Известны способы для управления сельсинным сипхронно-следящим электроприводом летучих ножниц непрерывного прокатного стана. Эти устройства имеют существенный недостаток, заключающийся в том, что из-за неоднозначности начальных условий процесса синхронизации в систем.е возникают значительные пepepeгyv иpoвaния. Вследствие этого время синхронизации возрастает. Еще большее затягивание процесса происходит в случае, когда начальный угол рассогласования сельсинов близок к 180° (так называемое положение «ложного нуля).
Предлагаемый способ управления отличается от известных тем, что для сокращения времени синхронизации положения нолчей относительно переднего конца проката, выходящего из последней клети, при больщих углах рассогласования производят предварительную синхронизацию ножниц увеличением или уменьшением (в зависимости от на-, чального взаимного положения роторов сельсина-датчика, связанного с задающим кинематическим устройством, и сельсина-приемника, свя: занного с ножницами) скорости электропривода путем соответствую- щего изменения уставки таходатчика при одновременном иск„тючении из работы на этот период сельсинной схемы, а окончательную синхронизацию по сельсинной схеме производят с малых углов рассогласования.
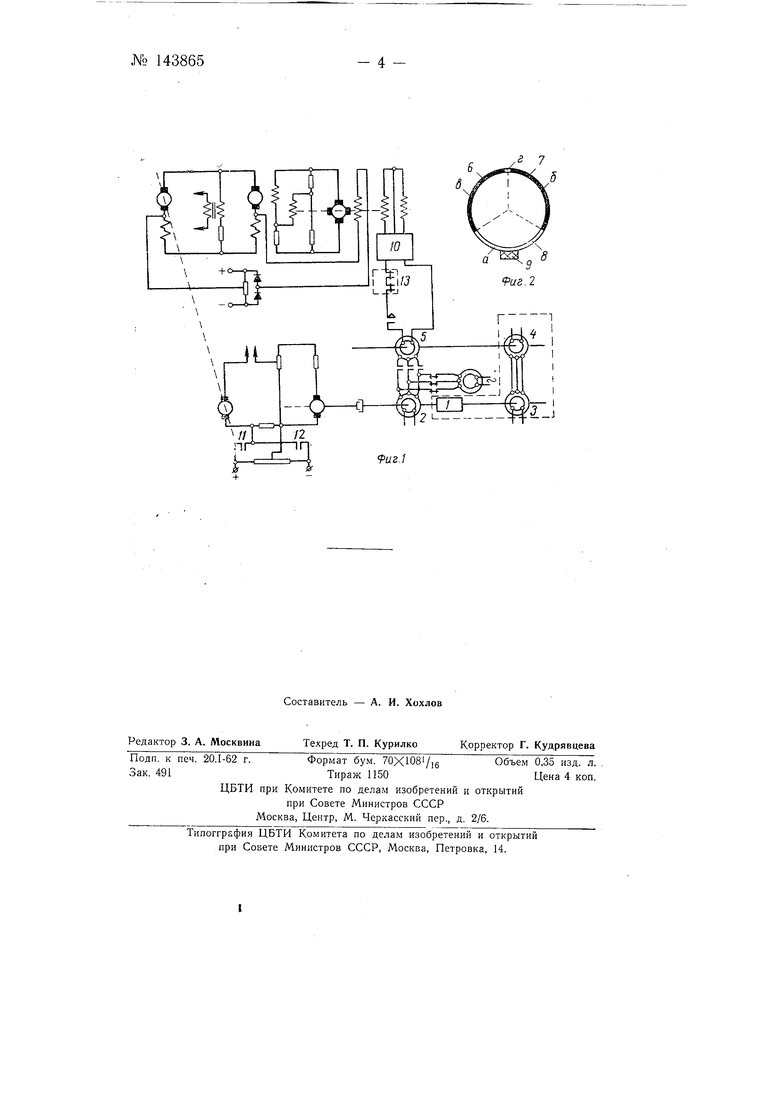
Устройство для осуществления описываемого способа отличается тем, что для определения взаимного положения роторов сельсинов применен путевой командоаппарат с двумя подвижными контактными системами. Первая из контактных систем, связанная непосредственно с сельсином-датчиком, выполнена в виде кольца с двумя проводящими и одним изолированным секторами. Вторая контактная система, свяКо 143865-- 2 занная через дополнительную пару индикаторных сельсинов с сельси ном-приемником, выполнена в виде траверсы со щеткой, скользящей по указанному кольцу, причем одии из проводящих секторов кольца включен в цепь катушки реле ускорения, а второй - в цепь катушки реле замедления, контактами которых производится изменение уставки таходатчика- На фиг. 1 доказана принципиальная схема устройства, реализующего описываемый способ; на фиг. 2 - выполнение командоаппарата.
По описываемому способу управления сельсинным синхронно-следящям электроприводом летучих ножниц непрерывного прокатного стана для сокращения времени синхронизации положения ножей относительно переднего конца проката, выходящего из стана, и исключения так называемого «ложного нуля сельсинной схемы, при больших углах рассогласования осуществляют предварительную синхронизацию ножниц, а сельсинную схему вводят в работу лишь при малых углах рассогласования. Предварительную синхронизацию производят изменением уставки скорости привода, задаваемой таходатчиком.
Уставка скорости увеличивается или уменьшается в зависимости от взаимного положения роторов сельсина-датчика, связанного с задающим кинематическим устройством, и сельсина-приемника, связанного с ножницами, в начале синхронизации.
Для определения взаимного положения роторов сельсинов в устройстве, реализующем описываемый способ, применен путевой командоаппарат / с двумя подвижными контактными системами, одна из которых связана с сельсином-датчиком 2, а вторая через дополнительную пару индикаторных сельсинов 5 и 4 - с сельсином-приемником 5. Первая из подвижных контактных систем командоаппарата выполнена в виде кольца с двумя 6 и 7 (фиг. 2) токопроводящими и одним 8 изолированным секторами, а вторая - в виде траверсы (не показана) со щеткой 9, вращающейся по указанному кольцу.
Сельсины фазируются таким образом, чтобы при синфазном положении роторов сельсина-датчика и сельсина-приемника щетка находилась в середине изолированного сектора.
В начале синхронизации сельсин-датчик 2 и сельсин-приемник 5 -могут находиться в любом относительном положении. При этом щетка 9 командоаппарата может соответственно занимать одно из четырех возможных положений.
В первом положении а щетка 9 находится на изолированном секторе. В .этом случае угол рассогласования сельсинов невелик и предварительная синхронизация с помощью командоаппарата не требуется. Выход сельсина-приемника 5 подключается к электрическому усилите;тю 10 (фиг. 1), и синхронизация осуществляется по сельсинной схеме.
Во втором положении б щетка 9 находится на проводящем секторе 7 (фиг. 2). В этом случае включается контакт // реле ускорения и происходит ускорение привода ножниц по тахометрической схеме. При этом щетка начинает двигаться быстрее кольца, так как ножницы ускоряются и сельсин-приемник вращается быстрее сельсина-датчика. Когда щетка перейдет на изолированный сектор, контакт // реле отключается и дальнейшая синхронизация осуществляется по сельсинной схеме.
В третьем положении в щетка 9 находится на проводящем секторе 6. В этом случае включается контакт 12 реле замедления и происходит замедление привода ножниц по тахометрической схеме. Далее 1фоцесс протекает аналогично описанному ранее.
В четвертом положении г. щетка одновременно перекрывает два проводящих сектора. В этом случае включаются одновременно оба реле и замыкаются контакты // и 12. Однако, схема их соединения выполнена таким образом, что реле замедления своим нормально-замкнутым контактом J3 отключает катушку реле ускорения - отдается предпочтение процессу замедления - и процесс синхронизации протекает далее аналогично описанному в третьем случаеОписываемый способ управления является новым и может найти полезное применение на практике.
Предмет изобретения
1.Способ управления сельсинным синхронно-следящим электроприводом летучих ножниц непрерывного прокатного стана, отличающийся тем, что, с целью сокращения времени синхронизации положения ножей относительно переднего конца проката, выходящего из последней клети, при больщих углах рассогласования, производят предварительную синхронизацию ножниц увеличением или уменьщением (в зависимости от начального взаимного положения роторов сельсинадатчика, связанного с задающим кинематическим устройством, и сельсипа-приемника, связанного с ножницами) скорости электропривог1а путем соответствующего изменения уставки таходатчика при одновременном исключении из работы на этот период сельсинной схемы, а окончательную синхронизацию по сельсинной схеме производят с малых углов рассогласования.
2.Устройство для осуществления способа по п. 1, отличающееся тем, что для определения взаимного положения роторов сельсиндд применен путевой командоаппарат с двумя подвижными контактными системами, первая из которых, связанная непосредственно с сельсиномдатчиком, выполнена в виде кольца с двумя проводящими и одням изолированным секторами, а вторая, связанная через дополнительную пару индикаторных сельсинов с сельсином-приемником, в виде траверсы со щеткой, скользящей по указанному кольцу, причем один из проводящих секторов кольпа включен в цепь катушки реле ускорения, а второй - в цепь катушки реле замедления, контактами которых производится изменение уставки таходатчика.
- 3 -№ 143865
г 7