Изобретение относится к захватньп устройствам промышленных роботов и касается захватных устройств для объектов, допускающих-Строго опреде- ленные захватные усилия.
Целью изобретения является повышение надежности и расширение функциональных возможностей захватных устройств за счет обеспечения строго за данных захватных усилий, а также уст ранение возможности перегрузки приводного электродвигателя.
На чертеже представлена кинематическая схема устройства
Неподвижный захватный, элемент 1 жестко уст ановлен на кронштейне .2, (который с помощью замка 3 крепится к манипулятору, На кронштейне 2 жестко укреплены также направляющие 4 и зуб- чатая рейка 5. На направляющих 4 с возможностью перемещения по ним установлена каретка 6, на которой жестко закреплен приводной двигатель 7, валы которого несут кулачки 8 и 9 (трех- :центровые). С кулачками 8 и 9 взаимодействуют вилки 10 и 11 рычагов 12 и 13, вторые концы которых оканчиваются /шарнира.ми 14 и 15, связанные, с рычага ми 16 и 17, жестко укрепленнь&ш на внешних обоймах обгонных муфт 18 и 19 Внутренние обоймы 20 и 21 обгонных муфт жестко закреплены на осях 22- и 23, одни из концов которых находятся в подшипниках, а вторые жестко связа- ны с полумуфтами- электромагнитных 24 и 25. Вторые полумуфты электромагнитных муфт 24 и 25 жестко ус- тановлены на валу 26, на котором также жестко .уст ановлено зубчатое коле- со 27, находящееся в зацеплении с зубчатой рейкой 5. В средней -части рычаги 12 и 13 имеют пальцы 28 и 29, шарнирно связанные с ползунами 30 и 315 находящимися в вилках 32 и 33,, которые установлены с возможностью поворота в кронштейнах 34 и 35, жестко связанных с зажимной кареткой 6, причем концы вилок снабжены рычагами 36 и 37. Вилка 33 снабжена также
направляющей 38 возвратной пружины 39, которая вторым концом взаимодействует с винтом 40, установленным в гайке 41, жестко связанной с кронштейном 35, а вилка 32 снабжена воз- вратной пруясиной 42. Каретка 6 имеет направляющие 43 и 44, в которых расположен стержень 45, несущий подвиж- ньй зажимной элемент;46, На втором
«
JQ
5
0 5 0 5 О 5
0
конце стержня расположена вилка 47, :в которой находится рычаг 37, а также упор 48 . Рычаг 36 благодаря наличию пружины 42 контактирует с упором 4.9, установленным на направляющей 4.
В устройстве используются так называемые нормально замкнутые электромагнитные муфты, т.е. муфты, полумуфты которых замкнуты при отсутствии напряжения на обмотке и разомкнуты при наличии напряжения.
Устройство работает следующим образом.
В исходньш момент времени каретка 6 находится в крайнем правом положении, при котором Вилка 32 расположена вертикально, а вилка 33 под действием пружины 39 повернута в крайнее правое положение, причем рычаг 37 выдвинул стержень 45 влево настолько, насколько позволяет упор 48. Кроме того, напряжение на электромагнитных муфтах 24 и 25 отсутствует (их полу- муфты сомкнуты).
После наведения захватного устройства на груз система управления промышленного робота подает сигнал на электромагнитную муфту 24, полумуфты которой при этом размыкаются, а затем на электродвигатель 7, вал которого начинает вращаться. Поскольку вилка 33 находится в положении, отличном от вертикального, то вертикальные колебания вилки 11, вызываемые вращением кулачка 9, сопровождаются ее горизонтальными смещениями, что, в свою очередь, приводит к колебаниям относительно Среднего положения рычага 17, а следовательно и внешней обоймы обгонной муфты 19. Эти колебания, очевидно, приводят к повороту оси 23 и вала 26 против, часовой стрелки, а поскольку зубчатое колесо 27 взаимодействует с рейкой 5, которая жестко закреплена на кронштейне 2, поворот колеса 27 вызывает смещение каретки 6 влево. Смещение зажимной каретки 6 влево приводит к тому, что подвижный зажимной элемент 46 входит в контакт с грузом и дальнейшее смещение каретки 6 приводит к смещению зажимного элемента 46 вправо относительно каретки 6. Смещение зажимного элемента 46, а следовательно, и стержня 45 вправо относительно каретки 6 приводит к повороту вправо рычага 37, который сопровождается сжатием пружины
3, 14
39. Пружина 39 сжимается до тех пор, пока вилка 33 не .займет вертикального положения. В момент, когда вилка 33 займет вертикальное положение, вертикальные колебания вилки 11 перестанут сопровождаться ее горизонтальным смещением, следовательно, каретка 6 остановится. После этого система управления роботом отключает двигатель 7 и электромагнитную муфту 24, полумуфты которой сомкнуты, что приводит к заклиниванию зажимной каретки 6. Очевидно, что при этом усилие, с которым подвижный элемент 46 прижимает груз к неподвижному зажимному элементу 1, определяется силой сжатия пружины 39. Для освобождения груза система управления роботом включает электромагнитную муфту 25, полумуфты которой при этом размыкаются, и электродвига- тель 7. Поскольку в этот момент пружина 42 удерживает рычаг 36 в крайнем
новлен на корпусе, а другой выполнен 15 приводным, отличающееся тем, что, с целью повышения надежности и расширения функциональных возмож ностей, захватное устройство снабжено кареткой, установленной на корпусе с возможностью перемещения и снабженной приводом, выполненным в виде двигателя, установленного жестко на ней и кинематически связанного посредством кулачково-ползунных вариаторов с иаправом положении, то 32 отклонена от вертикали на максимальную ве- 25 ружными обоймами обгонных муфт, уста- личину..При этом вертикальные коле-новленных на-каретке, а внутренние
бания вилки 10 сопровождаются ее го- обоймы обгонных муфт через электро- ризонтапьными перемещениями, что при- магнитные муфты встречно связаны с водит к колебаниям рычага 16, а еле- зубчатым колесом, имеющим возможность довательно, и внешней обоймы обгонной зо взаимодействия с зубчатой рейкой, муфты 18. Это приводит к повороту оси жестко закрепленной на корпусе захват- ;22, а значит, и вала 26 по часовойного устройства, при этом приводной
стрелке, т.е. к смещению каретки 6захватный элемент подвижно установлен
вправо, которое происходит до тех пор, на каретке и подпружинен относительно
вертикальное положение. При этом вилка 32 также занимает вертикальное положение и смещение каретки прекращается, после чего система управления роботом отключает двигатель 7 и электромагнитную муфту 25.
Формула изобретения
Адаптивное захватное устройство, содержащее корпус и захватные злемен
новлен на корпусе, а другой выполнен приводным, отличающееся тем, что, с целью повышения надежности и расширения функциональных возмож ностей, захватное устройство снабжено кареткой, установленной на корпусе с возможностью перемещения и снабженной приводом, выполненным в виде двигатея, установленного жестко на ней и кинематически связанного посредством кулачково-ползунных вариаторов с иаружными обоймами обгонных муфт, уста- новленных на-каретке, а внутренние
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| Устройство для нанесения окрасочных покрытий | 1986 |
|
SU1389874A1 |
| Устройство для вырубки из листа заготовок,расположенных в шахматном порядке | 1979 |
|
SU839123A1 |
| Коробка передач | 1986 |
|
SU1350416A2 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Устройство для позиционной обработки брусковых деталей | 1980 |
|
SU912494A1 |
| Устройство для подачи ленточного и полосового материала в рабочую зону пресса | 1989 |
|
SU1706763A1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ ПЛЕТЕНОЙ ТЕСЬМЫИЗ ПРЯДЕЙ | 1972 |
|
SU352978A1 |
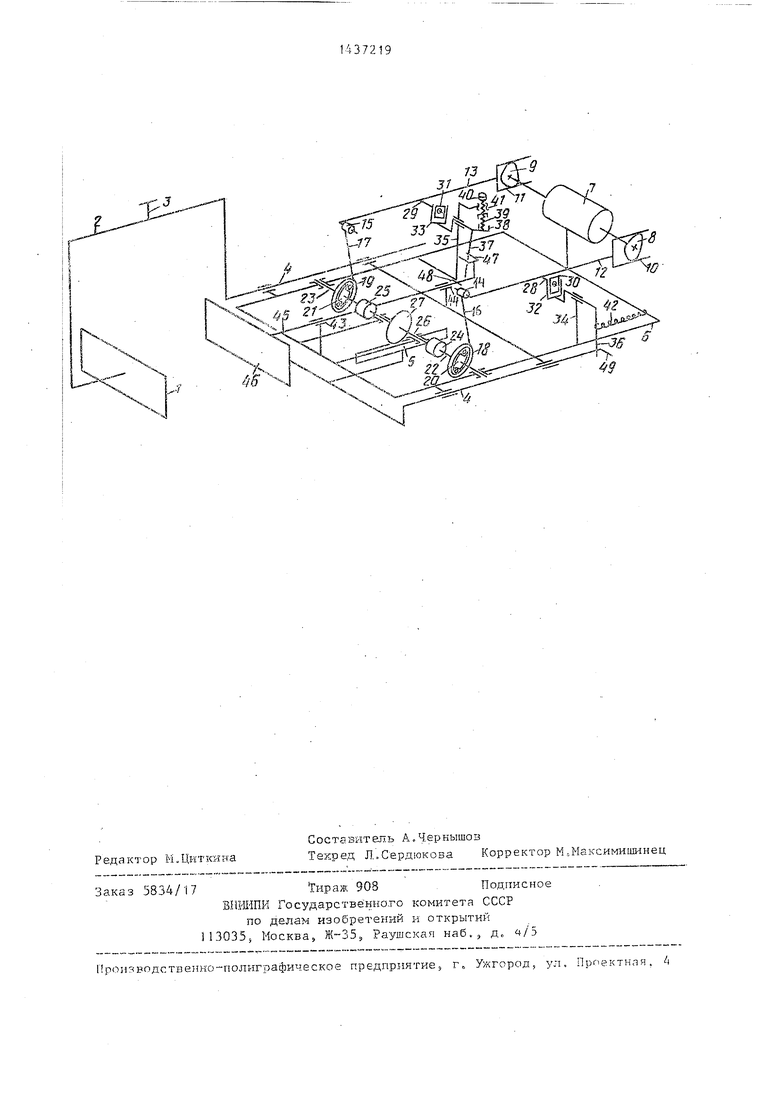
Изобретение относится к захватным устройствам промышленных роботов и касается захватных устройств д.пя объектов, допускающих строго определенные захватные усилия. Целью изобретения является повышение надежности и pacuiHpeHtie функциональных возможностей захватных устройств за счет обеспечения строго заданных захватных усилий, а также устранение возможности перегрузки приводного электродвигателя. Устройство содержит корпус с жестко закрепленным на нем захватным элементом 1 и зубчатой рейкой 5. В направляющих 4 корпуса установлена с возможностью перемещения каретка 6, на которой жестко установлен приводной двигатель 7 с кулачками 8 и 9 на его валу. Кулачки 8 и 9 взаимодействуют с рьиагамн 12 и 13, которые связаны через обгонные муфты 18 и 19, электромагнитные муфты 24 и 25 с зубчатым колесом 27. Включение электродвигателя 7 приведет к вращению внутренних обойм обгонных муфт и к вращению зубчатого колеса 27. Зубчатое колесо 27, взаимодействуя с рейкой 5, приведет к смещению каретки 6, на ко- торой подвижно установлен зажимной элемент 46, подпружиненньй пружиной 39 относительно каретки 6. Усилие, с которым подвижной элемент 46 прижимает деталь к неподвижному зажимному элементу 1, определяется силой сжатия пружины 39. 1 ил. N« {; 00 1чЭ
пока упор 49 не приведет рычаг 36 в
35
него.
8
О
9
| Захватное устройство | 1985 |
|
SU1310201A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
