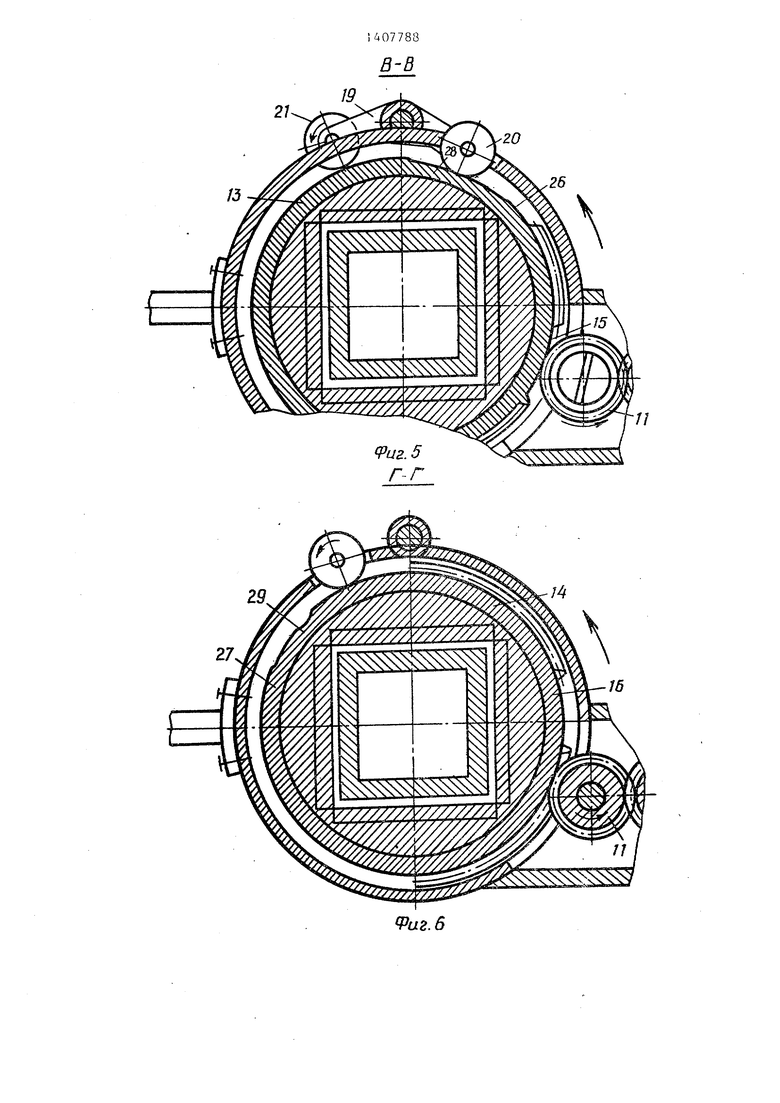
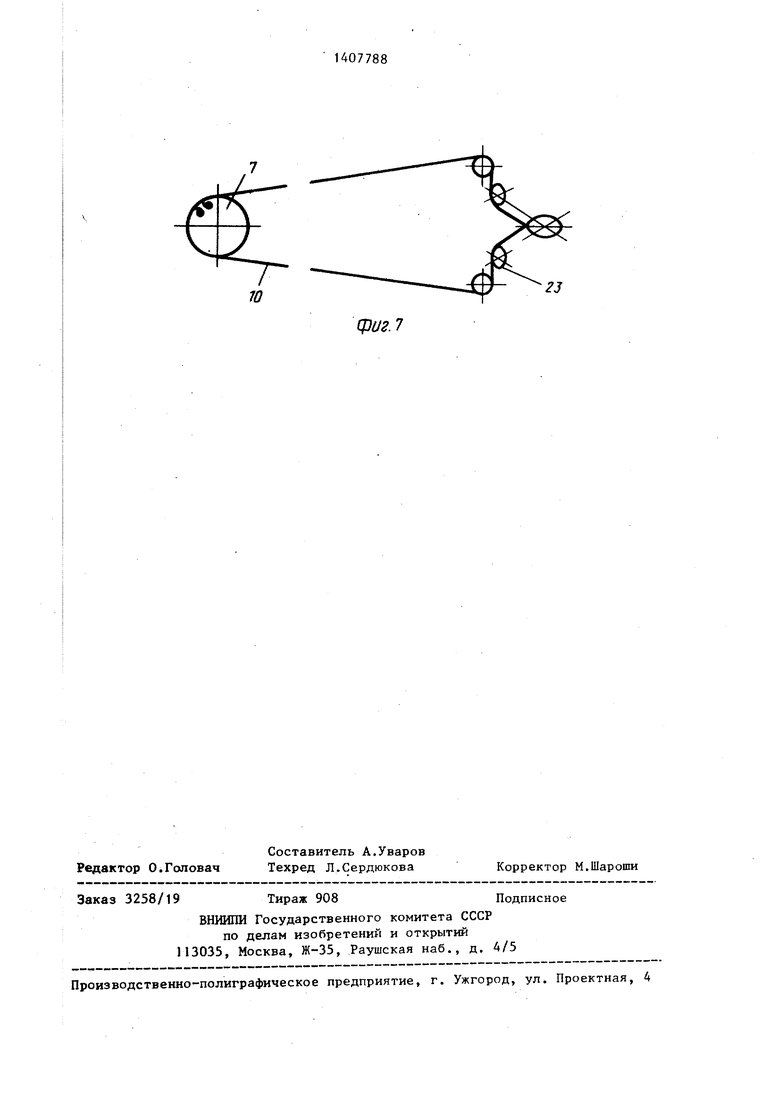
На фиг, 1 изображен манипулятор,общий видена фиг,2 - узел сочленения каретки с колонной; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5- разрез В-В на фиг. 3| на фиг. 6 разрез Г-Г на фиг. 3} на фиг. 7 - схема запа- совки гибкой связи.
Манипулятор содержит несущую ко- лонну 15 на которой установлена подвижная каретка 2, имеющая возможность вертикального перемещения вдоль колонны 1 за счет механизма 3 подъема, установленного на плите 4, и по- ворота за счет механизма 5 поворота. На каретке 2 закреплена рука 6, на конце которой смонтирована поворотная головка 7,несущая на себе схват 8,в
корпусе которого находится транспортируемое изделие 9. Поворотная головка 7 соединена гибкой связью 10 с механизмом 5 поворота, который является общим для поворота руки 6 вокруг колонны 1 и головки 7 относительно руки 6,
Механизм 5 поворота содержит ведущее зубчатое колесо 11, кинематичеки связанное с приводным двигателем 12, колеса 13 и 14 с участками 15 и 1Ь вырезанных зубьев, коробку 17, трубу 18, гибкую связь 10, и устройство фиксации участков 15 и 16 с вырезанными зубьями относительно руки 6, выполненное в виде шарнирно установленного на трубе 18 двуплечего рычага 19, содержащего на концах ролики 20 и 21.
В колесе 13 выполнен паз 23.5 в который укладывается гибкая связь 10, жестко закрепляющаяся на этом колесе, Гибкая связь 1U проходит через обводящие ролики 23 к схвату 8, где жестко крепится на головке 7. При повороте колеса 13 через гибкую связь движение передается схвату 8, происходит его поворот и, следовательно, изделия 9. Колесо 14 неподвижно за
Q
5
0 5
0
5
Q
0
креплено на коробке 17, и при обкатывании ее ведущим колесом 11 происходит поворот трубы 18 и, следователь-I но, руки 6 относительно колонны 1.
Для того, чтобы ведущее колесо 11 поочередно вращало колеса 13 или 14, в них выполнены участки 15 и 16 с вырезанными зубьями. Когда ведущее колесо 11 находится в зоне участка 15 .(фиг. 5), происходят обкатывание колеса 14 и, следовательно, поворот руки 6.
При этом участок 15 с вырезанными зубьями во время поворота находится напротив ведущего колеса 11, т.е. колесо 13 поворачивается вокруг коробки 17. Этот процесс происходит до тех пор, пока дугообразный паз 24, выполненный на торцовой поверхности колеса 13, не упрется в дополнительный щтифт 25, установленный на торцовой поверхности колеса 14 (фиг. 4). Достигнув участка 16 с вырезанными зубьями, колесо 14 выходит из зацепления с ведущим колесом 11, и поворот руки 6 прекращается. При этом колесо 13 входит в зацепление с ведущим колесом 11 и осуществляется поворот схвата 8 с закрепленным на нем изделием 9.
На трубе 18 установлен двуплечий рычаг 19 с роликами 20 и 21, а на колесах 13 и 14 вьтолнены беговые дорожки 26 и 27 с фиксирующими выемками 28 и 29, по которым катаются зти ролики. При повороте руки 6 ролик 22 находится на беговой дорожке 27 и обкатывает ее, а ролик 21 находится в выемка 26 и фиксирует колесо 13 относительно ведущего колеса 11 (фиг. 5). При переключении зацепления с колеса 14 на колесо 13 ролик 22 на беговой дорожке 27 фиксирует положение колеса 14 относительно ведущего колеса 11, а ролик 21 выходит из выемки 28 на беговой дорожке 26 и обкатывает ее, при этом фиксируется положение руки 6 относительно колонны 1.
Таким образом, обеспечивается переключение привода поворота руки 6 на поворот транспортируемого изделия 9. При изменении направления вращения приводного двигателя 12 процесс поворота руки 6 и корпуса схвата 8 с изделием 9 происходит в обратной последовательности.
Манипулятор работает следующим образом.
/J
фиг.з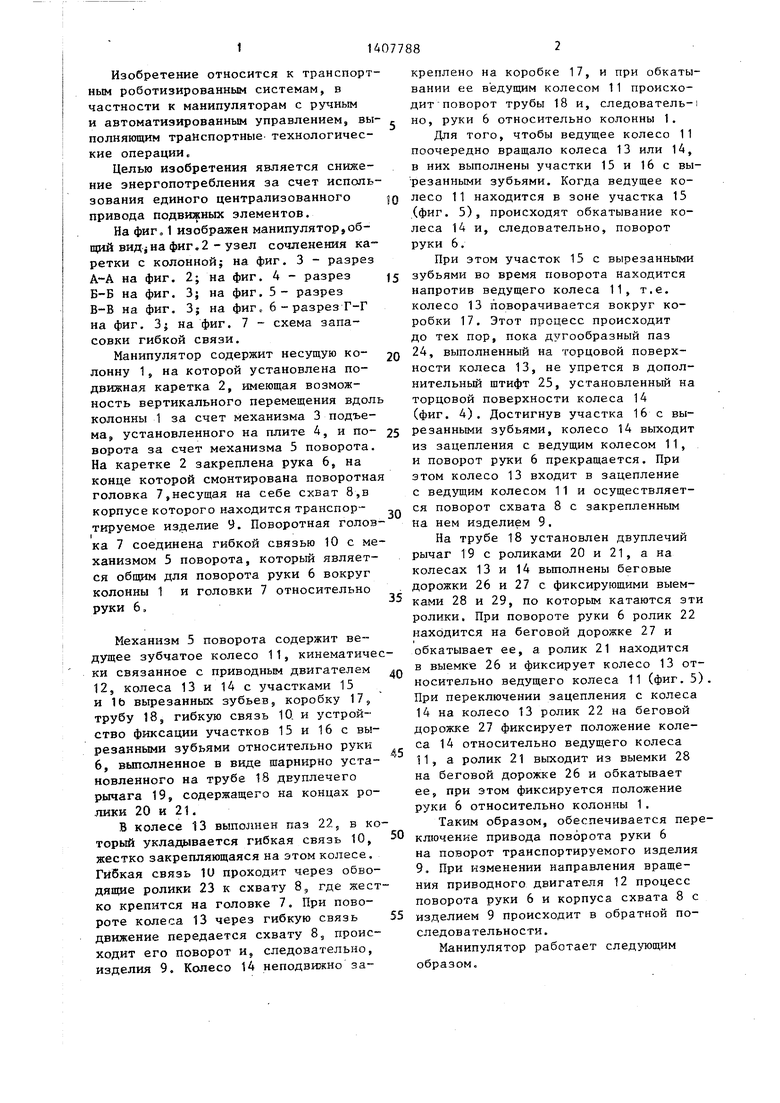
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погружения и вывода термопары из ковша | 1981 |
|
SU1199436A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Установка для сварки объемных изделий с криволинейными поверхностями | 1980 |
|
SU867584A1 |
| Автоматический манипулятор для расклад-Ки шТучНыХ издЕлий B МНОгОпОзициОННуюТАРу | 1979 |
|
SU837856A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Привод манипулятора | 1982 |
|
SU1144877A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Ведущая стойка вращателя | 1987 |
|
SU1496979A1 |
Изобретение относится к области транспортных роботизированных систем, в частности к манипуляторам с ручным и автоматизированным управлением, вьтолняющим транспортные технологические операции. Целью изобретения является снижение энергопотребления за счет использования единого централизованного привода подвижных элементов. При вращении привода, установленного соосно механизму 5 поворота руки 6, осуществляется поворот руки 6относительно колонны 1. Движение схвата 8 осуществляется от того же привода и передается на схват за счет гибкой связи 10 при помощи специального зубчатого механизма, смонтированного в подвижной каретке 2. Подъем и опускание руки осуществляются от механизма 3, имеющего свой привод. 7ил, €
z
21
25
иг.6
23
фиг. 7
| Современные промьшшенные роботы | |||
| Каталог./Под ред | |||
| Ю.Г | |||
| Козьфева, Я.А | |||
| Шифрина | |||
| - М.: Машиностроение, 1984. |
