13
15
J
Изобретение относится к машиностроению и может быть использовано в качестве захватного органа промьшшен- йых роботов и манипуляторов.
Цель изобретения - расширение технологических возможностей и повышение производительности путем автоматической смены опорного и зажимного
Элементов в зависимости от материала
изделия,
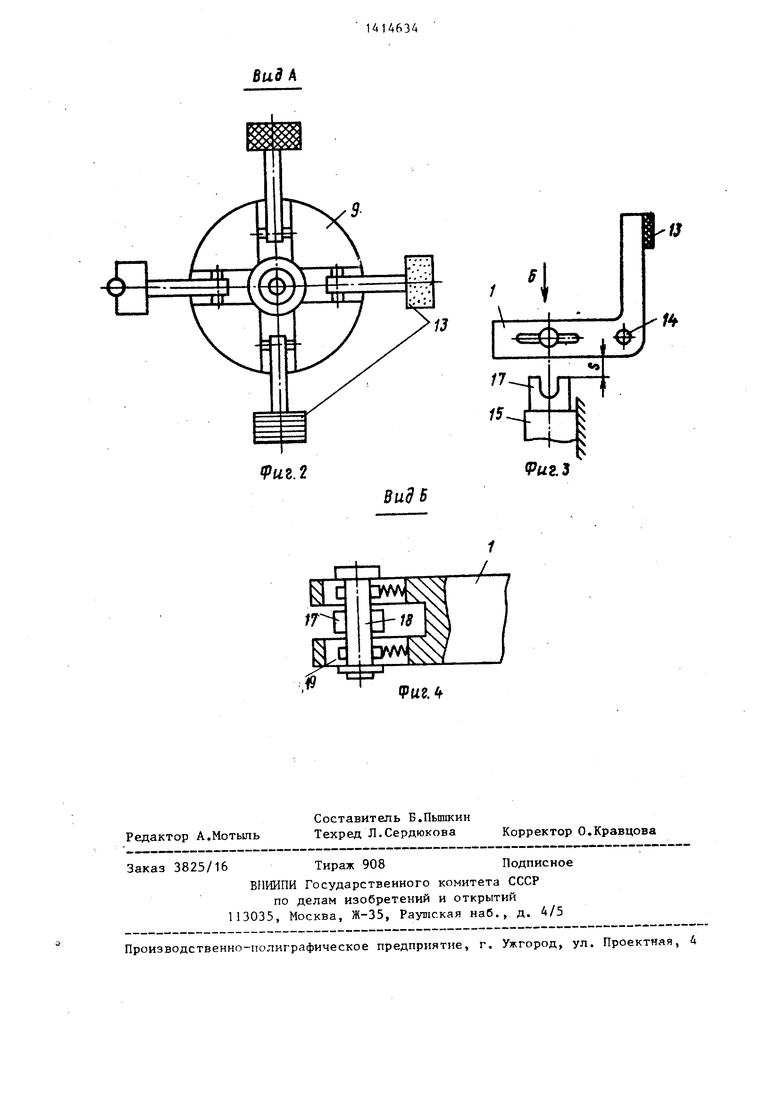
На фиг. 1 представлен захват, об- Й1ий вид на фиг. 2 - вид А на фиг. 1
головки с пальцами)} на фиг. 3 - 1 ычаг{ на фиг. 4 - вид Б на фиг. 3.
I Захват содержит пальцы, выполненные в виде поворотных двуплечих ры- агов 1, и ладонь из двух полупризм
и 3j установленных по направляющим Элементам 4 основания 5.
Полупризмы 2 и 3 связаны с приво- ;JIOM 6, а их перемещение в плоскости, г ерпевдикулярной к оси руки, осуще- (±твляется винтом 7, именяцим разнона- г равленную резьбу для каждой полу- г|ризмы. Каждая полупризма 2 и 3 Снабжена барабаном 8 и головкой 9, Остановленными соответственно вдоль 1|аклонной поверхности полупризмы и йа площадке, параллельной ее задне- му основанию 5. Оси барабана 8 и го- Ловки 9 взаимно перпендикулярны, а ifx поворот обеспечивается индивиду- 4льным приводом 10, По окружности ёарабана 8 смонтированы опорные эле- йенты 11 из различных материалов и разных, конструкций, например надув- йые резиновые подушки, металлические или пластмассовые пластинки, пластинки с телами качения и т.п.
Двуплечие рычаги 1 установлены радиально в пазах головки 9, а их концы, обращенные к изделию 12, снабжены зажимными элементами 13. Каждьй рычаг 1 имеет возможность поворачи- иаться вокруг оси 14 и взаимодейст- вовать с приводом 15 через шток 17 и палец 18, имеющий возможность перемещения в отверстии 19, причем с последним взаимодействует только тот рычаг 15 который в данный момент предназначен для зажима детали. В исходном положении рычаги 1 отведены от изделия 12 посредством пружины 16 Захват работает следующим образом Рука манипулятора подает захват к изделию 12. Включают приводы 15,
0
0
5 п 5
под действием которых рычаги 1 поворачиваются вокруг осей 14 и своими зажимными элементами 13 прижимают изделие 12 к элементам 11. После создания необходимого усилия зажима рука переносит изделие 12 на рабочую позицию. Для освобождения изделия 12 из захвата выключаются приводы 15, после чего пружины 16 возвращают рычаги 1 в исходное положение.
При необходимости переноса другого изделия 12, выполненного из более хрупкого материала и большего диаметра, подается команда к приводу 6 винта 7 и приводам 10 барабанов 8 и головок 9. При повороте винта 7 полупризмы 2 и 3 перемещаются по его резьбовым участкам и занимают положение, соответствующее диаметру изделия 12, после чего привод 6 выключается.
В то же время барабан 8 и головка 9 поворачиваются до тех пор, пока опорные и зажимные элементы будут удовлевторять условиям работы соответственно материала изделия 12, пос ле чего приводы 10 выключаются. Далее захват работает как и в первом случае.
Формула изобретения
Захват манипулятора, содержащий ладонь из двух полупризм и пальцы, связанные с приводом их перемещения, и несущие зажимные элементы, отличающийся тем, что, с целью расширения технологических возможностей и повышения производительности, каждая полупризма содержит барабан с радиально установленными на нем опорными элементами и головку с радиальными пазами, имеющими возможность поворота, причем ось поворота барабана расположена вдоль наклонной поверхности призмы, а поворотная ось головки - перпендикулярно ей, пальцы выполнены в виде - поворотных рычагов, установленных в радиальных пазах головки, а зажимные элементы закреплены на их концах, обращенных в сторону установки изделия, при этом привод перемещения пальцев связан поочередно с одним из рычагов.
Budf(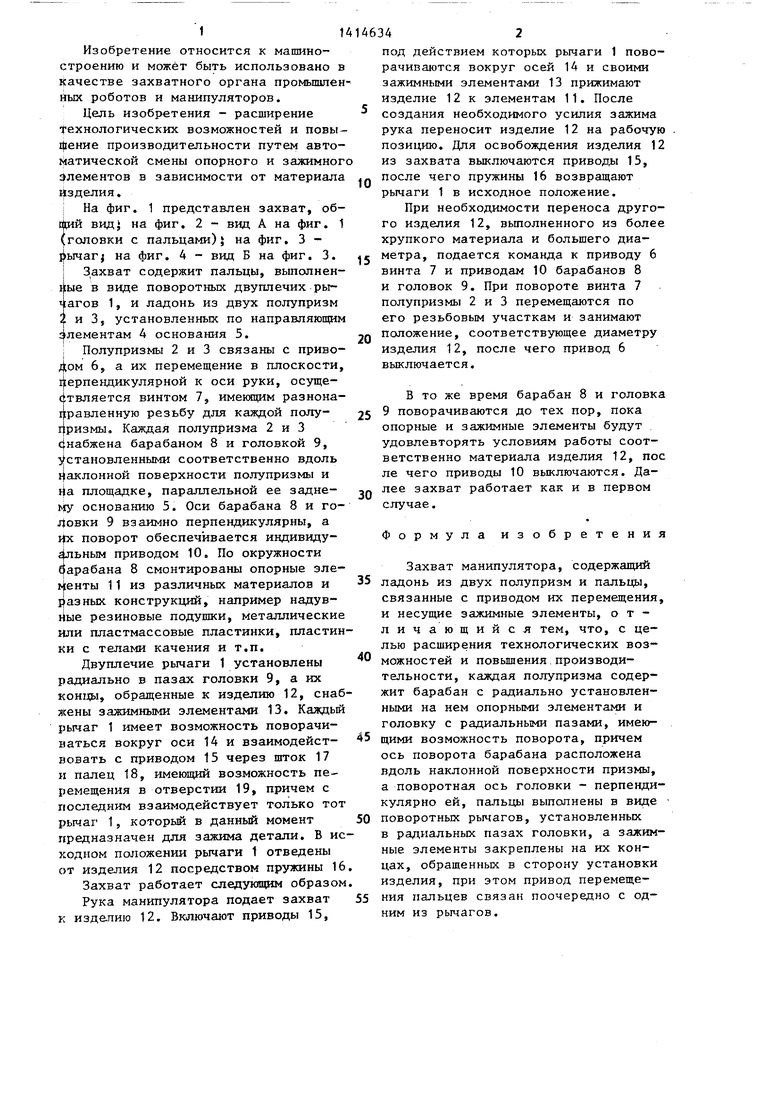
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1537510A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват манипулятора | 1985 |
|
SU1328192A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА БЕСКАМЕРНОЙ ШИНЫ НА ОБОДЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2428321C2 |
| Кисть манипулятора | 1987 |
|
SU1423372A1 |
| Промежуточный носитель инструмента | 1974 |
|
SU537785A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Устройство для перемещения и подачи животного на обработку | 1988 |
|
SU1648303A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
Изобретение относится к машиностроению и может быть использовано в качестве захватного органа промышленного робота и манипуляторов. Цель изобретения - расширение технологических возможностей и повьш1ение производительности путем автоматической смены опорных и зажимных элементов в зависимости от материала изделия. Захват состоит из рычагов 1 и полупризм 2 и 3, перемещакщихся винтом 7. Каждая полупризма 2 и 3 снабжена поворотным барабаном 8 и головкой 9. По окружности барабана 8 смонтированы опорные элементы 11, В головке 9 радиально установлены рычаги 1 с зажимными элементами 13. Привод 15 взаимодействует только с рычагом 15 расположенным на максимальном расстоянии от основания 5. При работе захвата изделие 12 прижимается зажимными элементами 13 к опорным элементам 11. Смена зажимных и опорных элементов производится поворотом барабанов 8 и головок 9. 4 ил. (Л
Риг. 2
1)
te
П
17 15
-RJ
игЗ
Вид Б
Фиг
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Захват манипулятора | 1982 |
|
SU1066800A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
