4 00
со 4
00
Ц}
Изобр етение относится к исследованию упругих свойств узлов машин, в частности к способам определения жесткости элементов исполнительных механизмов, и предназначено для определения жесткости привода наведения высокоточного телескопа.
Цель изобретения - повьшение точности за счет учета люфта механизма,
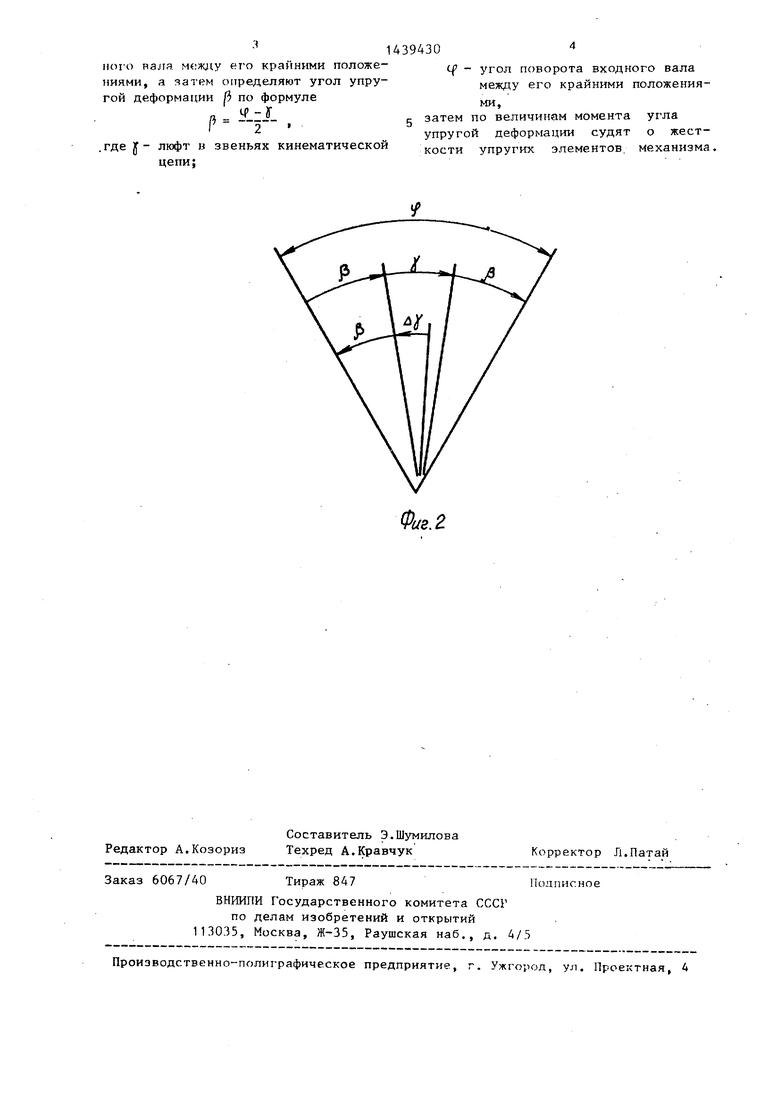
На фиг.1 представлена схема механизма для осуществления способа; на фиг.2 - схема , поясняющая определения угла упругой деформации.
Испытываемый исполнительный ме- ханизм состоит из редуктора 1 с коронной шестерней 2, находящейся в зацеплении с зубчатым ободом 3 на исполнительной оси 4 телескопа. Редуктор содержит элементы 5 с люфто- выбиранием и элементы 6 без люфтовы- бирания. Зацепление коронной шестерни 2 с ободом 3 также выполнено с лкхЬ- товыбиранием С входным валом 7 редуктора соединено стрелочное углоиз- мерительное устройство 8, а на исполнительной оси 4 установлена многогранная (16-24-гранная) призма 9, наблюдаемая: через теодолит 10.,
Способ осуществляется следзтощим образом.
Предварительно для элементов 6 (зубчатые зацепления, муфты и т.п., не имеющие устройств люфтовыбирания) экспериментальным путем определяются люфты. Определение производитсяс помощью технологических измерительных стендов,, обеспечивающих замеры люфтов .в соединениях известными методами. Фактическая величина люфта для каждо- го элемента заносится в паспорт. Затем по паспортным данным расчетным путем люфты всех элементов 6 приводят, с учетом передаточного отношения, к входному валу 7, суммируют и получают приведенный к входному валу люфт J . Затем медленно нагружают исполнительный механизм, прикладывая к входному валу 7 нарастаюгций крутящий момент до начала вращения исполни- тб:льной оси 4. Угол поворота входног вала определяется по углоизмеритель- ному устройству 8. Для редуктора привода телескопа с передаточным cooi-, ношением 500 тыс. и более при указанных люфте и упругой деформации, приведенных к исполнительной оси, угол поворота входного вала составит сотни г ралусов и для его точного измерения достаточно простого углоизмери тельного устройства. Начало движени исполнительной оси фиксируется с очень высокой точностью наблюдением за призмой 9 через теодолит 10.
При определении угла упругой деформации jb необходимо учитывать следующее (фиг.2). В начале вращения входной вал находится в промежуточном положении, для перевода из которого в одно из крайних положений (до начала вращения исполнительной оси) необходимо выбрать часть люфта А Л и упругую деформацию /i. При переброске вала из этого крайнего положения в другое крайнее сначала происходит раскрутка на угол упругой деформации р , затем выбор люфта и снова закрутка на угол /3 . Угол поворота Lf входного вала. 7 между крайними положениями можно выразить следующим образом:
+j4. . .
Тогда угол упругой деформации определится как I
2
Загтем по величине момента М, который необходимо приложить к входному валу для начала вращения исполнительной оси, и углу определяют жесткость упругих элементов исполнительного механизма
г - -М . . - /3
где С - жесткость;
М - крутящий момент;
3 - угол упругой деформации.
Формула изобретения
Способ определения жесткости упругих элементов исполнительного механизма, заключающийся в нагрзтаении входного вала исполнительного механизма и измерении деформации упругих элементов, отличающийся тем, что, с целью повышения точности перед нагружением вала расчетно-экс- периментальным путем определяют люфты в звеньях кинематической цепи и приводят их к входному валу механизма, затем нагружают входной вал нарастающим моментом до начала движени исполнительной оси сигнала в одну, потом в другую сторону, фиксируют величину момента и угол поворота входHoi O яаля его крайними положениями, а затем определяют угол упругой деформации /3 по формуле
д - -ll- Г 2
.где у- люфт в звеньях кинематической цепи;
с - угол поворота входного вала между его крайними положениями,
затем по величинам момента угла упругой деформации судят о жесткости упругих элементов, механизма,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сборки оси наведения телескопа | 1988 |
|
SU1545189A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| СПОСОБ ИСПЫТАНИЙ УПРАВЛЯЮЩЕГО СОПЛА С ЭЛАСТИЧНЫМ ОПОРНЫМ ШАРНИРОМ И ПРИВОДОМ С ОПРЕДЕЛЕНИЕМ УГЛА ПОВОРОТА ПОДВИЖНОЙ ЧАСТИ СОПЛА | 2011 |
|
RU2482458C1 |
| Способ статической балансировки изделия | 1988 |
|
SU1585697A1 |
| Устройство для определения жесткости упругих элементов | 1984 |
|
SU1247704A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ УПРУГОГО ЭЛЕМЕНТА | 2000 |
|
RU2194964C2 |
| Двухканальная следящая система | 1974 |
|
SU503205A1 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Способ сборки оптико-механического блока космического аппарата | 2015 |
|
RU2610919C1 |
Изобретение относится к исследованию упругих свойств узлов МИШИН, в частности к способам определения жесткости элементов исполнительных механизмов, и предназначено для определения жесткости привода наведения высокоточного телескопа. Цель изобрете ния - повышение точности за .счет учета люфта механизма. Способ определения жесткости упругих элементов исполнительного механизма заключается в том, что предварительно расчетцо-экспериментальным путем определяют люфты для элементов 6, и приводят их к входному валу механизма 7. Нагружают входной вал нараста- ющтнМ) моментом до начала движения исполнительной оси 4 сначала в одну, а затем в другую сторону, фиксируют величину момента и угол поворота входного вала между крайними его положениями, а затем определяют угол упругой деформации по формуле , ( О --у-; где |5 - угол упругдй деформации; Cf - угол поворота входного вала между крайними положениями; J - люфт в звеньях кинематической цепи, а по величине угла упругой деформации судят о жесткости упругих элементов механизма. 2 ил. S (Л
Фиг. г
| СПОСОБ ПРИРАБОТКИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115811C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения жесткости упру-гиХ элЕМЕНТОВ иСпОлНиТЕльНОгО MEXA-НизМА | 1979 |
|
SU823929A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
