ША
О
;о
ор ел
о
1Ч
Изобретение относится к измери- тельной технике, а именно к способам контроля контуров с помощью измерительных роботов, и является усовершенствованием известного способа по основному авт.св. № 1254279.
Цель изобретения - повьшение точности контроля.
На чертеже изображено движение измерительной головки относительно контролируемого контура.
Контроль контура 1 в точках 2, 3 4 и 5 вьтолняют с помощью последовательности поисковых траекторий 6, 7, 8 и т.д. В момент каждого взаимодействия измерительной головйи с контуром вьтолняют регистрацию координат координатной системы измерительного робота, на основании которых опреде- ляют координаты точки контура. Погрешность измерения координат увеличивается при увеличении угла между ,направлением подхода измерительной головки к контуру и нормалью 9 к кон туру в данной точке. Для уменьшения этой погрешности после определения
координат каждой точки контура определяют на основании данных не менее чем двух последних измерений направление нормали к контуру, а затем выполняют отвод измерительной головки в направлении нормали или отвод изме- ;рительной головки и ее дополнительный подвод в направлении нормали. Во время этих вспомогат вльных движений уточняют координаты точки контура.
Формула изобретения
Способ контроля контура по авт.св. № 1254279, отличающийся тем, что, с целью повышения точности, в каждом цикле контроля на основании данных не менее чем двух последних измерений определя1от направление нормали к контуру, выполняют отвод измерительной головки в направлении нормали ипи отвод измерительной головки и ее дополнительный подвод .в направлении нормали, во время которых уточняют координаты точки контура.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля контура | 1984 |
|
SU1254279A1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| Способ управления роботом | 1988 |
|
SU1579771A1 |
| Способ следящего управления приводами измерительных роботов | 1980 |
|
SU1089390A1 |
| Способ получения виртуальных моделей сложнопрофильных криволинейных поверхностей | 2023 |
|
RU2813465C1 |
| Способ измерения формы поверхности детали | 1990 |
|
SU1753237A1 |
| Способ контроля профилей зубьев зубчатых колес | 1991 |
|
SU1772588A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2185953C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| Способ контроля точности контурных перемещений робота и устройство для его осуществления | 1987 |
|
SU1481060A1 |
Изобретение относится к измерительной технике, а именно к способам контроля контуров с помощью измерительных роботов. Целью изобретения является повышение точности контроля. Координаты точек 2, 3 и 4, 5 контура 1 определяют последовательно, подводя к контролируемому контуру измерительную головку по предварительно запрограммированным поисковым траекториям б, 7, 8 и т.д. В каждой из точек для уточнения координат определяют направление нормали 9 к контуру и выполняют последовательные отвод и подвод вдоль найденного направления нормали. Во время этих дополнительных движений уточняют координаты точки касания. 1 ил. с & Л С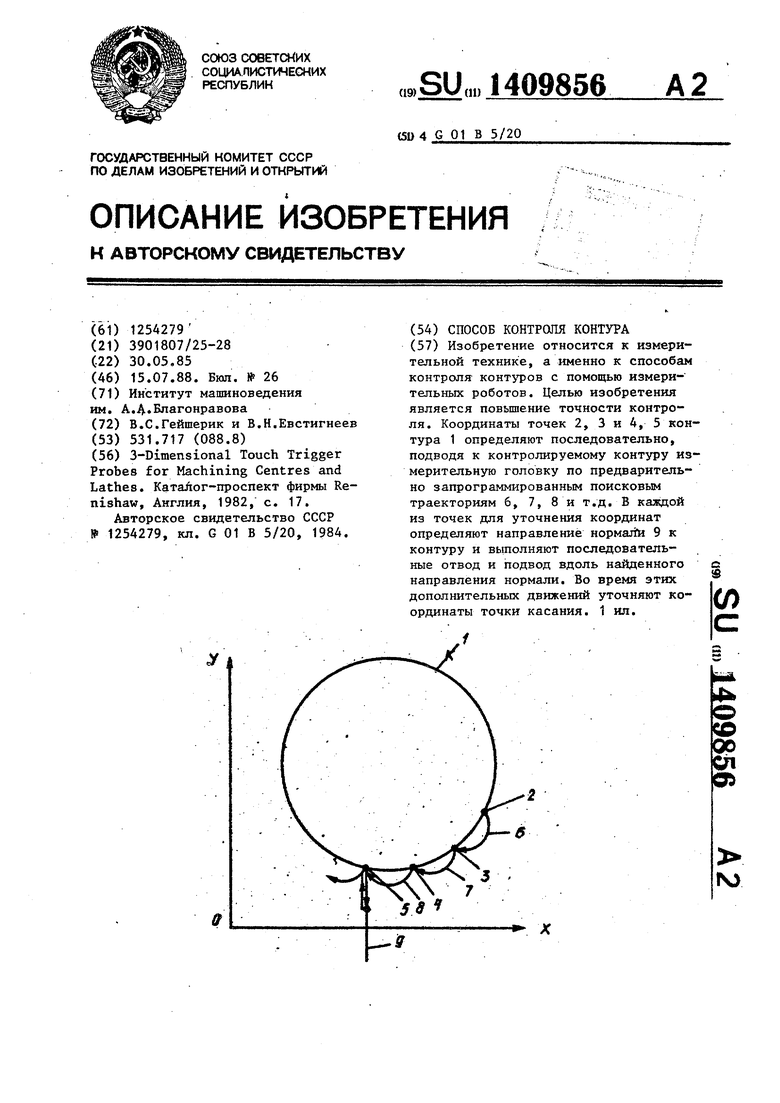
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| КатаЛог-проспект фирмы Re- nishaw, Англия, 1982, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Способ контроля контура | 1984 |
|
SU1254279A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
