Изобретение относится к автоматизации и механизации технологических процессов ,и может быть использовано в конструкциях промышленных роботов и манипуляторов.
Целью изобретения является повы- шение надежности работы и обеспечение захвата деталей, смещенных относительно оси устройства.
На фиг. представлено захватное устройство, общий вид; на фиг. 2 - вид А на фиг. 1.
Захватное устройство содержит корпус 1, привод 2 линейного перемещения со штоком 3, клин 4. На корпусе i установлены два шарнирио-рычаж- ных механизма 5 и 6, выполненшлх в виде пантографов. На концах рычагов 7 и 8 шарнирно-рычажных механизмов 5 и 6 установлены ролики 9 и 10, вращающиеся относительно осей 11 и 2. Оси II н 12 роликов 9 и 10 размещены в поперечнь х пазах корпуса I и подпружинены пружинами 13 и 14, Ролики 9 и 10 опираются на поверхность клина 4. На концах рычагов 15 и 16 шарнир но-рычажных механизмов 5 и 6 неподвижно установлены упоры 17 и 18 с шарнирами 19 и 20, на которых щарнирно закреплены две зажимные губки 21 и 22, подпружиненные относительно упоров 17 и 18 пружинами 23, 24 и 25,26 соответственно. На торце штока 3 привода 2 линейного перемещения неподвижно закреплен плоский толкатель 27, Клин 4 имеет Т-образный поперечный паз и подвижно установлен относительно плоского толкателя 27, размещенного в его Т-образном поперечном пазу (фиг, 2). Клин 4 подпружинен через профилированный упор
28относительно корпуса 1 пружиной
29сжатия.
УСТРОЙСТВО работает следующим образом.
Привод 2 линейного перемещения перемещает шток 3 с плоским толкателем 27, который толкая клин 4, заставляет его вступать во взаимодействие с роликами 9 и 10, что вызывает перемещение их осей II и 12 в поперечных пазах корпуса 1 в направлении от -оси симметрии I-I захватного устройства. Пружины 13 и
14 обеспечивают постоянный контакт роликов 9 и 10 клина 4, а пружина 29 сжатия через профилированный упор 28 - постоянный контакт клина 4 с.плоским толкателем 27. Шарнирно- рычажные механизмы 5 и 6 преобразуют перемещение осей 11 и 12 роликов 9 и 10 в плоско-параллельное движение упоров 17 и 18 с установленными на их шарнирах 19 и 20 зажимными губками 21 и 22 в направлении к оси симметрии 1-1 захватного устройства. Тем самым обеспечивается захват деталей, расположенных
между зажимными губками 21 я 22, При разжатии зажимных губок 21 и 22 пружина 29 сжатия исключает появление, люфта между плоским толкателем 27 и клином 4.
0 Возможное смещение детали вдоль оси симметрии I-I захватного устройства компенсируется поворотом зажимных губок 21 и 22 вокруг шарниров 19 и 20, демпфирование поворо та осуществляется пружинами 23, 24 и 25, 26 соответственно.
Если деталь смеп1ена в поперечном направлении относительно оси симметрии I-I захватного устройства, то в процессе захвата в контакт с деталью вступает только одна из зажимных губок 21 и 22. При дальнейшем сжатии усилие, возникающее при зтом контакте, передается через один из шарнирно-рычажных механизмов 5 и 6, на один из роликов 9 и 10. В результате возникает дополнитель- ное усилие, с которым один из роликов 9 и 10 действует на клин 4. Поскольку клин 4 может перемещаться по поверхности плоского толкателя 27, то под действием этого дополнитель-. ного усилия он начинает двигаться и в поперечном направлении относительно оси симметрии I-I захватного устройства, создавая тем са.мым дополнительное усилие на npoTi-геоположный ролик 9 или 10, что в результате ускоряет движение другой зажимной губки 21 или 22. Так, одна из зажимных губок 21 или 22, вошедшая н контакт с деталью, остается неподвижной, а другая продолжает плоско-параллельное движение до тех пор, пока не коснется поверхности детали.
0
5
0
5
0
Budt(
Редактор А. Лежнина
Составитель А. Котов Техред Г.Гербер
Заказ 3237/17Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открыт й 113035, Москва, Ж-35, Раушская наб,, Д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.1
Корректор Л. Пилипенко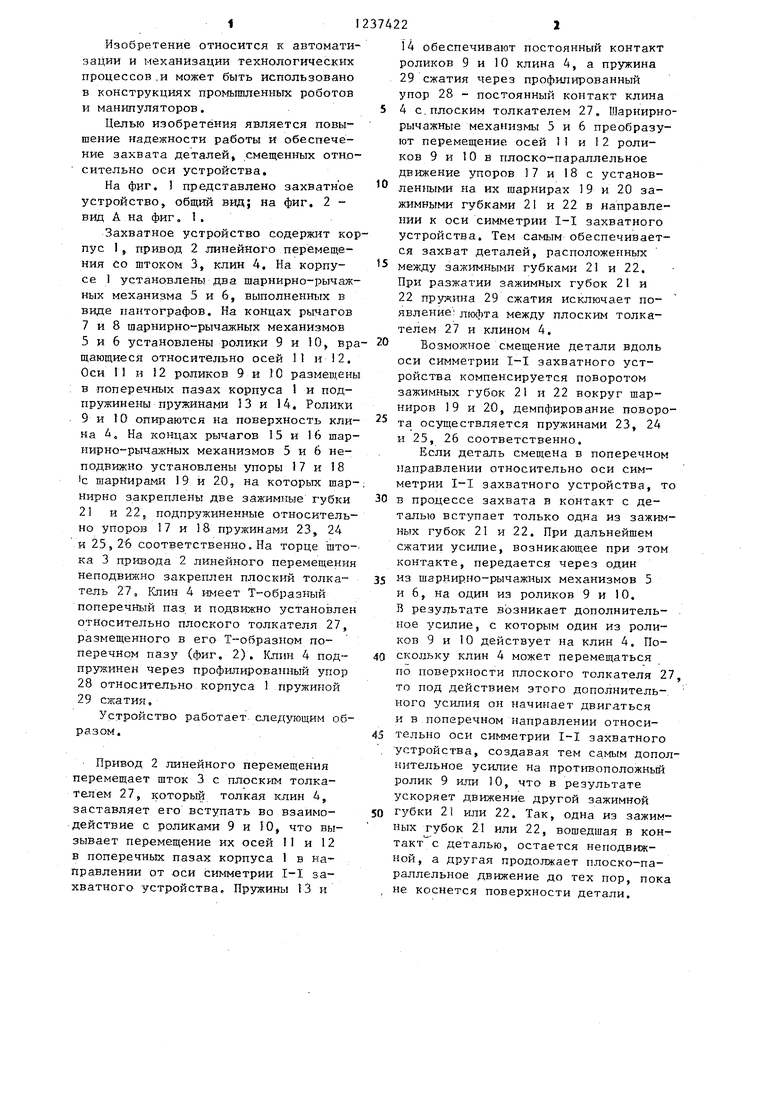
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство промышленного робота | 1987 |
|
SU1419878A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Захват | 1986 |
|
SU1397280A1 |
| Захват | 1977 |
|
SU667396A1 |
| Захватное устройство | 1987 |
|
SU1445954A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Устройство для определения прочности сцепления кирпича с раствором | 1980 |
|
SU951118A1 |
| Правильно-растяжная машина | 1975 |
|
SU566657A1 |
| Захватное устройство | 1986 |
|
SU1305032A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |

| Захватное устройство | 1977 |
|
SU662342A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
