0US. i
А
СС
СО
ел
05
СО
Изобретение относится к обработке металлов давлением, в частности к устройствам для захватывания и транспортирования плоских полотнищ и секций корпусов судов в процессе их изготовления на по- точных линиях, и может быть использовано и в других отраслях народного хозяйства, например в металлургии, в головках правильно-растяжных машин для правки : листового и профильного проката растя- I жением. Применение устройства позволяет I автоматизировать процесс захватывания и I освобождения растягиваемого изделия.. I Целью изобретения является уменьшение
габаритных размеров и расширение техноI логических возможностей.
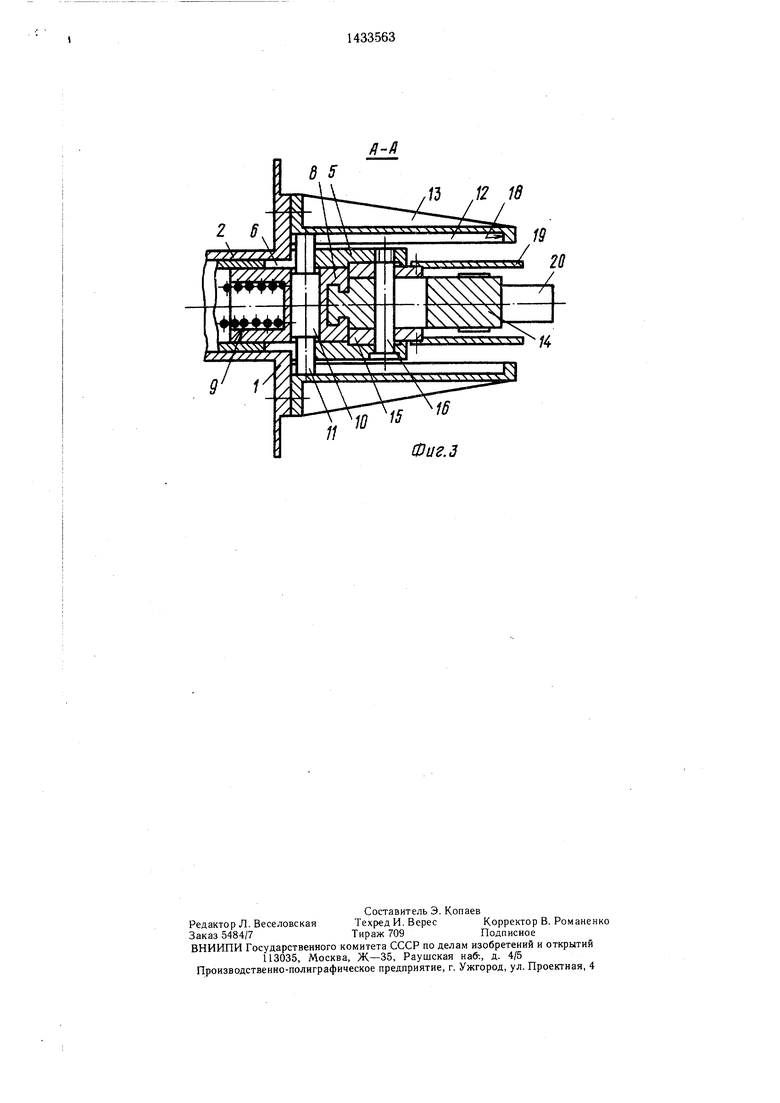
: На фиг. 1 изображено устройство, i продольный разрез; на фиг. 2 - кромка : транспортируемого изделия; на фиг. 3 - ; разрез А-А на фиг. I.
: Зажимное устройство монтируется на хо- довой балке 1 агрегата обжатия ребер I жесткости с полотнищем, которая являет- ; ся корпусом данного устройства. Ходовая : балка снабжена поперечными направляю- I щими 2 цилиндрического сечения. В на- ; правляющей 2 установлен силовой цилиндр ; двустороннего действия с подводом рабочей ; среды через шток 3, прикрепленный к на- ; правляющей 2. К торцу подвижного корпуса 4 силового цилиндра прикреплена вил- ; ка 5, выполненная с горизонтальными
; прорезями бис центральным продольным : отерстием между щеками, образующим ; совместно с торцом корпуса 4 силового ; цилиндра гнездо 7. Внутренние стороны ; щек вилки 5 выполнены с вертикаль- ными пазами. В гнезде 7 установлена ; траверса 8, поджатая пружиной 9. Травер- . са 8 закреплена в гнезде 7 при помощи пальца 10, выполненного с высту- ; пающими концами 11, которые размеще- : ны в прорези 6 вилки бив пазах ; 12 направляющих 13, прикрепленных к ходовой балке 1.
Выступающий из гнезда 7 торец траверсы 8. выполнен с вертикальным Т-образным пазом, в котором размещаются Т-образные хвостовики клиновых губок 14. Клиновые губки 14 установлены в обой- му 15, которая смонтирована в вертикальных пазах вилки 5.
Щеки вилки 5 соединены стяжкой 16, а перемещение обоймы 15 в вилке 5 обеспечивается при этом за счет того, что обойма выполнена с вертикальными прорезями 17. Для беспрепятственного перемещения губок 14 отноительно стяжки 16 внутренние кромки первых имеют соответствующее углубление.
Величина хода клиновых губок 14 в направлении к кромке захватываемого из- делия определяется длиной паза 12 направляющих 13, в которых перемещаются концы 1 пальцев 10. Перемещение губок 14
ограничивается упором 18, представляющим собой торец паза 12.
Для предотвращения сдвижки и обеспечения гарантированного охвата губками 14 плоского изделия, имеющего несколько отогнутую кверху кро.мку, обойма 15 снабжена полозьями 19 и поджата снизу плоской пружиной 20. Полозья 19 выполнены с уклоном, обеспечивающим наползание их и верхней губки 14 на верхнюю плоскость изделия. .
Плоское изделие, подлежащее транспортированию с помощью предлагаемого зажимного устройства, представляет собой либо полотнище, изготовленное из листового проката, либо секцию (металлоконструкт ию), включающую полотнище 21 и ребра 22 жесткости и располагается на неприводных роликоопорах 23.
Устройство работает следующим образом.
В исходном положении корпус 4 силового цилиндра полностью надвинут на неподвижный щток 3, при этом клиновые губки 14 максимально удалены от кромки плоского изделия. Устройство располагается таким образом, чтобы при выдвижении к изделию клиновые губки 14 находились между ребрами 22 жесткости. При подаче давления в поршневую полость силового цилиндра его корпус 4 и прикрепленная к нему вилка 5 перемещаются в направлении к плоскому изделию. Вместе с ними перемещаются траверса 8 с пружиной 9 и пальцем 10, обойма 15 с губка.ми 14 и полозьями 19. При встрече полозьев 19 с кромкой полотнища 21 первые под действием вертикальной составляющей надвигаются на верхнюю плоскость полотнища 21, увлекая за собой обойму 15 и обеспечивая тем самым охват полотнища клиновыми губками 14. Совместное перемещение всех перечисленных элементов устройства происходит до тех пор, пока выступающие концы 1 1 пальцев 10 не достигнут упора 18 в направляющих 13. В этот момент движение траверсы 8 с губками 14 в указанном направлении прекращается.
Дальнейщее движение корпуса 4 силового цилиндра и связанных с ним вилки 5 и обоймы 15 приводит к сжатию пружины 9 и к сближению клиновых губок 14. Это движение осуществляется до тех пор, пока клиновые губки 14 не зажмут плоское изделие или пока задние торцы прорезей 6 вилки 5 не соприкоснутся с выступающими концами 11 пальца 10.
На этом процесс захватывания плоского изделия или полного сближения клиновы.х губок 14 заканчивается.
В процессе транспортирования вертикальные усилия колеблющегося плоского изделия передаются губкам 14 и обойме 15. Под действием этого усилия обойма 15 перемещается вертикально в пазах вилки 5, а вертикальное перемещение губок 14
относительно траверсы 8 обеспечивается за счет того, что Т-образные хвостовики губок 14 помещены в Т-образные вертикальные пазы траверсы 8.
После окончания транспортирования плоского изделия подается давление в штоко- вую полость силового цилиндра, в результате чего корпус 4 силового цилиндра и связанные с ним вилка 5 и обойма 15 перемещаются в направлении от плоского
лозьев; следить за кромкой плоского изделия в процессе транспортирования, не препятствуя вертикальным колебаниям этой кромки.
Формула изобрегения
1. Зажимное устройство для плоских изделий, содержащее корпус, размещенный в нем силовой цилиндр, связанные с циизделия. При этом концы II пальца 10, линдром траверсу и обойму с клиновыми поджатые через траверсу 8 пружиной 9, губками, отличающееся тем, что, с целью
в начале движения корпуса 4 силового цилиндра продолжают оставаться неподвижными и соприкасаться с упором 18 направляющих 13.
Губки 14 также остаются у кромки плоского изделия, но раздвигаются под действием пружины 9, освобождая кромку этого изделия., После полного разжатия пружины 9 и разведения клиновых губок 14 вместе с корпусом 4 силового цилиЕщра вилкой 5 и обоймой 15 начинается совместное перемещение в указанном направлении траверсы 8 с пружиной 9 и пальцем 10, а также губок 14. Это движеуменьшения габаритных размеров и расширения технологических возможностей, оно снабжено закрепленной на подвижной части
15 цилиндра, имеющей гнездо, вилкой с нарал- лельными продольной оси цилиндра прорезями и перпендикулярными им пазами в ее стенках, установленной между подвижной частью цилиндра и траверсой пружиной сжатия, расположенным в траверсе перпен20 дикулярно продольной оси цилиндра пальцем, закрепленными на обойме и расположенными параллельно прорезям вилки полозьями, смонтированной на корпусе и установленной с возможностью взаимодейстлозьев; следить за кромкой плоского изделия в процессе транспортирования, не препятствуя вертикальным колебаниям этой кромки.
Формула изобрегения
уменьшения габаритных размеров и расширения технологических возможностей, оно снабжено закрепленной на подвижной части
15 цилиндра, имеющей гнездо, вилкой с нарал- лельными продольной оси цилиндра прорезями и перпендикулярными им пазами в ее стенках, установленной между подвижной частью цилиндра и траверсой пружиной сжатия, расположенным в траверсе перпен20 дикулярно продольной оси цилиндра пальцем, закрепленными на обойме и расположенными параллельно прорезям вилки полозьями, смонтированной на корпусе и установленной с возможностью взаимодейст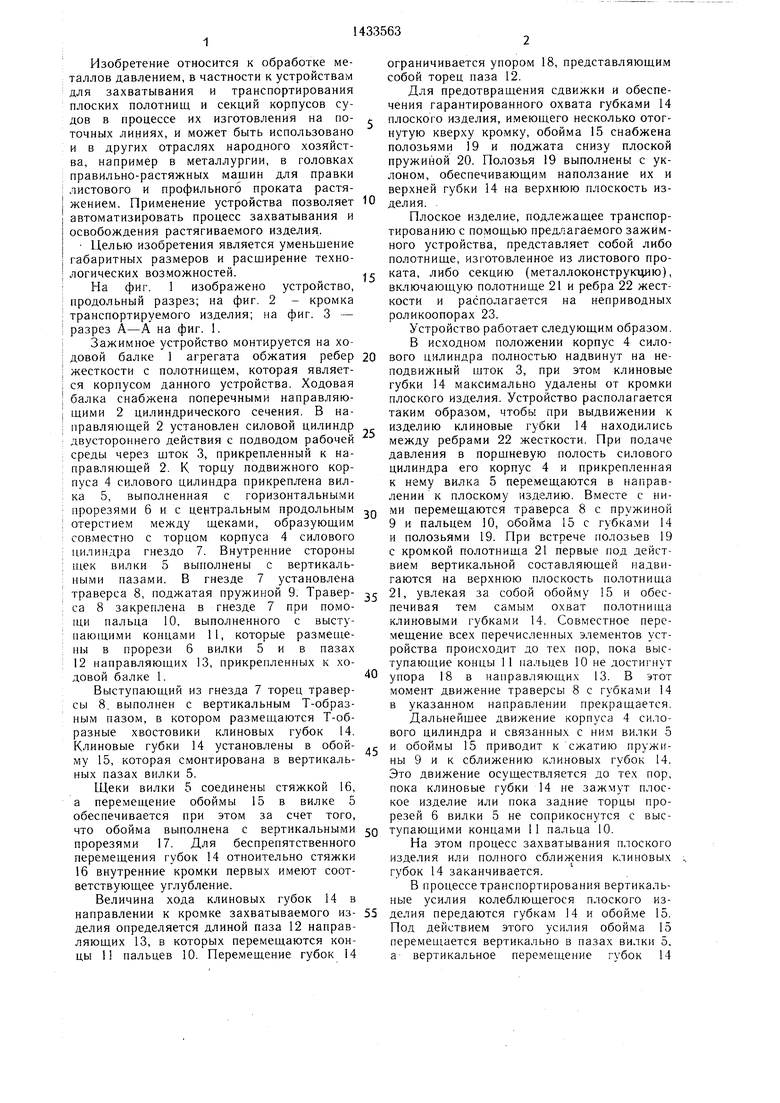
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для прижима балок | 1971 |
|
SU449869A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Ручной механизированный инструмент для установки заклепок | 1974 |
|
SU604673A1 |
| Автомат для сгибания фигурных изделий | 1981 |
|
SU963646A1 |
| Стенд для сборки и сварки изделий | 1985 |
|
SU1338997A1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1998 |
|
RU2129091C1 |
| Захват | 1982 |
|
SU1024270A1 |
| Транспортная система гибкой автоматической линии | 1976 |
|
SU722731A1 |
| Устройство для гидромеханического прессования | 1988 |
|
SU1590147A1 |
| Зажимная головка правильно-растяжной машины | 1982 |
|
SU1026894A1 |
Изобретение относится к обработке металлов давлением. Цель - уменьшение габаритных размеров и расширение технологических возможностей устройства. Устройство состоит из корпуса 1, встроенного в него силового цилиндра с траверсой 8, клиновых губок (Г) 14 и охватывающей их обоймы 15, выполненной с гнездом и продольными прорезями. Траверса 8 установлена в гнезде 7 вилки (В) 5 с возможностью горизонтального поступательного перемещения и снабжена пружиной 9 и пальцем 10 с выступающими концами, помещенными в прорези В5. Обойма 15 установлена в В5 с возможностью вертикального поступательного перемещения и снабжена полозьями 19, взаимодействующими с кромкой плоского изделия 21. Корпус 1 снабжен пружиной 20, поддерживающей обойму 15, и направляющими, взаимодействующими с концами пальца 10. При подаче давления в силовой цилиндр происходит перемещение траверсы 8 обоймы 15 с Г 14 и полозьями 19, которые при встрече с кромкой полотнища изделия 21 увлекают обойму 15 и обеспечивают охват полотнища изделия Г14. 1 з.п. ф-лы, 3 ил. i (Л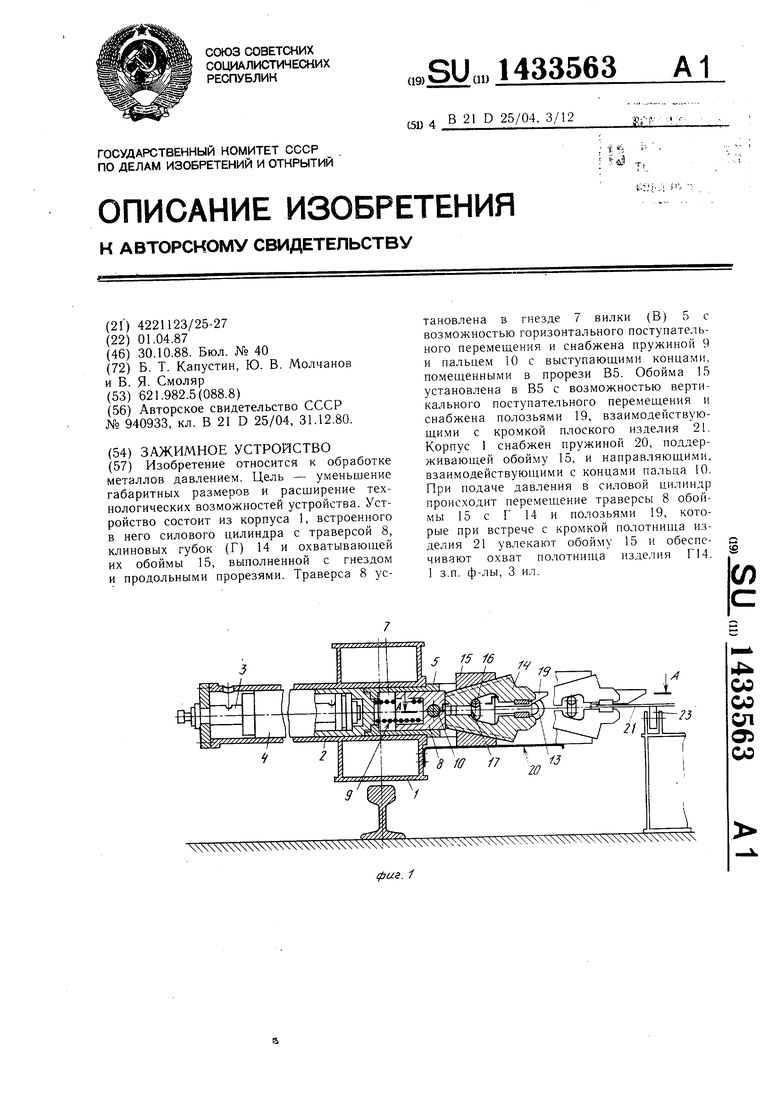
ние осуществляется до тех пор, пока корпус 25 обоймой плоской пружиной и закреп- 4 силового цилиндра не окажется полностью надвинутым на шток 3. При этом все элементы захватного устройства вновь занимают исходное положение.
Применение устройства позволяет уменьленными на корпусе параллельно прорезям вилки направляющими, при этом траверса размещена в гнезде вилки с возможностью перемещения в направлении продольной оси цилиндра, концы пальца расположены в
щить габаритные размеры (в частности, 30 прорезях стенок вилки и в направляющих.
а обойма установлена в пазах вилки с возможностью перемещения в перпендикулярном относительно перемещения траверсы направлении.
размер по высоте) и встроить устройство в ходовую балку агрегата; упростить конструкцию за счет использования одного привода для осуществления двух рабочих движений (выход клиновых губок на кромку
фиг.2
обоймой плоской пружиной и закреп-
ленными на корпусе параллельно прорезям вилки направляющими, при этом траверса размещена в гнезде вилки с возможностью перемещения в направлении продольной оси цилиндра, концы пальца расположены в
12 Id
16
Фиг.з
| Зажимное устройство правильно-растяжной машины | 1980 |
|
SU940933A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
