Изобретение относится к станкостроению, н частности к оборудованию для многооперациониой механической обработки деталей, например сверле- ния, зенконания и нарезки резьбы.
Цель изобретения - расширение технологических возможностей за счет обеспечения пoзt южяocтн обработки деталей на .юм секторе поворота.
На чертеже изображено устройство для обработки детали.
Устройство состоит из устанозлен- ных на станине 1 транспортного стола 2, поворотного вокруг оси 3, с рав- номерно расположен;п)1ми по окружности приспособлениями 4 для размещения обрабатываемых деталей, держателя S, устанорлснного в поооротном вокруг оси 6 корпусе 7 с возможностью воз- вратно-поступательного перемещения и направлении, перпендикулярном оси 6 3i счет располо7(енпя (iro на направляющих колонках 8, связанных между собой и с корпусом 7 посредством пру жины 9 и инструментальной головки 10, установленной в направляющей втулке 1 1 , расположенно на одном к.от;е рычага 12, второй конец которого шарнирно закреплен на оси 3 трансп -.ртрого стола 2, На держателе 5 жестко закреплены водило 13с П-об разным пазом 14., в котором размещена ннструмента.пьная головка 10, и полукольцевой упор 15, периодически вза- нмодействутощий с приспособлениями 4 для размеще тя обрабатъшаемых деталей. На оси 6 поворота корпуса 7 держателя 5 закреплен рычаг 16 с пружиной 17 и роликом 18, взаимодействую- щим на холостом ходу с кулачком 19 специального профиля, связаннь м посредством зубчатой передачи 20 и 21 с транспортным столом 2.
Инструментальная головка 10 посредством пружины 22 и ролика 23 связана с цилиндрическим секторным неподвижным копиром 24. На станине 1 устройства установлен регулируемый упор 25, предназначенш р для ограничения угла повороте водила 13. Копир 24 предназначен для сообщения возвратно-поступательного перемещения инструментальной головке 10 в процессе обработки детали.
Устройство работает- следующим об- раяом.
с
ю
15 0 5 0 5 0
5
0
5
Нри вращении транспортного стола 2 вокруг оси 3 приспособление 4 при помощи пружин 9 взаимодействует с дистанционным полукруглым упором 15 и поворачивает посредством П-образного паза 14 водила 13, связанного с по- воротт,1м держателем 5, инструментальную головку 10 на угол,необходимый для осуществления обработки детали. В процессе поворота инструментальная головка 10 посредством цилиндрического секторного неподвижного копира 24, ролика 23 и пружины 22 осуществляет возвратно-поступательное движение, выполняя обработку детали.
С окончанием взаимодействия дистанционного полукруглого упора 15 с приспособлением 4 транспортного стола 2 рабочий цикл заканчивается и осуществляется возврат механизма сопровождения в исходное положение в направлении, обратном вращению транспортного стола 2. При этом ролик 18 при помощи пружины 17 начинает взаимодействовать с кулачком 19 специального профиля, которому сообщается вращательное движение посредством зубчатой передачи 20 и 21, и он поворачивает рычагом 16 ось 6, несущую корпус 7, упор 15 и держатель 5 с водилом 13, а те, в свою очередь, поворачивают инструментальную головку 10. Профиль кулачка 19 выполнен по синусоиде,что обеспечивает управление скоростью движения инструментальной головки 10 (возврат в исходное положение и остановку) в безударном режиме на холостом ходу.
Регулируемый упор 25 служит для ограничения угла поворота водила 13 на холостом ходу.
Формула изобретения
Устройство для обработки детали, содержащее инструментальную головку, подвижную в осевом направлении от копира, и смонтированные на станине вращающийся на оси транспортный стол с равномерно расположенными по окружности приспособлениями для размещения обрабатьшаемых деталей и держатель, установленный с возможностью поворота вокруг оси и возвратно-поступательного перемещения в направлении, перпендикулярном этой оси, отличающееся тем.
14U571
что, с целью расширения технологи-струментальная головка, при этом ко- ческих возможностей, устройство снаб-пир инструментальной головки жестко жено механизмом сопровояадения, вы-закреплен на станине,а инструменталь- полненным в виде водила с П-образнымная головка расположена в пазу водй- пазом и полукруглого упора, установ-ла, причем, упор держателя установленных на держателе, и рычагом, одинлен с возможностью взаимодействия с конец которого шарнирно закреплен наприспособлениями для размещения об- оси стола, а на другом размещена ий-рабатьшаемых деталей.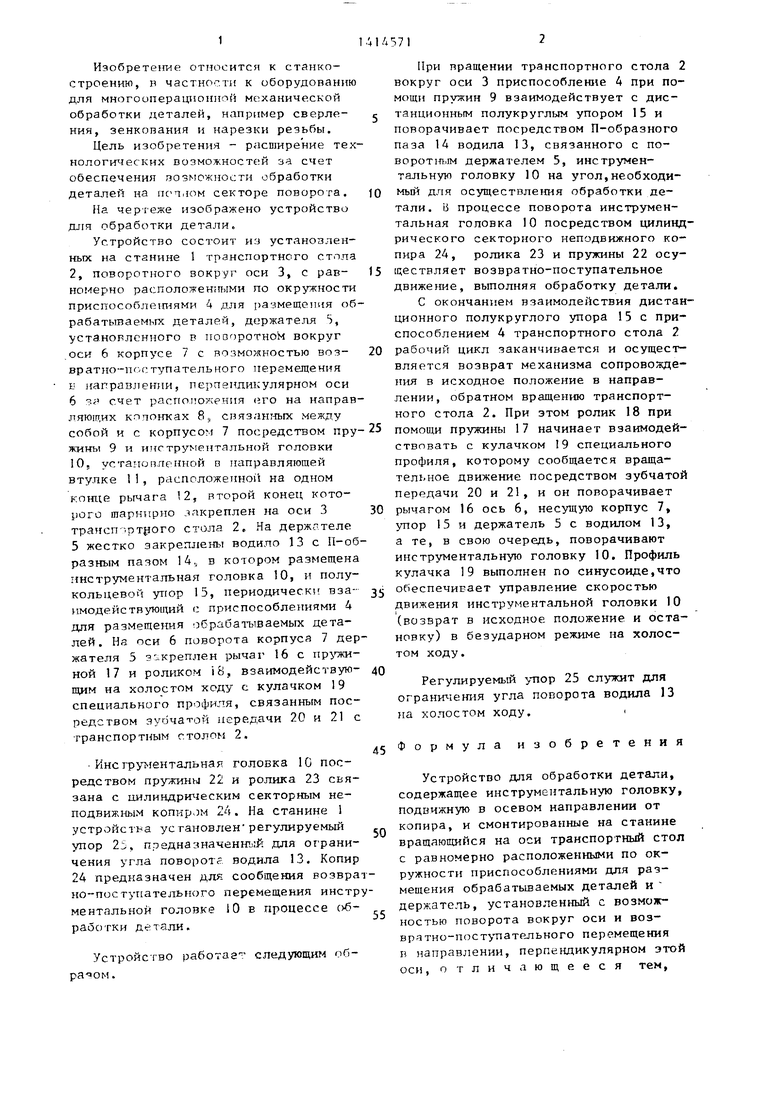
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для обработки и сборки деталей | 1977 |
|
SU694346A1 |
| Станок для механической обработки | 1987 |
|
SU1512707A1 |
| Автомат для обработки и сборки деталей | 1978 |
|
SU724314A1 |
| Загрузочное устройство | 1978 |
|
SU749626A1 |
| Загрузочное устройство | 1978 |
|
SU860994A1 |
| Станок для механической обработки | 1978 |
|
SU841784A1 |
| МНОГОПОЗИЦИОННЫЙ СТАНОКI ВСЕСОЮЗНАЯ \ | 1973 |
|
SU381499A1 |
| Роторный автомат | 1990 |
|
SU1717317A1 |
| Многопозиционный пресс-автомат | 1979 |
|
SU818910A1 |
| Устройство для обработки деталей типа тел вращения | 1975 |
|
SU552150A1 |
Изобретение относится к области станкостроения, в частности к оборудованию для многооперационной механической обработки. Целью изобрете гия является расширение технологических возможностей за счет увеличения времени сопровождения инструментом детали. При вращении стока 2 приспособЮ 2t 12 ление 4 взаимоде1 ствует с упором 15 и поворачивает держатель 5 с водилом 13, а через него - инструментальн то головху 10 на некоторый угол, необхо- димьй для обработки детали. В это время головка 0 посредством ко-- пира 24 совершает возвратно-поступательное перемещение. По окончанию об- работки под действием рычага 16, вэа- имодейств пощего с кулачком 19, кинематически связанным с приводом устройства поворачивается держатель 5 в исходное положение, увлекая за собой посредством паза 14 водила 13 инструментальную головку 10, где упор 15 встречает очередное приспособление 4. 1 ил. ../ с S (Л 4: СП 
| Автомат для обработки и сборки деталей | 1978 |
|
SU724314A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
