4 ОО О ОС ГС ОС
1
Изобретение относится к промышленному транспорту, точнее к перегрузочным устройствам-штучных грузов, например поддонов, с одного конвейера на другой, расположенных преимущественно под прямым углом друг к другу.5
Целью изобретения является повышение надежности работы и упрощение конструкции.
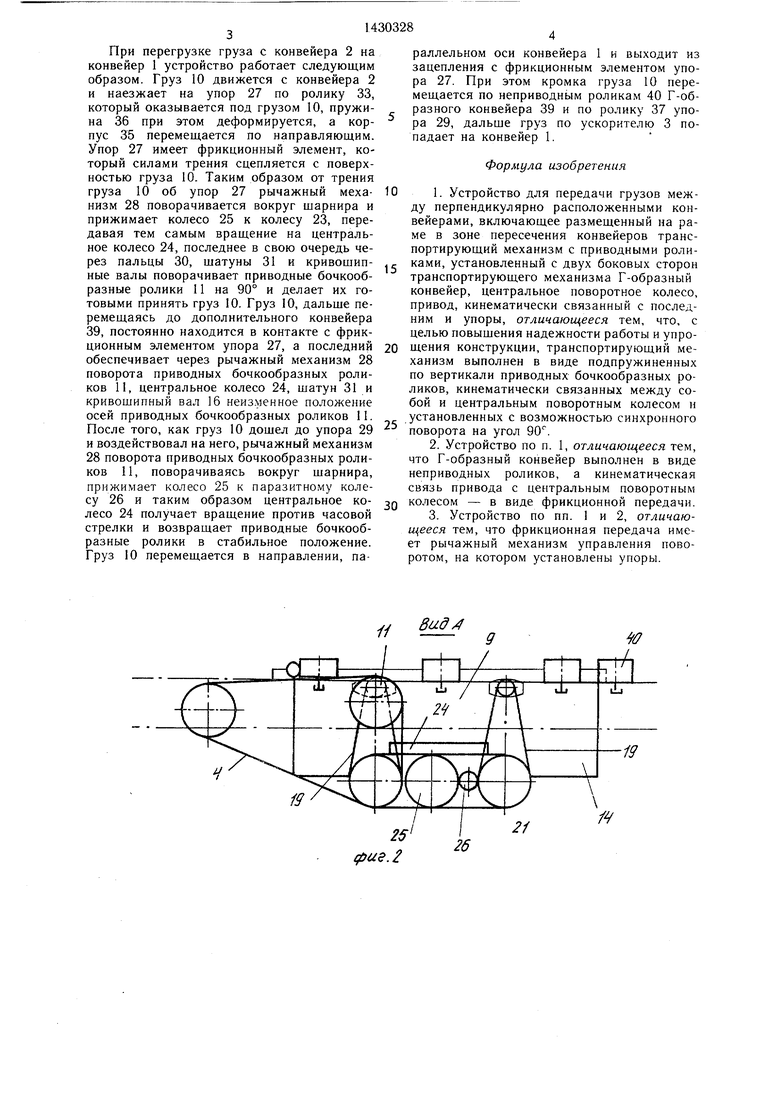
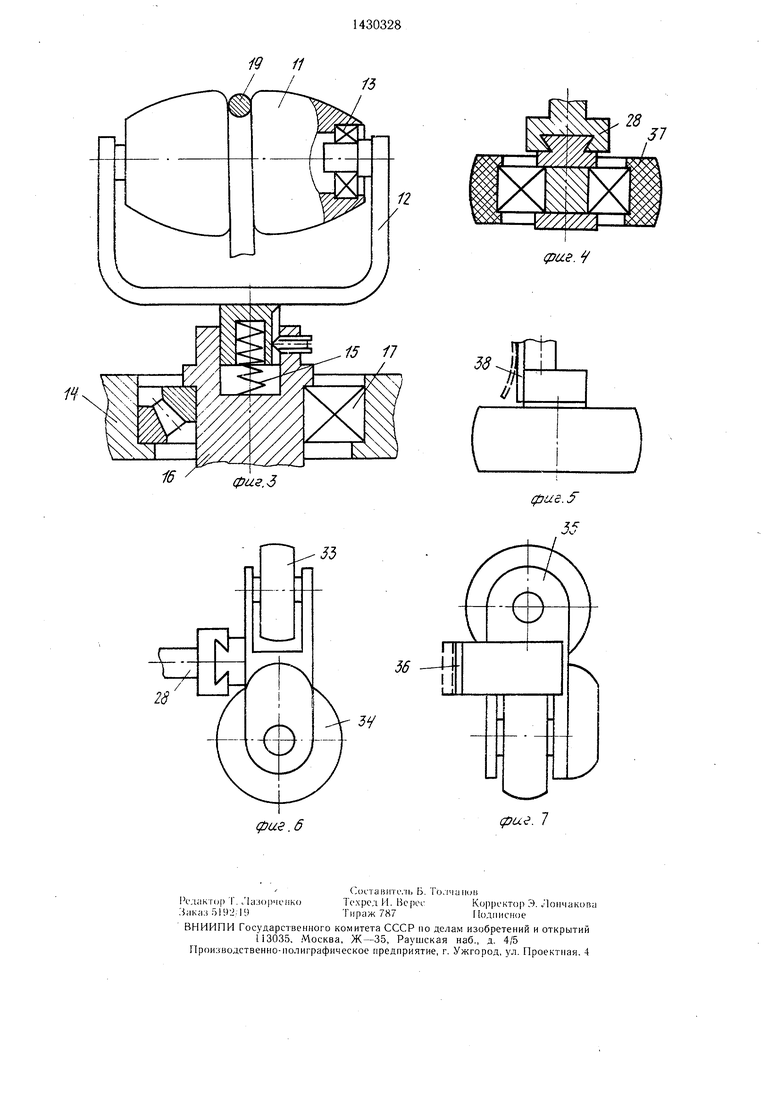
На фиг. 1 изображено устройство, вид в плане; на фиг. 2 - вид А на фиг. i; на ю фиг. 3 - приводной бочкообразный ролик; на фиг. 4-7 - упоры рычажного механизма поворота приводных бочкообразных роликов.
Устройство содержит перпендикулярно расположенные конвейеры 1 и 2, например 5 цепной и роликовый, ускоритель 3, состоящий из двух ремней 4 (конвейер) одного приводного шкива 5, промежуточного вала 6 с жестко закрепленными на нем шкивами 7 и общего неприводного шкива 8. Транс- ,. портирующий механизм 9, смонтированный в зоне передачи грузов 10 и имеющий приводные бочкообразные ролики 11, выставленные группами (наприимер по шесть, как показано на фиг. 1), при этом каждый росмонтированный на оси, имеющей возможность перемещения в направляющих рычажного механизма 28 поворота бочкообразных роликов 11 под действием груза 10 и опирающийся на пружину 38.
С возможностью двухстороннего охваты- вания транспортирующего механизма 9 смонтирован конвейер 39 Г-образной формы, один его участок параллелен цепному конвейеру 1, а другой - роликовому конвейеру 2.
Дополнительный конвейер выполнен из не приводных роликов 40, смонтированных на вертикальных осях с возможностью вращения. Рама 14 содержит опорные ролики 41.
Устройство работает следующим образом.
Груз (полка) 10 перемещается по конвейеру 1 и сначала попадает на ускоритель 3 и его ремнями 4 приподнимается над конвейером 1 и подается на транспортирующий механизм 9. Исходное положение приводных бочкообразных роликов соответствует этому режиму работы.
По роликам 11 груз 10 перемещается до дополнительного конвейера 39. При этом ролик 34 упора 27 перемещается вправо
лик смонтирован в вилке 12 в подшипни- 25 и тянет за собой рычажный механизм 28,
ках качения 13 (фиг. 3), вилка 12 соединена с рамой 14 с возможностью перемещения в осевом направлении под действием пружины 15 и с возможностью поворота на прямой угол кривошипным валом 16, устакоторьш перемещает колесо 25 j паразитному колесу 26, а последнее находится в зацеплении с колесом 23, которое получает вращение от приводного вала 20, который получает вращение от другого приводного
новленным в подшипнике 17. В целом транс- 30 вала 20, с которым соединен посредством
портирующий механизм 9 представляет собой приводной рольганг, ролики 11 которого соединены с приводными шкивами 18 посредством ременной передачи 19, а приводные валы 20 кинематически связаны между собой
ре.менной передачи 21. Колесо 25 поворачивает центральное колесо 24 по часовой стрелке. В пазах центрального колеса 24 закреплены пальцы 30, к которым прикреплены шатуны 31, при этом последние, переременной передачей 21 с тяговой цепью кон- 35 мещаясь под действием центрального колевейера 1 посредством приводной звездочки 22. При этом на каждом приводном валу 20 размещены колеса 23 фрикционной передачи, смонтированные с возможностью
са 24, поворачивают кривошипные валы 16, а вместе с ним и приводные бочкообразные ролики 11 на прямой угол. Поворот кривошипных валов 16 ограничивается упофрикционного зацепления с центральным Q ром 32. После поворота приводных бочкообколесом 24 через колесо 25 или колесо 25 и паразитное колесо 26. Колесо 25 смонтировано с постоянным зацеплением с центральным колесом 24. Колесо 25 соединено с упором 27 через рычажный механизм 28
разных роликов 11 груз 10 перемещается в направлении, перпендикулярном своему первоначальному движению. При этом упор 27 постоянно поджимается грузом 10, что обеспечивает нужное положение роликов 11.
управления поворотом бочкообразных роли- 45 Фрикционная передача, т.е. фрикционное коков 11 и упором 29 того же механизма. Центральное колесо 24 посредством пальцев 30 и шатунов 3 соединено с кривошипными валами 16 бочкообразных роликов 11 и содержит паз, имеющий воз.можлесо 25 и центральное колесо 24 выполняют роль предохранительной муфты. Колесо 25 имеет возможность проскальзывать по колесу 24 при перегрузках. Упор 27 не препятствует перемещению груза 10, так как
ность взаимодействия с упором 32 на раме 14. 50 кромка груза перемещается по ролику 34, Упор 27 содержит ролики 33 и 34, расположенные во взаимно перпендикулярных плоскостях и смонтированные на одном корпусе 35, имеющем возможность перемещения в направляющих рычажного механизма 28 поворота бочкообразных роликов 11 под действием груза 10 и опирающимся на пружину 36. Упор 29 содержит ролик 37,
55
когда груз 10 выходит из контакта с роликом 34 и попадает на конвейер 2, упор 27 возвращается в первоначальное положение, а вместе с ним приводные бочкообразные ролики 11 вновь устанавливаются в исходное положение под действием ременной передачи 19, которая из загружного положения возвращается в более стабильное.
смонтированный на оси, имеющей возможность перемещения в направляющих рычажного механизма 28 поворота бочкообразных роликов 11 под действием груза 10 и опирающийся на пружину 38.
С возможностью двухстороннего охваты- вания транспортирующего механизма 9 смонтирован конвейер 39 Г-образной формы, один его участок параллелен цепному конвейеру 1, а другой - роликовому конвейеру 2.
Дополнительный конвейер выполнен из не приводных роликов 40, смонтированных на вертикальных осях с возможностью вращения. Рама 14 содержит опорные ролики 41.
Устройство работает следующим образом.
Груз (полка) 10 перемещается по конвейеру 1 и сначала попадает на ускоритель 3 и его ремнями 4 приподнимается над конвейером 1 и подается на транспортирующий механизм 9. Исходное положение приводных бочкообразных роликов соответствует этому режиму работы.
По роликам 11 груз 10 перемещается до дополнительного конвейера 39. При этом ролик 34 упора 27 перемещается вправо
и тянет за собой рычажный механизм 28,
и тянет за собой рычажный механизм 28,
которьш перемещает колесо 25 j паразитному колесу 26, а последнее находится в зацеплении с колесом 23, которое получает вращение от приводного вала 20, который получает вращение от другого приводного
вала 20, с которым соединен посредством
вала 20, с которым соединен посредством
ре.менной передачи 21. Колесо 25 поворачивает центральное колесо 24 по часовой стрелке. В пазах центрального колеса 24 закреплены пальцы 30, к которым прикреплены шатуны 31, при этом последние, перемещаясь под действием центрального колемещаясь под действием центрального колеса 24, поворачивают кривошипные валы 16, а вместе с ним и приводные бочкообразные ролики 11 на прямой угол. Поворот кривошипных валов 16 ограничивается упором 32. После поворота приводных бочкообразных роликов 11 груз 10 перемещается в направлении, перпендикулярном своему первоначальному движению. При этом упор 27 постоянно поджимается грузом 10, что обеспечивает нужное положение роликов 11.
Фрикционная передача, т.е. фрикционное колесо 25 и центральное колесо 24 выполняют роль предохранительной муфты. Колесо 25 имеет возможность проскальзывать по колесу 24 при перегрузках. Упор 27 не препятствует перемещению груза 10, так как
кромка груза перемещается по ролику 34,
50 кромка груза перемещается по ролику 34,
55
когда груз 10 выходит из контакта с роликом 34 и попадает на конвейер 2, упор 27 возвращается в первоначальное положение, а вместе с ним приводные бочкообразные ролики 11 вновь устанавливаются в исходное положение под действием ременной передачи 19, которая из загружного положения возвращается в более стабильное.
При перегрузке груза с конвейера 2 на конвейер 1 устройство работает следующим образом. Груз 10 движется с конвейера 2 и наезжает на упор 27 по ролику 33, который оказывается под грузом 10, пружина 36 при этом деформируется, а корпус 35 перемещается по направляющим. Упор 27 имеет фрикционный элемент, который силами трения сцепляется с поверхностью груза 10. Таким образом от трения груза 10 об упор 27 рычажный механизм 28 поворачивается вокруг шарнира и прижимает колесо 25 к колесу 23, передавая тем самым вращение на центральное колесо 24, последнее в свою очередь через пальцы 30, шатуны 31 и кривошипные валы поворачивает приводные бочкообразные ролики 11 на 90° и делает их готовыми принять груз 10. Груз 10, дальше перемещаясь до дополнительного конвейера 39, постоянно находится в контакте с фрикционным элементом упора 27, а последний обеспечивает через рычажный механизм 28 поворота приводных бочкообразных роликов 11, центральное колесо 24, шатун 31 и кривошипный вал 16 неизменное положение осей приводных бочкообразных роликов П. После того, как груз 10 дошел до упора 29 и воздействовал на него, рычажный механизм 28 поворота приводных бочкообразных роликов 11, поворачиваясь вокруг шарнира, прижимает колесо 25 к паразитному колесу 26 и таким образом центральное колесо 24 получает вращение против часовой стрелки и возвращает приводные бочкообразные ролики в стабильное положение. Груз 10 перемещается в направлении, параллельном оси конвейера 1 и выходит из зацепления с фрикционным элементом упора 27. При этом кромка груза 10 перемещается по неприводным роликам 40 Г-об- разного конвейера 39 и по ролику 37 упора 29, дальше груз по ускорителю 3 попадает на конвейер 1.
Формула изобретения
01. Устройство для передачи грузов между перпендикулярно расположенными конвейерами, включающее размещенный на раме в зоне пересечения конвейеров транспортирующий механизм с приводными роли, ками, установленный с двух боковых сторон транспортирующего механизма Г-образный конвейер, центральное поворотное колесо, привод, кинематически связанный с последним и упоры, отличающееся тем, что, с целью повышения надежности работы и упро0 щения конструкции, транспортирующий механизм выполнен в виде подпружиненных по вертикали приводных бочкообразных роликов, кинематически связанных между собой и центральным поворотным колесом и установленных с возможностью синхронного поворота на угол 90.
2.Устройство по п. 1, отличающееся тем, что Г-образный конвейер выполнен в виде неприводных роликов, а кинематическая связь привода с центральным поворотным
Q колесом - в виде фрикционной передачи.
3.Устройство по пп. 1 и 2, отличающееся тем, что фрикционная передача имеет рычажный механизм управления поворотом, на котором установлены упоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между перпендикулярно расположенными конвейерами | 1983 |
|
SU1135699A1 |
| Устройство для перекладки листов из тары | 1988 |
|
SU1629258A1 |
| Устройство для резки бруса из пластичного материала | 1985 |
|
SU1342742A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1996 |
|
RU2109670C1 |
| Автомат для укладки рулонов на плоский поддон | 1979 |
|
SU781164A1 |
| Пакеторазборная машина для штучных грузов | 1974 |
|
SU667469A1 |
| Устройство для уборки шпал с железнодорожного пути | 1981 |
|
SU1041612A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2081798C1 |
| Секционный конвейер транспортно-накопительной системы | 1989 |
|
SU1691238A1 |
| Устройство для упаковки сыпучего материала в клапанные мешки | 1982 |
|
SU1113308A1 |
Изобретение относится к пром. транспорту, а именно к перегрузочным устройствам птучных грузов, и позволяет повысить надежность работы и упростить конструкцию. В зоне пересеченья перпендикулярно расположенных конвейеров 1 и 2 размещен на раме транспортирующий механизм (М) 9 с приводными бочкообразными роликами (Р) II. С двух боковых -торон М 9 установлен Г-образный конвейер 39, выполненный в виде неприволн,1х Р 40.- При этом Р И подпружинены но вертикали, кинематически связаны между чЧ)- бой и центральным гюворот1Ц)1м от iipitiui- да колесом (К) 24 и установлены с возможностью синхронного поворота на угол 90. Кинематическая связь привода с К 24 выполнена в виде фрикционной передачи, имеющей рычажный механизм 28, на котором о- тановлены упоры 27 и 29. Груз с KOHneiir- |)а I подается на М 9 до его действия с Р 40 н упором 27. От шн леднего через механизм 28 осуществляем поворот К 24 и связанных с ним Р I I на Ш Груз по Р 11 передается на конвейе ч . а Р II возвращается в исходное по.ю- жение. При подаче с конвейера 2 г|и при взаимодействии с упором 27 noiu:;),: чивает через механизм 28 К 24, а от него I I на 90°. Груз перемен1ается по Р II .lo ina имодействия с Р 40 и упором 29. коп рый через механизм 28 поворачиваег Р I I на 90°, и груз по ним перемещает я па конвейер I. 2 злк ф-лы. 7 n.i. СО с:
// 2/
/
фие.2
фиг.З
J3
фие .6
(рае. f
56
jy
(pu. 1
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ГРУЗА С ОДНОГО КОНВЕЙЕРА НА ДРУГИЕ, РАСПОЛОЖЕННЫЕ ПОД УГЛОМДРУГ К ДРУГУ | 1972 |
|
SU419452A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для передачи грузов между перпендикулярно расположенными конвейерами | 1983 |
|
SU1135699A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
