tsD
00
Изобретение относится к обработке металлов давлением, в частности к механизмам подачи заготовок высадочного автомата.
Цель изобретения - повышение качества изделий путем улучшения их механических характеристик и расширение технологических возможностей автомата путем расширения номенклатуры обрабатываемых изделий за счет обеспечения возможности их изготовления из штучных исходных заготовок.
На чертеже представлен механизм подачи заготовок.
Механизм состоит из полой направ- ляюш,ей 1 в виде трубы, которая крепится к станине 2 автомата и упирается передним торцом в отрезную матрицу 3. В направлякэщей 1 концентрично ей расположен толкатель 4, подпружиненный относительно направляюшей 1. Противоположный рабочему конец толкателя выполнен в виде зубчатой рейки 5, которая взаимодействует с шестерней 6, установленной на приводном валу 7, кинематически связанном с приводом (не показан) автомата посредством управляемой соединительной муфты 8. По другую сторону толкателя 4 противоположно шестерне 6 установлен опорный элемент толкателя, выполненный в виде ролика 9 с профилированной рабочей поверхностью, установленного с возможностью свободного вращения на оси 10, жестко установленной на станине 2 автомата.
В направляющей 1 имеется окно, через которое обрабатываемые штучные исходные заготовки питателя 11 подаются в ее полость. На станине автомата закреплен упор 12, который позволяет регулировать ис ходное положение толкателя 4. В nanpaii- ляющей 1 вблизи зоны окна со (-мешл - нием в сторону отрезной матриць; cMCii тирован прижим 13 исходной нггучной .чаг;: товки 14, действуюп 1ий на боковую се не, верхность перпендикулярно оси подачи. Второй аналогичный прижпм устаиоплеп у выходного торца отрезной матрии, 3.
Механизм работает следуюми м опразом.
При наладке автомата р.-м улируют поло жение толкателя 5 при помощи 12. Регулируют, кроме того, i ,e.i. рабочогг; хода толкателя (ход толкателя |)авеи высоте заготовки), который регулируется так же, как и величина подачи исходной заготовки R БИде проволоки для высадочных автоматов. Предварите.пьно г направляющую 1 и матрицу 3 помеп1аю1 заготовки так, чтобы пространство между выходным торцом матрицы и голкателем было заполнено. В исхо,чном положепии муфта X включена.
Б момент подачи приводной вал 7 начинает вращаться, передавая вращение приводной шестерне 6, которая перемещает
толкатель 5 на величину подачи. Толкатель 5 воздействует на заготовки 14, которые перемещают одна другую на заданную величину (на величину хода толкателя). При этом передняя заготовка заталкивается в полость отрезного ножа узла переноса заготовки на позицию деформирования.
После окончания подачи приводной вал останавливается, так как муфта 8 отключается, и толкатель 5 под действием пружины возвращается в исходное положение до соприкосновения с упором 12. Во время обратного хода толкателя шестерня 6 и ролик 9 проворачиваются вхолостую
на своих валах.
После возврата толкателя 5 в исходное положение муфта 8 включается, а очередная заготовка 14 из питателя 11 под действием веса опускается в направляющую 1. Выпадение передней заготовки из
матрицы 3 и опрокидывание последней заготовки в направляющей исключено, таг: как они зажаты подпужиненными прижимами 13.
25
Формула изобретения
1.Механизм подачи заготовок высадочного автомата, включающий смонтированные на станине приводные и кине0 матически связанные один с другим и с приводом авто.мата узел подачи исходных заготовок в отре.зную матрицу и узел переноса штучной заготовки на позиции деформирования, отличающийся тем, что, с целые повышения качее-п;а изделий путем
5 улучшения их механичеслих характеристик к расширения техполо1Д1- ;( ских воз.можностей :уте.1 расширения по.меик.1атуры обрабаты- ijcMi)ix из.чр. шй за сче 1 обеспечения воз- M ),ivi;oi:r-. их изготовления из штучных . .i;-ii.i: )тонок, узел подачи исходных
--uii птгциж выпо. шеп в виде установленной (jorno от1)езной матрице с упором в ее торец ;|Г);1ой направляющей с выполненным в ее степке окном для загрузки исходных :iaro i-OBOK и размещенного копцентркчно
5 ей с возможностью возвратно-поступательного от привода осевого перемещения, под- пружипеппого относ и тел;; и о направляю1цей толкателя, упора для регулировки исходного положения толкателя, установленного па станине соосно толкателю со стороны
0 нерабочего его торца, при этом часть боковой поверхности толкателя выполнена в ви.ае зубчатой рейки, а привод его осевого перемещения выполнен в виде уста- иовленпой па приводном валу шестерни с возможностью пег иодич ского одностороннего
5 вместе с ва.юм и холосто1 о в обратном на11рав.дении вращения,
2.Механизм ло п. 1, о ,.ийся тем. что он снабжен опорным элементом
3 14128704
толкателя, выполненным в виде ролика4. Механизм по п. 1, отличающийся
с профилированной наружной поверхностью,тем, что, с целью повышения надежности,
установленного на оси с возможностьюон снабжен расположенными перпендикулярсвободного вращения напротив шестерни,но оси подачи прижимами исходных загосвязанной с приводным валом посредством5 товок, один смонтированный вблизи зоны
управляемой соединительной муфты.окна направляющей со смещением в сторо3. Механизм по п. 2, отличающийсяну отрезной матрицы, - к направляютем, что соединительная муфта выполненащей, а другой, установленный на выходэлектромагнитной.ном ее торце, - к отрезной матрице.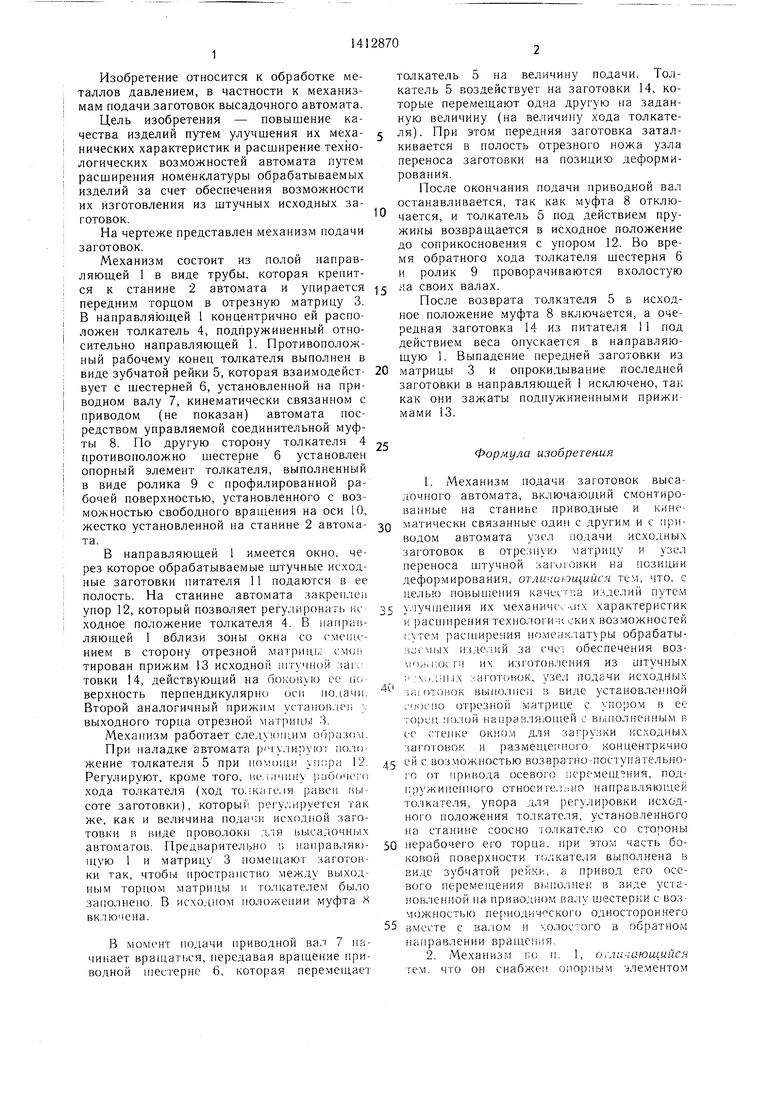
| название | год | авторы | номер документа |
|---|---|---|---|
| Холодновысадочный автомат | 1984 |
|
SU1281330A1 |
| Холодновысадочный автомат для изготовления полупустотелых заклепок | 1989 |
|
SU1632599A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Автомат для двухсторонней высадки деталей стержневого типа | 1980 |
|
SU935193A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Автомат для горячей высадки изделийСТЕРжНЕВОгО ТипА | 1979 |
|
SU814543A1 |
| Холодновысадочный автомат | 1984 |
|
SU1199404A1 |
| Холодновысадочный автомат | 1978 |
|
SU710740A1 |
| Автомат для двусторонней высадки | 1979 |
|
SU1107945A1 |
| МНОГОПОЗИЦИОННЫЙ ХОЛОДНО-ВЫСАДОЧНЫЙ АВТОМАТ | 1973 |
|
SU378278A1 |
Изобретение относится к обработке металлов давлением. Цель изобретения - повышение качества изделий путем улучшения их механических характеристик и расширение технологических возможностей автомата путем расширения номенклатуры обрабатываемых изделий за счет обеспечения возможности их изготовления из штучных исходных заготовок. Механизм подачи высадочного автомата работает со штуч- ны.ми исходными заготовками, загружаемыми в полую направляюш,ую, установленную соосно с отрезной матрицей автомата. С помощью подпружиненного толкателя штучные заготовки поочередно подаются 8 узел переноса заготовки на позицию деформирования. Привод толкателя кинематически связан с приводом автомата посредством шестеренно-реечной передачи через управляемую муфту сцепления. 3 з.п. ф-лы, 1 ил. S9

| Холодновысадочный автомат | 1978 |
|
SU710740A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
