Изобретение относится к горной и строительной отраслям промышленности, в частности, к одноковшовым экскаваторам.
Процесс копания экскаватором осуществляют поворотом ковша, поворотом рукояти и совмещением поворота ковша и рукояти, причём толщина стружки регулируется посредством подъёма или опускания стрелы.
При копании зубья ковша осуществляют процесс резания грунта, характеризующийся углом резания, т.е. углом между передней граню зуба и поверхностью среза. Угол резания может изменяться в зависимости от режима копания и влияет на величину силы резания зубьями ковша.
Обеспечение определенного оптимального значения угла резания позволяет снизить величину силы резания зубьями ковша, что позволяет уменьшить энергоёмкость процесса копания, производить разработку более прочных грунтов, расширить технологические возможности экскаватора.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является рабочее оборудование экскаватора, содержащее стрелу, рукоять, ковш, датчик углового положения стрелы, датчик углового положения рукояти, датчик углового положения ковша и блок управления движением элементов рабочего оборудования (EP 1835079 опубл. 19.09.2007). Данное устройство принято за прототип.
Недостатком известного устройства, принятого за прототип, является сложность обеспечения наименьшей энергоёмкости процесса копания движением элементов рабочего оборудования в отдельности и возможном совмещении рабочих движений при использовании ручного управления стрелой, рукоятью и ковшом.
Признаки прототипа, являющиеся общими с заявленным устройством, – ковш с зубьями, стрела, рукоять, гидравлический привод для их управления, датчики углового положения стрелы, рукояти, ковша, соединенные с блоком управления движением элементов рабочего оборудования.
Задача изобретения заключается в снижении энергоёмкости процесса копания и расширении технологических возможностей экскаватора.
Технический результат – обеспечение оптимального угла резания при движении ковша или рукояти в отдельности и возможном совмещении рабочих движений элементов рабочего оборудования при использовании ручного управления стрелой, рукоятью и ковшом.
Указанный технический результат достигается тем, что в известном рабочем оборудовании экскаватора, содержащем ковш с зубьями, стрелу, рукоять, гидравлический привод для их управления, датчики углового положения стрелы, рукояти, ковша, соединенные с блоком управления движением элементов рабочего оборудования, согласно изобретению, ковш экскаватора снабжен датчиком углового положения зубьев, соединенным с блоком управления движением элементов рабочего оборудования, а зубья ковша закреплены на валу, который рычагами связан с гидроцилиндрами, управляемыми посредством гидрораспределителя блоком управления движением элементов рабочего оборудования на основании информации от датчиков углового положения зубьев, стрелы, рукояти и ковша.
Отличием предлагаемого устройства от прототипа является наличие на ковше датчика углового положения зубьев, установка зубьев ковша на валу, который рычагами связан с гидроцилиндрами, управляемыми посредством гидрораспределителя блоком управления движением элементов рабочего оборудования на основании информации от датчиков углового положения зубьев, стрелы, рукояти и ковша.
Отличительные признаки в совокупности с известными позволят обеспечить оптимальный угол резания при движении ковша или рукояти в отдельности и возможном совмещении рабочих движений элементов рабочего оборудования при использовании ручного управления стрелой, рукоятью и ковшом. Благодаря этому снижается энергоёмкость процесса копания и расширяются технологические возможности экскаватора.
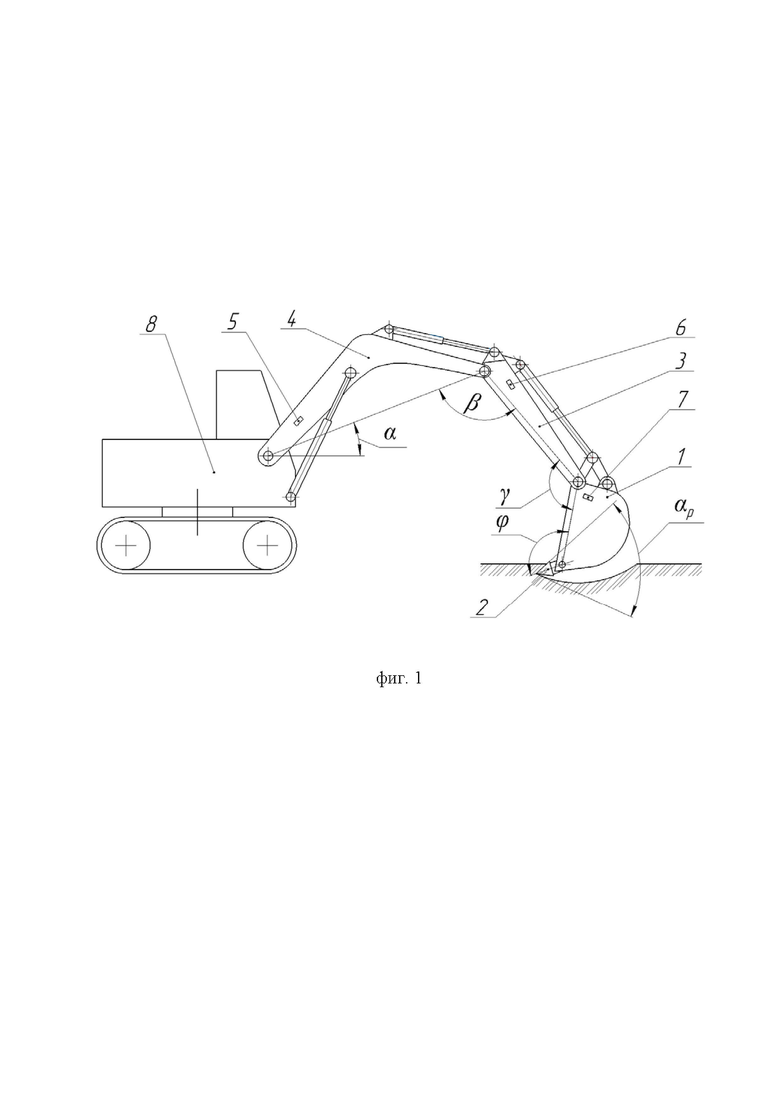
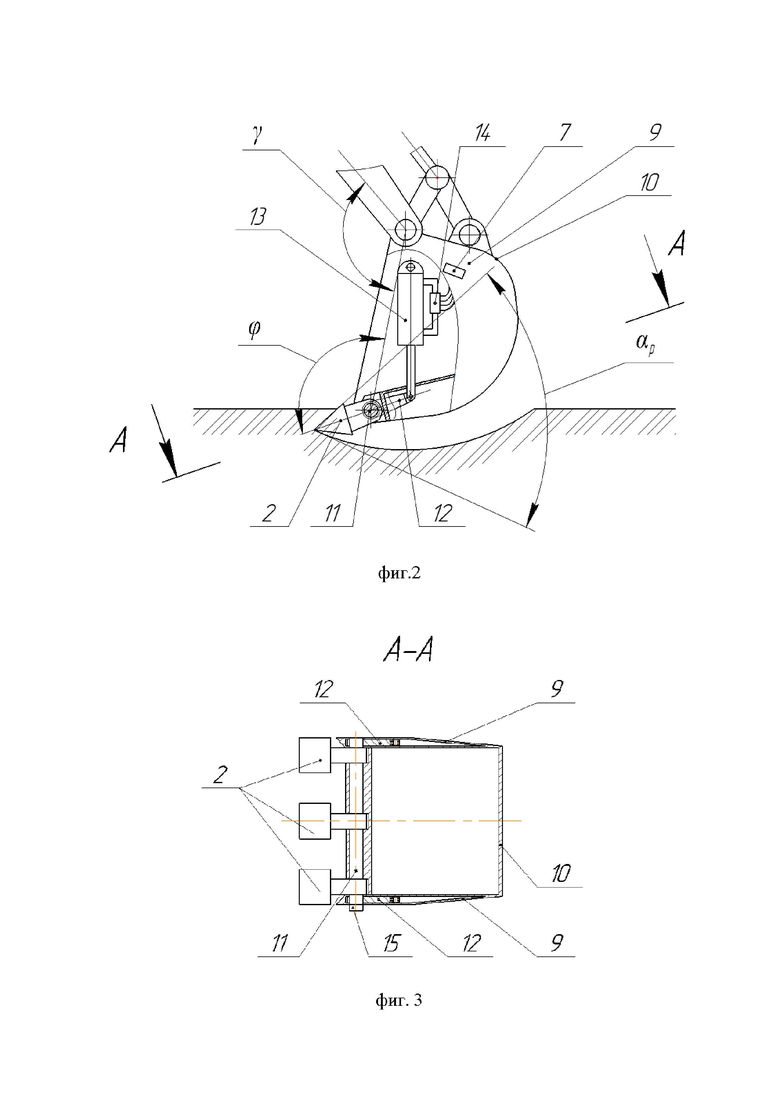
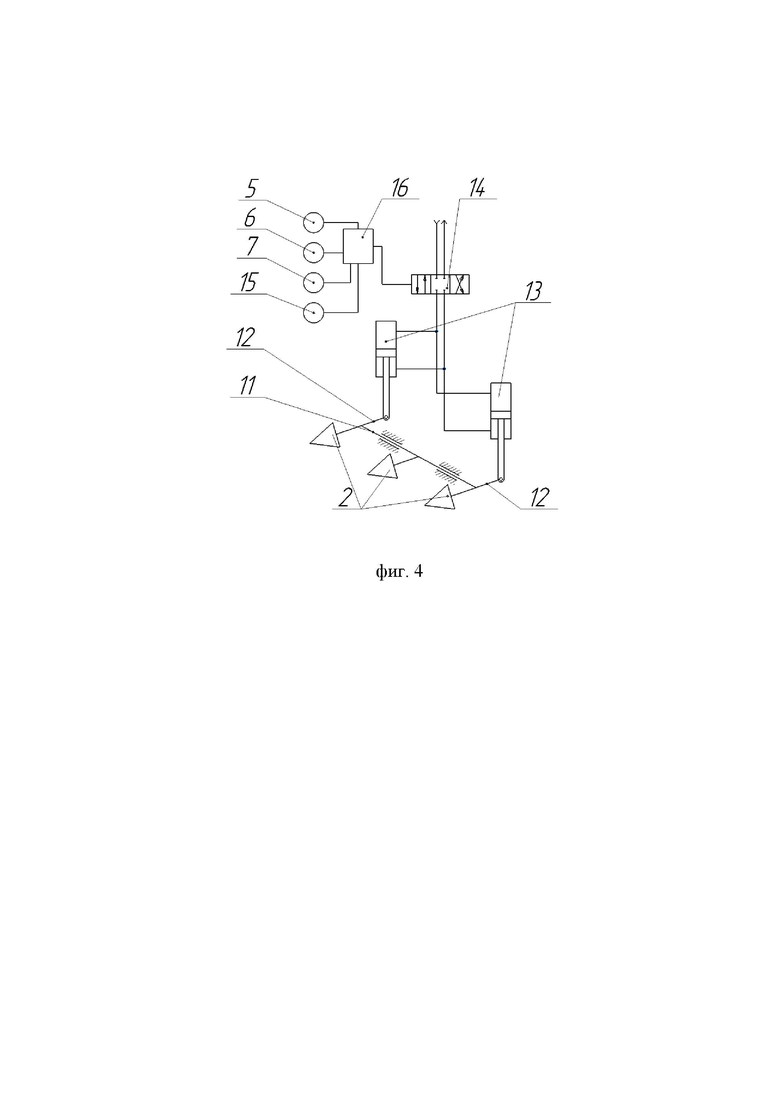
На фиг. 1 изображен экскаватор, вид сбоку; на фиг. 2 изображен общий вид ковша экскаватора; на фиг.3 - разрез А-А; на фиг. 4 – электрогидравлическая схема устройства.
Рабочее оборудование экскаватора (фиг.1) включает ковш 1 с зубьями 2, рукоять 3, стрелу 4, гидравлический привод для их управления, датчики углового положения стрелы 5, рукояти 6 и ковша 7. Рабочее оборудование экскаватора укреплено на поворотной платформе 8.
Ковш 1 с зубьями 2 шарнирно соединен с рукоятью 3, которая связана со стрелой 4, укрепленной на поворотной платформе 8. Гидравлический привод рабочего оборудования позволяет изменять положение стрелы, рукояти и ковша посредством гидроцилиндров. Датчики углового положения стрелы 5, рукояти 6 и ковша 7 устанавливаются, соответственно, на стреле 4, рукояти 6 и ковше 7 с возможностью измерения.
Ковш экскаватора содержит (фиг. 2, 3 ) боковые стенки 9, заднюю стенку 10, зубья 2, жестко соединенные между собой, валом 11 и рычагами 12. Гидроцилиндры 13, шарнирно соединенные с боковыми стенками 9 и рычагами 12, обеспечивают поворот зубьев 2 относительно стенок ковша, что позволяет при процессе копания изменять угол резания αр. Для управления гидроцилидрами 13 применяется гидрораспределитель 14. Измерение углового положения рабочего оборудования, производится датчиками углового положения зубьев 15 (измеряется угол φ), стрелы 5 (измеряется угол α), рукояти 6 (измеряется угол β), ковша 7 (измеряется угол γ). Управление работой устройства осуществляется блоком управления движением элементов рабочего оборудования 16 (фиг . 4).
Устройство работает следующим образом.
При процессе копания информация от датчиков углового положения зубьев 15, стрелы 5, рукояти 6, ковша 7 передается в блок управления движением элементов рабочего оборудования 16, который определяет требуемое положение зубьев 2 относительно стенок ковша для обеспечения оптимального значения угла резания αр и подает сигнал управления на гидрораспределитель 14, который осуществляет управление гидроцилиндрами 13, что позволяет посредством рычагов 12 и вала 11 поворачивать зубья 2 относительно стенок ковша и устанавливать их в требуемое положение для обеспечения оптимального значения угла резания αр.
Преимущество заявляемого устройства состоит в том, что при использовании ручного управления стрелой, рукоятью и ковшом появляется возможность обеспечивать оптимальный угол резания зубьями ковша при копании поворотом ковша, поворотом рукояти и совмещением поворота ковша и рукояти, а так же подъёма или опускания стрелы, что позволяет снизить энергоёмкость процесса копания и расширить технологические возможности экскаватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ЭКСКАВАТОРА | 2024 |
|
RU2833979C1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1969 |
|
SU626168A1 |
| Устройство для управления ковшомэКСКАВАТОРА | 1978 |
|
SU804789A1 |
Изобретение относится к горной и строительной отраслям промышленности, в частности к одноковшовым экскаваторам. Технический результат - обеспечение оптимального угла резания при движении ковша или рукояти в отдельности и возможном совмещении рабочих движений элементов рабочего оборудования при использовании ручного управления стрелой, рукоятью и ковшом. Рабочее оборудование экскаватора содержит ковш с зубьями, стрелу, рукоять, гидравлический привод для их управления, датчики углового положения стрелы, рукояти, ковша, соединенные с блоком управления движением элементов рабочего оборудования. Ковш экскаватора снабжен датчиком углового положения зубьев, соединенным с блоком управления движением элементов рабочего оборудования. Зубья ковша закреплены на валу, который рычагами связан с гидроцилиндрами, управляемыми посредством гидрораспределителя блоком управления движением элементов рабочего оборудования на основании информации от датчиков углового положения зубьев, стрелы, рукояти и ковша. 4 ил.
Рабочее оборудование экскаватора, содержащее ковш с зубьями, стрелу, рукоять, гидравлический привод для их управления, датчики углового положения стрелы, рукояти, ковша, соединенные с блоком управления движением элементов рабочего оборудования, отличающееся тем, что ковш экскаватора снабжен датчиком углового положения зубьев, соединенным с блоком управления движением элементов рабочего оборудования, а зубья ковша закреплены на валу, который рычагами связан с гидроцилиндрами, управляемыми посредством гидрораспределителя блоком управления движением элементов рабочего оборудования на основании информации от датчиков углового положения зубьев, стрелы, рукояти и ковша.
| Способ изготовления основного элемента волоконно-оптического кабеля связи и устройство для его изготовления | 1990 |
|
SU1835079A3 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА КОВША ЭКСКАВАТОРА | 0 |
|
SU290998A1 |
| Г. И. Носова | 0 |
|
SU353002A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| US 4805086 A, 14.02.1989 | |||
| JP 10317417 A, 02.12.1998 | |||
| CN 210712995 U, 09.06.2020. | |||

