f/
Изобретение относится к машиностроению, а именно к манипуляторам с6орох1ного производства, и может быт использовано в любых отраслях народнего хозяйства для выполнения опера- дай загрузки, выгрузки и ориентации изделий на сборочных автоматах.
Целью изобретения является расширение технологических возможностей за счёт увеличения точек позиционирования .
На фиг, 1 изображен манипулятор сборочного автомата, вид сбоку; на
ное плечо 26, расположенное под гнездом 27 в штоке 12. На планке 3 и штоке 12 на расстоянии о , равном раст стоянию перемещения концов плеч 24 и 26, от воздействия упора на технологическом оборудовании выполнены гнезда 28 и 29. В гнезда могут вставляться упоры 30 и 31 в виде штифтов.
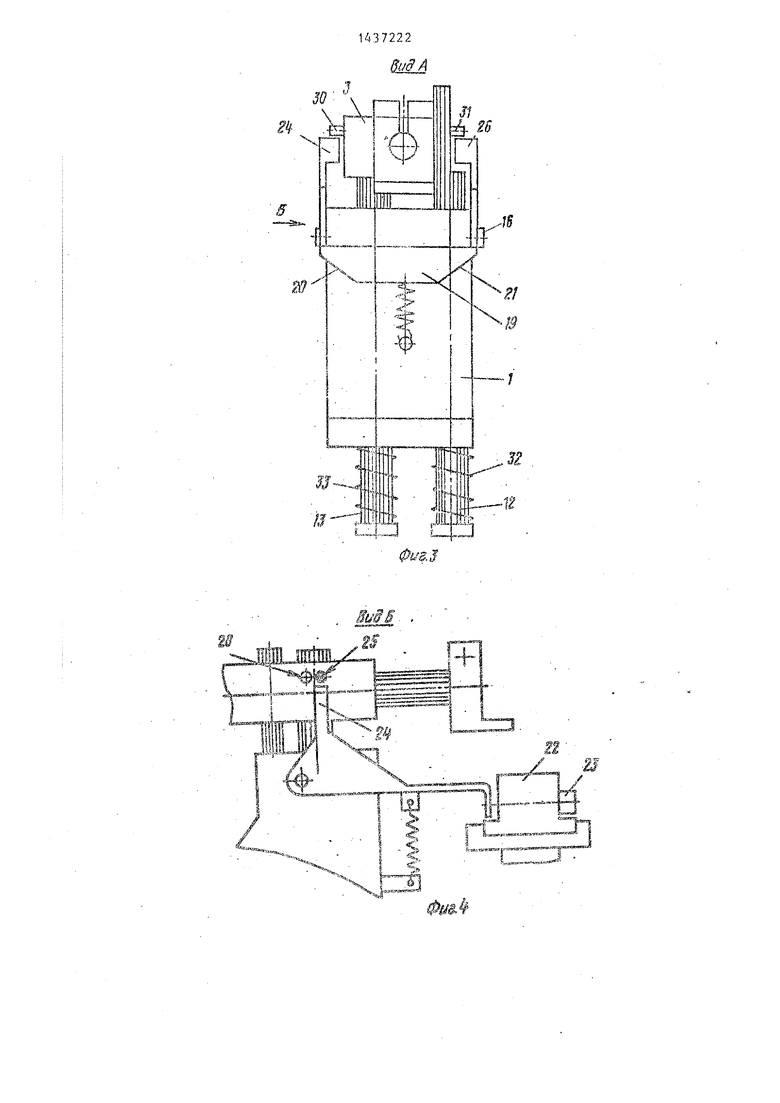
Штоки 12 и 13 подпружинены вниз пружинами 32 и 33. На передний конец пиноли закрепляется хомут 34 для крепления захватов.
Манипулятор сборочного автомата
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки контактов в колодки разъемов | 1988 |
|
SU1552276A1 |
| Многопозиционный сборочный автомат | 1981 |
|
SU921760A1 |
| Роторный автомат для сборки деталей запрессовкой | 1978 |
|
SU872171A1 |
| Автоматическая линия для изготовления гнутосварных дисков из пруткового материала | 1979 |
|
SU927465A1 |
| Многопозиционный автомат для сборки узлов | 1989 |
|
SU1660925A1 |
| Автоматизированная сборочная линия | 1985 |
|
SU1306691A1 |
| Устройство для запрессовки пружинных контактов в гнезда колодки | 1985 |
|
SU1405093A2 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Установка для сварки | 1990 |
|
SU1756084A1 |
| Устройство для сборки запрессовкой стержневых деталей с пластинами | 1986 |
|
SU1380893A1 |
Изобретение относится к манипу- -ляторам сборочного производства и может быть использовано для выполнения операций загрузки, выгрузки и ориентации изделий на сборочных автоматах в любых отраслях промьшшенностн, где необходима блокировка перемещения пи- ноли в горизонтальном, вертикальном или в обоих направлениях одновременно. Целью изобретения является расширение технологических возможностей, т.е. увеличение точек позшЕКОнировзння за счет бло1 51ровкн перемещения пигз- ли механизмом блокировки ,вьтолье.нко- го в виде подпрх жиненчого паужк.ной 1 7 рычага 18. Одно плечо рыиага 18, выполненное в виде полоза иь) еюш;его с обеих сторон скосы, примыкает к боковой поверхности сборочного приспосоО-- ления на технологическом оборудооакии 22, в котором установлен упор 23, занимающий два возможных положеш- я относительно манипулятора. Другое плечо рычага 18 расположено по вертикали под гнездом на плакке 3, Рьгчаг 18 содержит дополнительное плечо 26. расположенное под гнездом 27 в 2, На планке 3 к ытоке 12 на расстоянии а вьтолнены гнезда. В гнезда могут вставляться упоры. выполненные в виде штифтов. Штоки приводов подпрзпки- нены вниз пружинамл. 6 ил. W f .
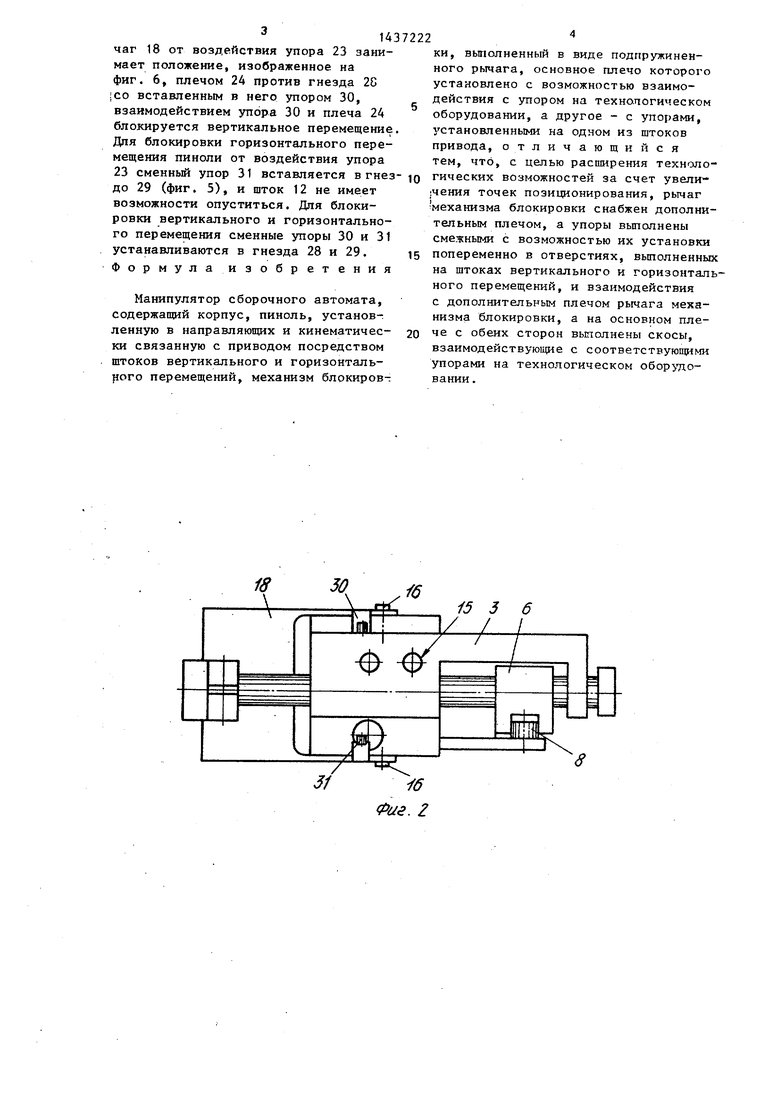
фиг. 2 - то же, вид сверху; на фиг.3- работает следующим образом.
20
30
35
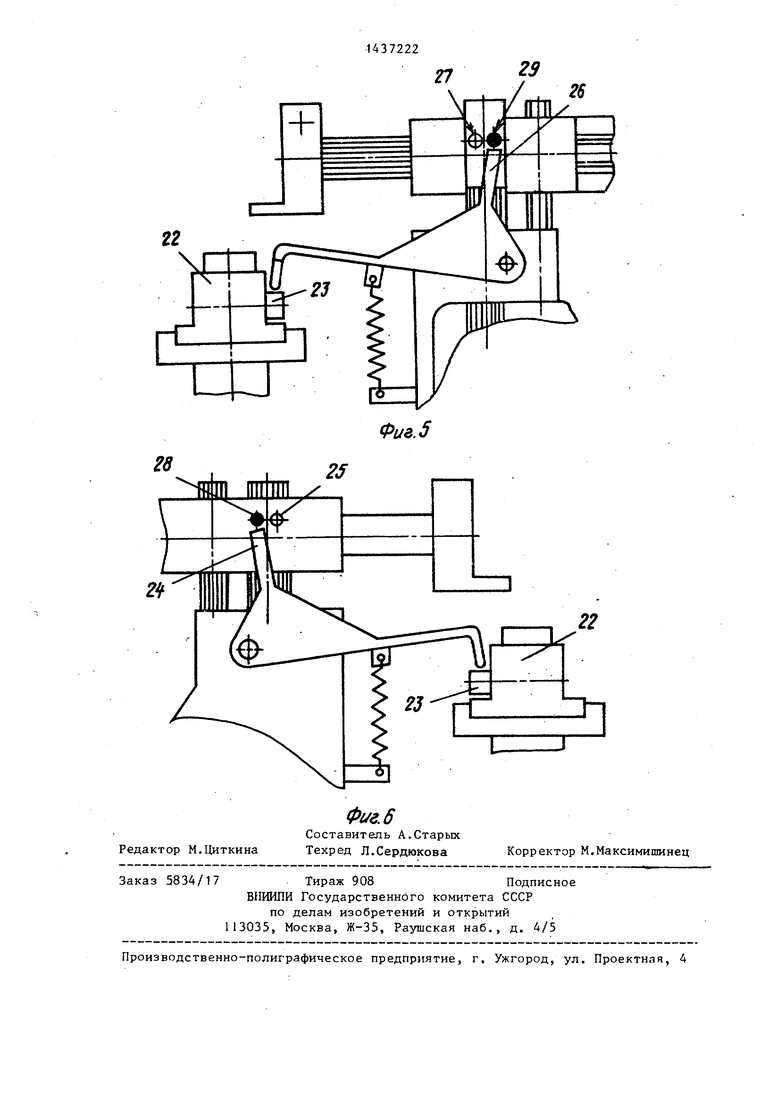
вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 и 6 - положение рычага механизма блокировки при воздействии упора на технологическом оборудовании.
Манип улятор сборочного автомата . содержит корпус 1, пиноль 2, установленную в направляющих втулках, запрессованных в планку 3. Для предотвращения поворота пиноли вокруг оси 25 она соединена планкой 4 с колонкой 5, установленной в направляющем отверстии в планке 3. На пиноли 2 закреплена планка 6 с вертикальным пазом 7, в котором расположен ролик 8 двуплечего рычага 9. Ролик 10, установлен- ньш на конце другого плеча рычага 9, расположен в пазу 11 штока 12 гори- зонтального перемещения пиноли. Шток 12 установлен в направляющих втулках в корпусе 1. Параллельно штоку 12 в направляющих втулках в корпусе 1 установлен шток 13 вертикального перемещения пиноли. На шток 13 напрессована планка 3 с направляющими для пи- ноли. Для предотвращения поворота шТ9ка 13 вокруг оси в корпус 1 запрессована колонка 14, расположенная в отверстии 15 в планке 3. На оси 16 установлен подпружиненный пружиной 17 рычаг 18 механизма блокировки. Одно 1глечо рычага 18, выполненное в виде псшоза 19 со скошенными концами 20 и 21, примыкает к боковой поверхности технологического оборудования, например 22, в котором установлен упор 23, занимаюпщй на предьщущик позициях сборочной линии два возможных положения: утопленное со стороны манипулятора (фиг. 1) и надвинутое к манипулятору (фиг. 5 и 6).. 55
Другое плечо 24 рычага 18 расположено по вертикали под гнездом 25 на планке 3. Рычаг содержит дополнитель40
45
50
При воздействии кулачков, женных на валу автоматическо ной линии (не показаны), на планка 3 с пинолью 2 перемещ вертикально вверх и опускает действием пружины 33. От воз кулачка на шток 12 пиноль 2 лик 10, рычаг 9, ролик 8, пл отводится назад и перемещает ред при снятии воздействия к усилием пружины 32. Закон дв пиноли опред&пяется профилем ков в соответствии с циклогр операций загрузки или выгруз
При необходимости блокиро позиции вертикального переме пиноли при утопленном упоре нологического оборудования 2 в гнездо 25 вставляется смен 30. Тогда рычаг 18 занимает ние, изображенное на фиг. 5, плечо 24 устанавливается про да 25 со вставленным в него 30 и при опускании штока 13 кой 3 пиноль 2 останавливает как упор 30 упирается в плеч рычаге 18.
При необходимости блокиро позиции горизонтального пере пиноли при утопленном упоре сменный упор 31 вставляется 27 на штоке 12. Тогда рычаг навливается плечом 26 против 27 с упором 31, при опускани 12 последний останавливается ние пиноли 2 вперед не проис При установке обоих упоров 3 блокируются оба перемещения и вперед.
При необходимости блокиро позиции вертикального переме ноли при вьщвинутом упоре 23 нологическом оборудовании 22 упор 30 вставляется в гнездо
работает следующим образом.
0
0
5
5 5
0
5
0
При воздействии кулачков, расположенных на валу автоматической сборочной линии (не показаны), на шток 13 планка 3 с пинолью 2 перемещается вертикально вверх и опускается под действием пружины 33. От воздействия кулачка на шток 12 пиноль 2 через ролик 10, рычаг 9, ролик 8, планку 6 отводится назад и перемещается вперед при снятии воздействия кулачка усилием пружины 32. Закон движения пиноли опред&пяется профилем кулачков в соответствии с циклограммой для операций загрузки или выгрузки.
При необходимости блокировки на позиции вертикального перемещения пиноли при утопленном упоре 23 технологического оборудования 22 (фиг.1) в гнездо 25 вставляется сменный упор 30. Тогда рычаг 18 занимает положение, изображенное на фиг. 5, т.е. плечо 24 устанавливается против гнезда 25 со вставленным в него упором 30 и при опускании штока 13 с планкой 3 пиноль 2 останавливается, так как упор 30 упирается в плечо 24 на рычаге 18.
При необходимости блокировки на позиции горизонтального перемещения пиноли при утопленном упоре (фиг.1) сменный упор 31 вставляется в гнездо 27 на штоке 12. Тогда рычаг 18 устанавливается плечом 26 против гнезда 27 с упором 31, при опускании штока 12 последний останавливается - движение пиноли 2 вперед не происходит. При установке обоих упоров 30 и 31 блокируются оба перемещения - вниз и вперед.
При необходимости блокировки на позиции вертикального перемещения пи- ноли при вьщвинутом упоре 23 на технологическом оборудовании 22 сменный упор 30 вставляется в гнездо 28.
чаг 18 от воздействия упора 23 занимает положение, изображенное на фиг. 6, плечом 24 против гнезда 28 .;со вставленным в него упором 30, взаимодействием упора 30 и плеча 24 блокируется вертикальное перемещение. Дпя блокировки горизонтального перемещения пиноли от воздействия упора 23 сменный упор 31 вставляется вгнез- до 29 (фиг. 5), и шток 12 не имеет возможности опуститься. Для блокировки вертикального и горизонтального перемещения сменные упоры 30 и 31 устанавливаются в гнезда 28 и 29.
Формула и зобр ет ения
Манипулятор сборочного автомата, содержащий корпус, пиноль, установ-г ленную в направляющих и кинематически связанную с приводом посредством штоков вертикального и горизонталь- рого перемещений, механизм блокировs
0
ки, выполненный в виде подпружиненного рычага, основное плечо которого установлено с возможностью взаимодействия с упором на технапогическом оборудовании, а другое - с упорами, установленньми на одном из штоков привода, отличающийся тем, что, с целью расширения техн зло- гических возможностей за счет увели- чения точек позиционирования, рьмаг механизма блокировки снабжен дополнительным плечом, а упоры выполнены смежными с возможностью их установки попеременно в отверстиях, выполненных на штоках вертикального и горизонтального перемещений, и взаимодействия с дополнительным плечом рычага механизма блокировки, а на основном плече с обеих сторон выполнены скосы, взаимодействующие с соответствующими упорами на технологическом оборудовании .
ta
SK
iJ
5
v.«..
h-
Го
М
, 1
Й-
a
r
f/
RT
Го
;ji№
.,„
J
22
27
Фив. 5
22
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
