1
И зоОретеиие отиос ится к машиностроению, а именно к промышленным ро- Гн)там, манипуляторам и автооператорам, предназначенным для механизации и автоматизации основных и вспомогательных 1 пераций,
Цель изобретения - улучшение динамических характеристик.
На фиг, 1 изображено захватное устройство, общий вид; на фиг, 2 - разрез А-А на фиг. 1.
Захватное устройство содержит установленный на основании 1 силовой ци;п1ндр 2, содержащий прямоугольный в сечении корпус 3, в котором установлены с возможностью перемещения подвижные уплотнительные пластины 4 подпружиненные относительно корпуса 3 пружинами 5 сжатия. Силовой цилин 2 имеет поршень 6 прямоугольного сечения, имеющий в осевом сечении профиль, соответствующий закону перемещения захватных губок 7, Поршень 6 связан через шток 8 с двухсторонней .зубчатой рейкой 9, которая входит в зацепление с зубчатыми секторами 10 зажимных губок 7,
Устройство работает следующим образом,
В исходном положении поршень 6 силового цилиндра 2 находится в кранем левом положении (фиг, 1), При этом зажимные губки 7 разведены в стороны, В этом положении подвижные уплотнительные пластины 4 максимально сведены, сечение поршня 6 минимально. При подаче рабочей среды по .давлением в полость 11 силового цилиндра 2 поршень 6 двигается вправо (фи1-. 1), При этом подвижные уплот
нительные пластины 4 раздвигаются, увеличивается рабочая площадь сечения поршня 6, При условии постоянного расхода рабочей среды скорость движения поршня уменьшается. Усилие поршня 6 передается через шток 8 зубчатой рейке 9, которая связана с зубчатыми секторами 10 зажимных губок 7, Таким образом, скорость вращения зажимных губок 7 уменьшается, и захват детали 12 сопровождается минимальными динамическими нагрузками.
Для освобождения детали рабочая среда под давлением подается в полость 13 силового цилиндра 2, поршень 6 движется влево (фиг, 1), и деталь освобождается от захвата.
Формула изобретения
Захватное устройство, содержащее корпус, на котором установлены зажимные губки, жестко связанные с зубчатыми секторами, находящимися в зацеплении с зубчатой рейкой, закрепленной на штоке силового цилиндра, отличающе еся тем, что, с целью улучшения динамических характеристик, силовой цилиндр выполнен прямоугольной формы в сечении, перпендикулярном оси силового цилиндра, причем поршень выполнен переменного сечения в плоскости, параллельной одной из стенок корпуса, а в других его стенках установлены подпружиненные дополнительно введенные уплотнительные пластины, предназначенные для взаимодействия с поршнем.
Редактор И.Горная
Составитель А. Алексее
Техред М.Ходанич Корректор Л. Пилипенко
Заказ 4586/15Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Пр|;1ектная, 4
Фиг 2.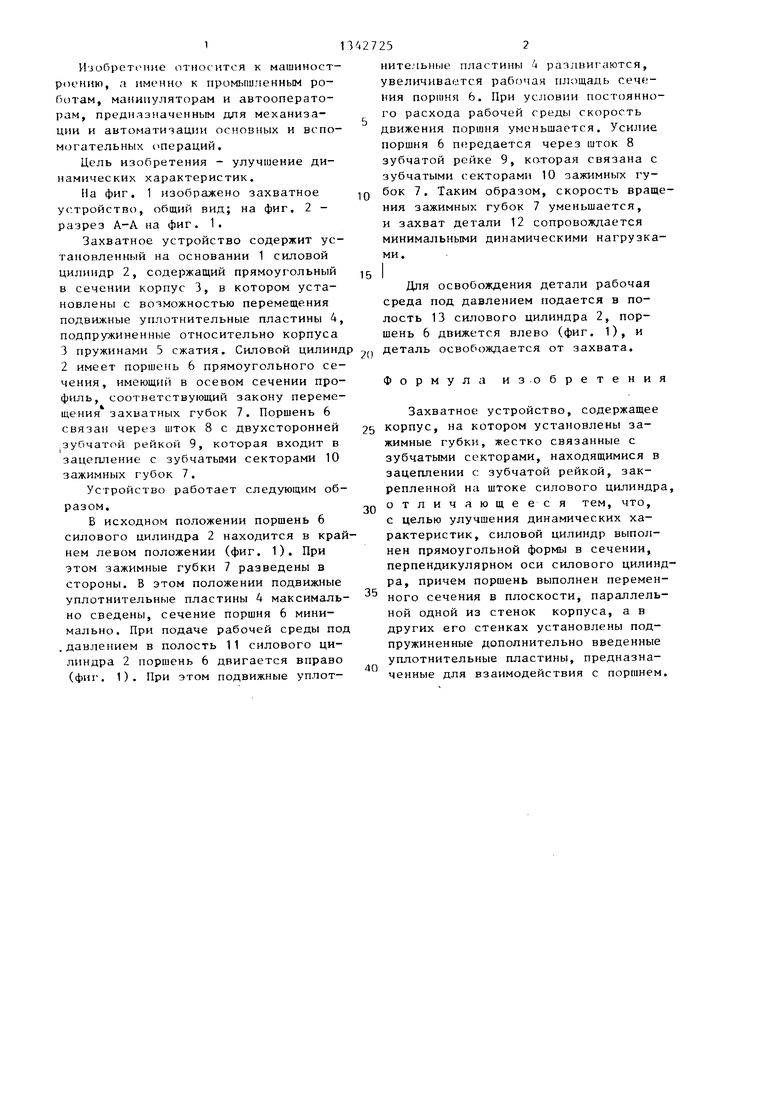
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1414635A1 |
| Захватное устройство | 1986 |
|
SU1315301A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Захватное устройство | 1987 |
|
SU1414636A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1987 |
|
SU1437218A2 |
| Схват промышленного робота | 1988 |
|
SU1583287A2 |

Изобретение относится к области машиностроения, а именно к промышленным роботам, манипуляторам и автооператорам, предназначенным для механизации и автоматизации основных и вспомогательных операций. Целью изобретения является улучшение динамических характеристик. В исходном положении поршень 6 силового цилиндра, имеющего прямоугольное сечение, находится в крайнем левом положении. При этом зажимные губки 7 разведены. Поршень 6 в осевом сечении имеет переменное сечение, и уплотнительные пластины 4 максимально сведены. В этом положении сечение поршня 6 минимально. При подаче рабочей среды под давлением в полость 11 поршень 6 перемещается вправо, при этом уплотнительные пластины раздвигаются, увеличивается рабочая площадь сечения поршня, скорость перемещения поршня снижается. Таким образом, при зажиме детали 12 губками 7 скорость перемещения последних минимальная,а усилие зажима максимальное. 2 ил. / 7 (О 13 ||И ь и ю ю СП Фиг f
| Схват манипулятора | 1977 |
|
SU632564A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
