(54) ЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Захват | 1977 |
|
SU663577A1 |
| Захват | 1977 |
|
SU667396A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Захватное устройство промышленного робота | 1987 |
|
SU1419878A1 |
| Захватное устройство | 1984 |
|
SU1237422A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
1
Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации производственных процессов в машиностроении, и может быть использовано в конструкциях промышленных роботов, манипуляторов и механических рук
Известен захват манипулятора, обеспечивающий прямолинейное плоско-параллельное перемегцение губок, что дает возможность получить неизменным положение захватываемой детали при изменении ее размеров, например, после механической обработки 1. Данный захват содержит корпус, привод линейного перемешения и зажи.мные губки, каждая из которых связана с корпусом шарнирно-рычажным механизмом.
В известном захвате скорость перемешения губок и усилие их сжатия нелинейно зависят от величины раскрытия губок, что в ряде случаев снижает технологические возможности захвата.
Цель изобретения - расширение техно-, логических возможностей захвата.
Указанная цель достигается тем, что на исполнительном элеме.нте привода линейного перемещения, например на штоке силового цилиндра, закреплен клин, в корпусе образованы поперечныепазы, нгарнирно-рычажный механизм выполнен в виде нантографа, на конце одного из рычагов которого установлен ролик, взаимодействующий с клином, а каждая зажимная губка установлена шарнирно и подпружинена на конце другого pi чага, причем ось. ролика размен1ена в поперечном пазу, поджата пружиной и расположена на одной прямой с осями 1на)ниров губки и корпуса.
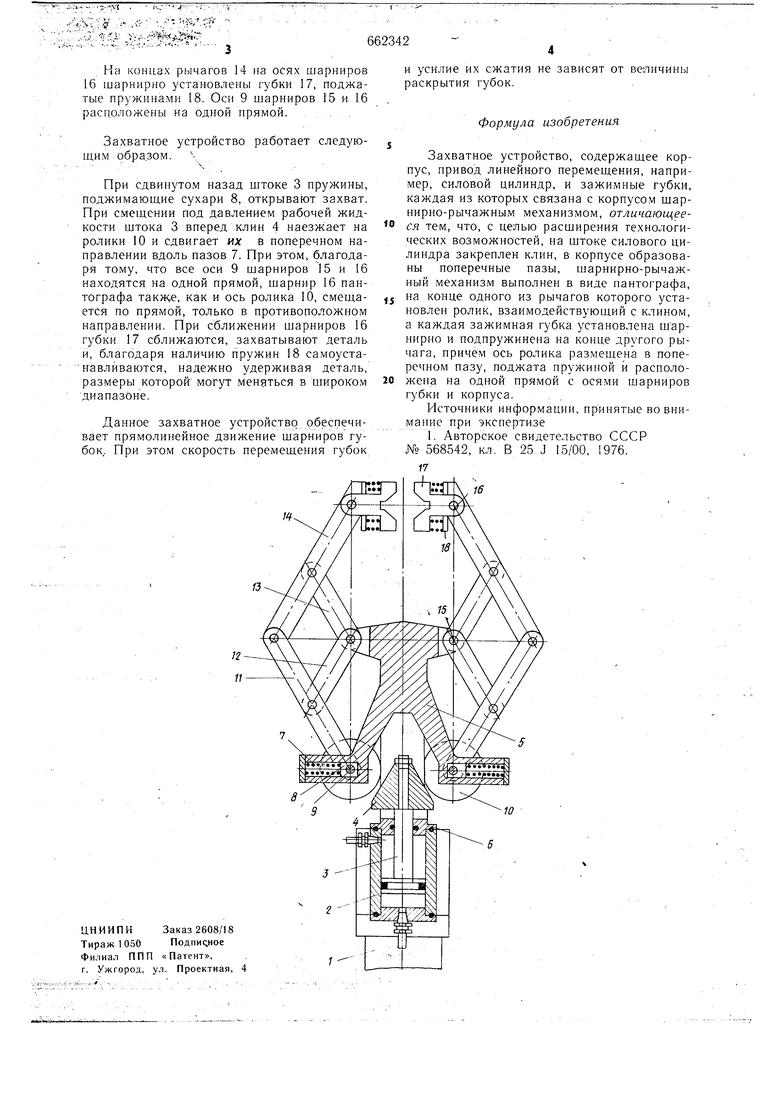
На чертеже показано захватное устройство.
На конце руки 1 манипулятора установлен СИЛОВОЙ цилиндр, например гидроцилиндр 2 привода захвата. На внешней части штока 3 установлен клин 4. В корнусе 5 захвата, закрепленного ненбдвижно на крьцнке 6 гидроцилиндра, образованы поперечные пазы 7, в которые вставлены поджимаемые пружинами сухари 8. Б сухари 8 вставлен) оси 9 роликов 10. Оси 9 зафиксированы на концах рычагов 11, входящих F. состав пантографа. Пантограф содержит также рычаги 12, 13 и 14, шар)ирно связанные между
собой. Рычаги 12 и 13 с ПО.
15 связаны с корпусом 5.
