2.Г
Изобретение относится к .подъемно- транспортному машиностроению и может использоваться для межоперационного транспортирования,
Целью изобретения является обеспечение непрерывного равномерного прямолинейного перемеще ия груза,
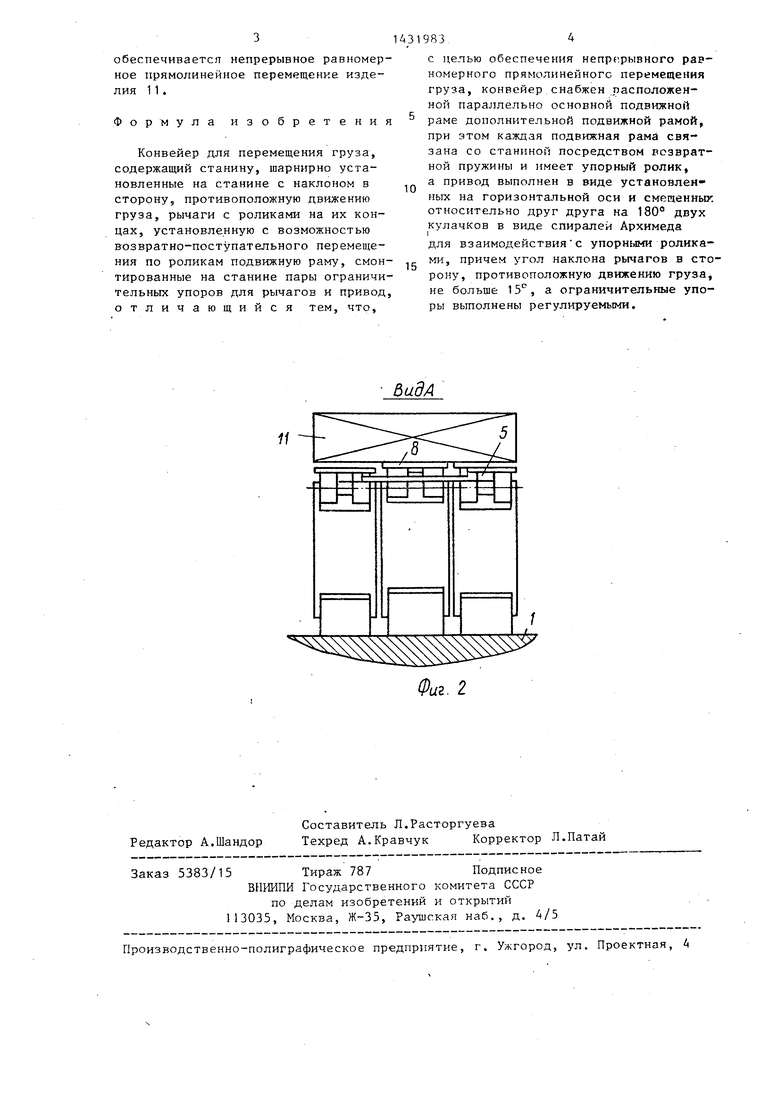
На фиг, 1 изображен конвейер, вид сбоку; на фиг. 2 - вид А на фиг.1.
Конвейер содержит станину 1 с опорами 2, шарнирно установленные на опорах 2 с наклоном в сторону, противоположную движению груза, рычаги 3 с роликами 4 на их концахj уставов- ленную с возможностью возвратно-поступательного перемещения по роликам 4 основную подвижную раму 5; смонтированные на опорах 2 пары регулируемых ограничительных упоров, каждый из которых выполнен в виде винта 6 и гайки 7. Конвейер также снабжен расположенной параллельно основной подвижной раме 5 дополнительной подвижной рамой 8, Дополнительная подвижн ая рама 8 установлена на роликах 9 рычагов 10, которые также закреплены шар- нирно на опорах 2 и установлены с наклоном в сторону, противоположную движению груза - изделия 11, Регули- руемые упоры необходимы для возможности выставки необходимого угла наклона рычагов 3 и 10 в пределах 0-15 . При этом каждая подвижная рама 5 и 8 связана со станиной 1, соответствен- но, посредством возвратных пружин 12 и 13 и имеет, соответственно,: упорный ролик 14 и 15. Привод выполнен в виде установленных на горизонтальной оси 16 и смещенных относительно друг друга на-ISO двух кулачков 17 и 18 в ви де спиралей Архимеда для взаимодействия с упорными роликами 14.и 15.
Приводвыполнен в виде кулачков, имеющих форму спирали Архимеда с це- О.ью придания рамам равномерного перемещения, так как спираль Архимеда - это траектория точки, движущейся с постоянной скоростью от центра окружности по радиусу при равномерном вращении кулачка.
Причем, угол наклона рычагов 3 и 10 в сторону, противоположную движению груза, не больше 15 .
Конвейер работает следующим об- разом.
Транспортируемое изделие 11 навливают на рамы 5 и 8 и включают привод, кулачки 17 и 18 которого перемещают подвижные рамы 5 и 8 в противоположные стороны. Двигаясь вправо , подвижная рама 8 с изделием 11 приподнимается на рычагах 10 и, пере кать заясь по роликам 9, перемещает и де 1не 1 1 в направлении транспортирования. При холостом ходе подвижная рама 8, двигаясь в обратном направлении за счет возвратных пружин 13, опускается на рычагах 10 и,, перекатываясь по роликам 9, возвращается в первоначальное положение, в это врем подвижная рама 5 продолжает рабочий ход, обеспечивая равномерное перемещние транспортируемого изделия -11,
Для работы конвейера необходимо чтобы при рабочем движении сначала произошел подъем рамы, а затем ее горизонтальное перемещение. Обеспечивается это тем, что tg угла наклона рычагов к вертика.ли. должен быть меньше коэффициента трения скольжения на осях роликов о
В частности, коэффициент трения скольжения стального ролика по стальной оси при наличии смазки 0,1, при этом .
Работоспособность конвейера сохраняется, когда значение угла наклона рычагов в крайнем левом (по чертежу) положении рычагов находится внутри интервала . При большем значении угла коэффициент f будет меньще cg угла наклонаS а следовательно, подъема рам на рычагах не произойдет
Для того, чтобы при обратном движении рамы Не нарушалась равномерность движения груза, т.е. чтобы рама, начиная движение назад, сначала опускалась, оставляя груз на второй раме, а потом двигалась назад, пра- вьш упор -{по чертежу) установлен таким образом, чтобы рычагир занимая крайнее правое положение, находились под углом к вертикали в пределах 0-15.
Кроме того, необходимоS чтобы отрыв плоскости рамы от плоскости гру за при обратном движении рамы происходил за возможно малый промежуток времени, т.е. чтобы не было проскальзывания. Это условие зависит от угла наклона рычагов: чем больше угол, тем быстрее происходит отрыв рамы от плоскости груза.
Предлагаемый конвейер имеет высо- производительность за счет встречного движения рам 5 п 8, при этом
31431
обеспечивается непрерывное равномерное прямолинейное перемещение изделия 1 1.
Формула изобретения
Конвейер для перемещения груза, содержащий станину, шарнирно установленные на станине с наклоном в сторону, противоположную движению груза, рычаги с роликами на их концах, установленную с возможностью возвратно-поступательного перемещения по роликам подвижную раму, смонтированные на станине пары ограничительных упоров для рычагов и привод, отличающийся тем, что.
5
9834
с целью обеспечения непрерывного равномерного прямолинейного перемещения груза, конвейер снабжен пасположен- ной параллельно основной подвижной раме дополнительной подвижной рамой, при этом каждая подвижная рама связана со станиной посредством возвратной пружины и имеет упорный ролик, а привод выполнен в виде установлен ных на горизонтальной оси и смепленных. относительно друг друга на 180° двух кулачков в виде спиралей Архимеда для взаимодействия с упорными роликами, причем угол наклона рычагов в сторону, противоположную движению груза, не больше 15, а ограничительные упоры вьшолнены регулируемыми.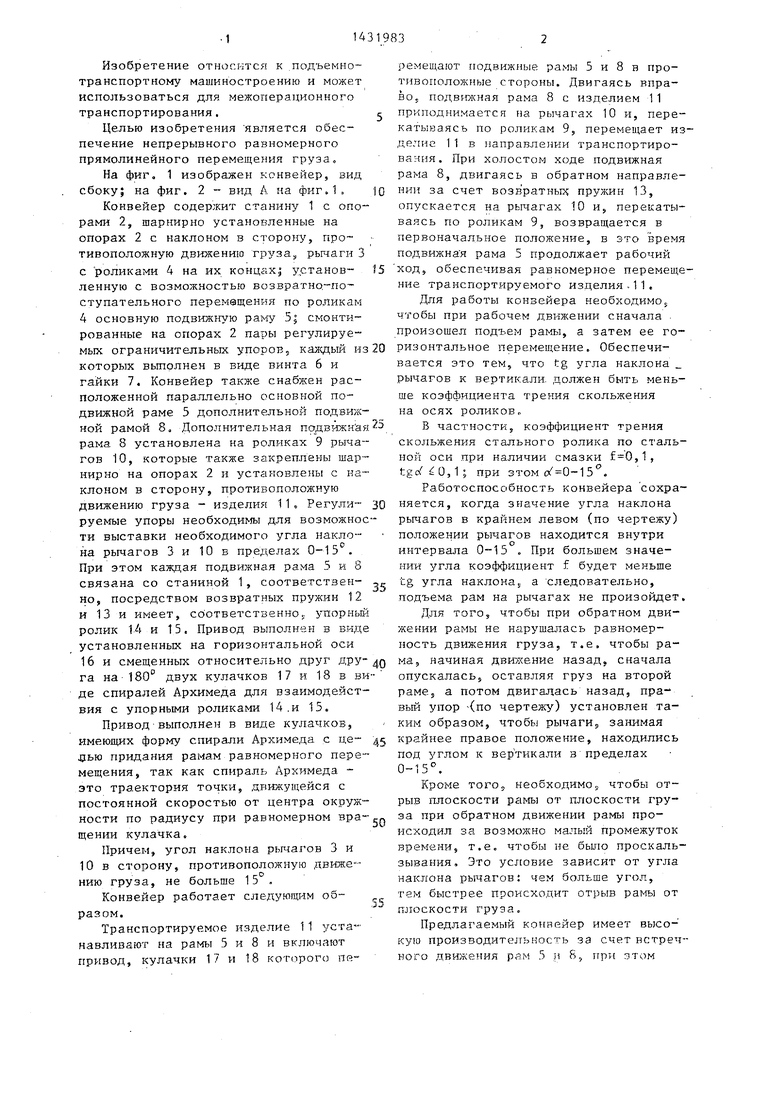
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ЗАЩИТНО-ДЕКОРАТИВНОЙ ОБРАБОТКИ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1994 |
|
RU2079410C1 |
| Шаговый конвейер | 1986 |
|
SU1350083A1 |
| Шаговый конвейер | 1988 |
|
SU1565790A1 |
| Шаговый конвейер | 1988 |
|
SU1525089A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Шагающий конвейер | 1989 |
|
SU1676949A1 |
| ДВУХЦЕПНОЙ КОНВЕЙЕР С РОЛИКОВЫМ НАСТИЛОМ ДЛЯ ТРАНСПОРТИРОВАНИЯ, НАКАПЛИВАНИЯ И ВЫДАЧИ | 1972 |
|
SU335174A1 |
| Шаговый конвейер | 1986 |
|
SU1411241A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ НА ПОДДОНАХ | 2003 |
|
RU2238900C1 |
Изобретение относится к подъемно-транспортному машиностроению и м.б. использовано для межоперационного транспортирования. Цель - обеспечение непрерывного равномерного прямолинейного перемещения груза. На станине шарнирно установлены с наклоном под углом не более 15° в сторону, противоположную движению груза, рычаги 3 и 10 с роликами 4 и 9 на концах. На станине смонтированы пары ограничительных регулируемых упоров. С возможностью возвратно-поступательного перемещения по роликам 4 установлена основная подвижная рама (Р), параллельно которой расположена дополнительная подвижная Р. При этом обе Р связаны со станиной посредством возвратных пружин 12 и 13 соответственно и имеют соответственно упорные ролики 14 и 15. Конвейер имеет привод, вьшолненньм в виде установленных на горизонтальной оси 16 и смещенных относительно друг друга на угол 180° кулачков 17 и 18 в виде спиралей Архимеда для взаимодействия с роликами 14 и 15. Кулачки 17 и 18 перемещают обе Р в противоположные стороны. Дополнительная Р с изделием поднимается на рычагах 10 и, перекатываясь по роликам 9, перемещает изделие в направлении транспортирования. При холостом ходе дополнительная Р, двигаясь в обратном направлении за счет пружин 13, опускается на рычагах 10 и возвращается в исходное положение. В это время основная Р продолжает рабочий .ход. 2 ил. (Л 4 00 с1о хл
дидА
Фаг. 2
| Шаговый конвейер | 1977 |
|
SU648477A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шагающий конвейер | 1974 |
|
SU516587A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
