9
с
;1
I Изобретение относится к пронзвод- Iству пишущих приборов 5 в частности к ;сборочным автоматам.
I Цель изобретения - повышение про- iизводительности.
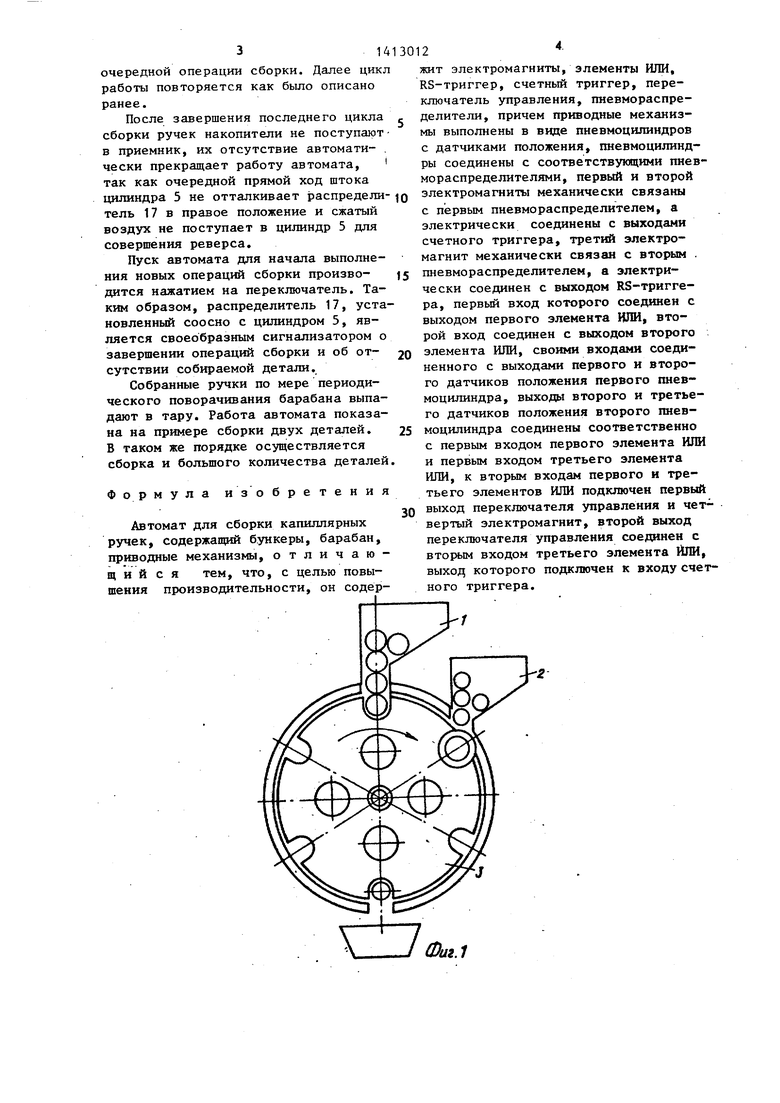
I На фиг.1 схематически изображен ;автомат; на фиг,2 - функциональная }схема автомата.
I Автомат для сборки капиллярных ру I чек содержит бункеры 1 и 2, барабан I 3, приводные механизмы 4 и 5, элек- i тромагниты 6-9, элементы ИЛИ 10-12, RS-триггер 13, счетный триггер 14, I переключатель 15 управления, пневмо- 1 распределители 16 и 17, датчики 18- 1 21 положения.
Автомат работает следующим образом.
Корпуса ручек загружают в бункер 1J а накопители жидкой краски (фитили) - в бункер 2. Поштучная подача корпусов и накопителей из бункеров в транспортирующий барабан 3 производится известными техническими средствами: отсекателем и вибро- механизмом, установленньм в бункере (не показаны). Привод этих средств - также осуществляется от пневмоцилинд ров.
При нажатии переключателя 15 Пуск подается сигнал на электромагнит 9, который посредством своего сердечника устанавливает распределитель 17 в исходное правое положение. При этом шток цилиндра 5 также возвращается в свое левое исходное положение, так как воздух поступает по трубопроводу. Сигнал от переключателя 19 также поступает на логический элемент ИЛИ 10, выход которого соединен с входом установки в О триггера 13. При этом триггер 13 устанавливается в О и электромагни 8 выключается, не препятствуя распределителю занять правое положение. Кроме того, сигнал от переключателя 19 через логический элемент ИЛИ 12 поступает на счетный вход триггера 14 и переключает его в одно из очередных положений. Если триггер 14 устанавливается в положение, при котором 1 находится на нижнем (по фиг.2) выходе, электромагнит 7 включается и переводит распределитель 20 в левое положение. Сжатый воздух от сети через распределитель 17 поступает по трубопроводу, и поршень цилиндра 4 начинает двигаться вверх.
130122
Шток цштиндра 4 поворачивает барабан 3 на 60 . При этом корпус ручки, поступивший из бункера 1 в паз барабана, .занимает положение напротив приемника барабана, куда из бункера 2 поступают накопители. В конце прямого хода штока цилиндра 4 датчик 18 вьодает сигнал, который через логичес- IQ КИЙ элемент ИЛИ 11 поступает на вход установки в 1 триггера 13. При наличии состояния 1 на выходе триггера 1 3 включается электромагнит 8 и переводит распределитель 17 в левое
и положение. Сжатый воздух по трубопроводу поступает в цилиндр 5, который посредством штока выталкивает накопитель из приемника барабана и вталкивает его в корпус ручки, находящейся
2Q в пазу барабана. Паз барабана сделан несколько длиннее корпуса ручки, поэтому при включении электромагнита 8 и установлении распределителя в левое положение корпус ручки прижимается к
25 левой стенке барабана с помощью сердечника электромагнита 9, взаимодействующего в данномположении с распределителем 17. По завершении хода штока цилиндра 5 срабатывает датчик
2Q 21, сигнал которого через логический элемент ИЛИ 10 устанавливает триггер 13 в состояние О, и электромагнит 8 выключается, не препятствуя возврату в правое положение распределителя 17, При этом накопитель полностью входит
35 в корпус и вместе с корпусом отталки- . вает сердечник электромагнита 9 от барабана. Сердечник, взаимодействуя с распределителем 17, возвращает последний в исходное правое положение. Это сигнализирует о завершении операции сборки и о возврате штока цилиндра 5 в левое исходное положение, так как сжатый воздух от распределителя 17 поступает в трубопровод. При
S с
возврате штока цилиндра 5 в левое
исходное положение датчик 20 выдает сигнал, который через логический элемент 12 ИЛИ поступает на счетный вход триггера 14 и переключает его. Те-
0 перь состояние будет на верхнем выходе, а О - на нижнем. Электромагнит 7 выключается, а электромагнит 6 включается и переводит распределитель 16 в правое положение. Сжатый
5 воздух поступает по трубопроводу, и шток цилиндра делает ход вниз, поворачивая барабан на 60 и фиксируя его в данной позиции для выполнения
40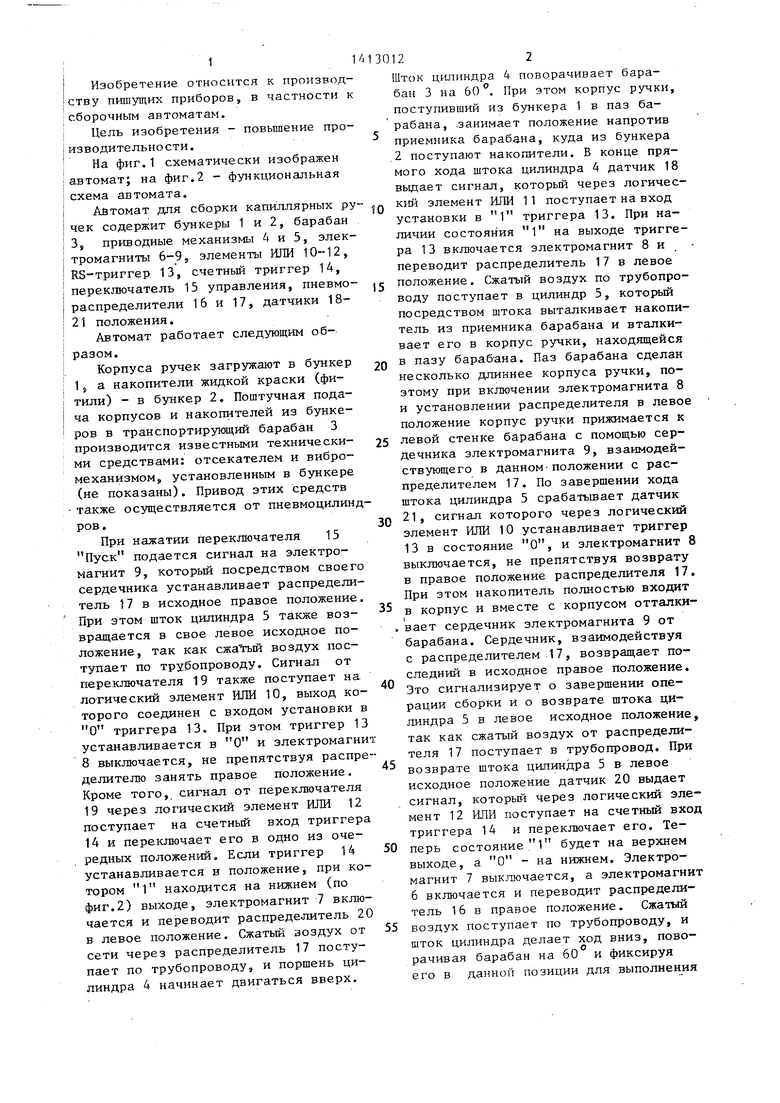
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки цилиндрических деталей | 1987 |
|
SU1444172A1 |
| Устройство для поштучной выдачи деталей | 1988 |
|
SU1567402A1 |
| Автомат для сборки сердечников магнитопроводов электрических машин | 1980 |
|
SU959220A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| Автомат для разделки кильки и укладки ее рядами в прямоугольные банки | 1959 |
|
SU127793A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОНИЧЕСКИХ СОПРЯГАЕМЫХ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2016704C1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Устройство для ввертывания сердечников в катушки | 1987 |
|
SU1642531A1 |
| Автомат для изготовления седлообразных катушек | 1977 |
|
SU736190A1 |
| Автомат для навивки пружин | 1980 |
|
SU1002072A1 |
Изобретение относится к технологическому оборудованию и используется для сборки ручек. Целью изобретения является повышенна производи.тельности. Цель достигается тем, что автомат содержит систему пневмо- цилиндров, обеспечивакщих транспортирование деталей и их сборку, при этом транспортирующий детали барабан приводится в действие приводом, выполненным в виде пневмоцилиндра.Штсж цилиндра поворачивает барабан на 60 . Работа цилиндра привода барабана и работа цилиндра сборки деталей ручки взаимосвязаны управляющими командами, формируемыми датчиками хода штока цилиндров, логическими элементами и триггерами. Особенностью является Toj что цилиндр сборки ручки и им управляющий распределитель сжатого воздуха установлены соосно и расположены с противоположных сторон цилиндра. Это обеспечивает контроль операции сборки ручки и автоматическую остановку после сборки последней ручки. 2 ил. (Л с
| Автомат для сборки шариковых авторучек | 1978 |
|
SU766901A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
