Изобретение относится к робототехнике и может быть использовано для оснащения автоматических манипуляторов, работающих со стальными или чугунными деталями, лежащими в навале.
Цель изобретения - расширение технологических возможностей за счет обеспечения поштучного захвата из навала деталей преимущественно типа вал и повышение производительности.
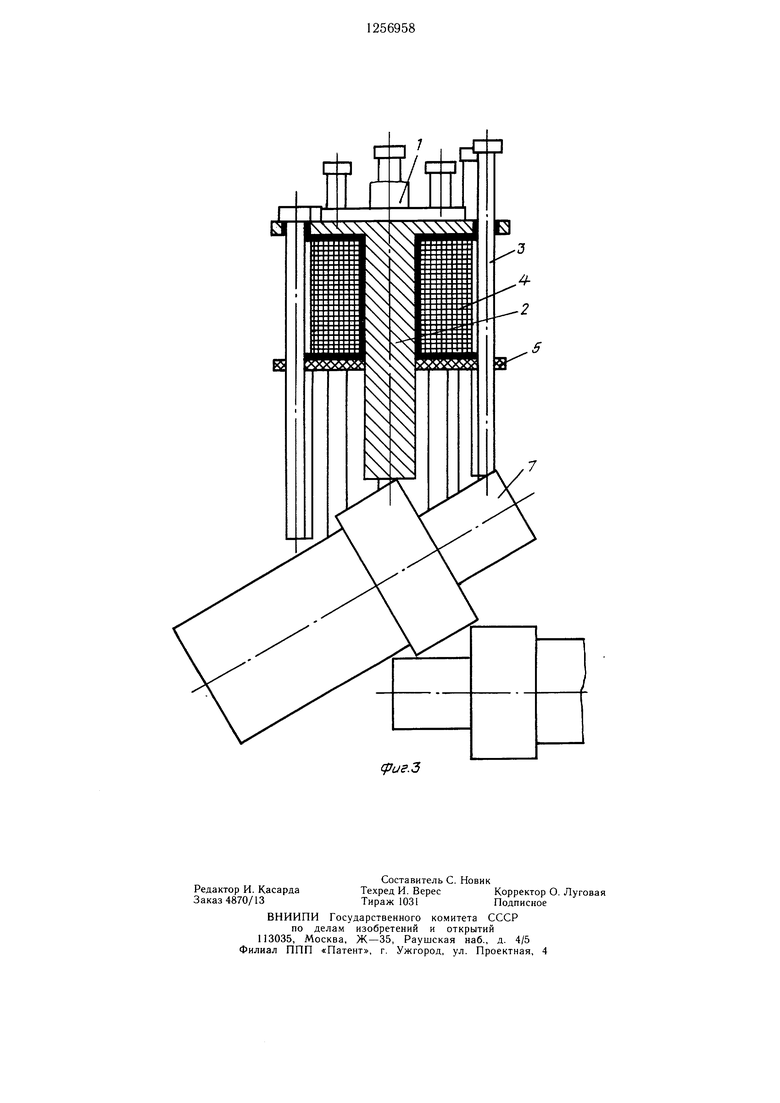
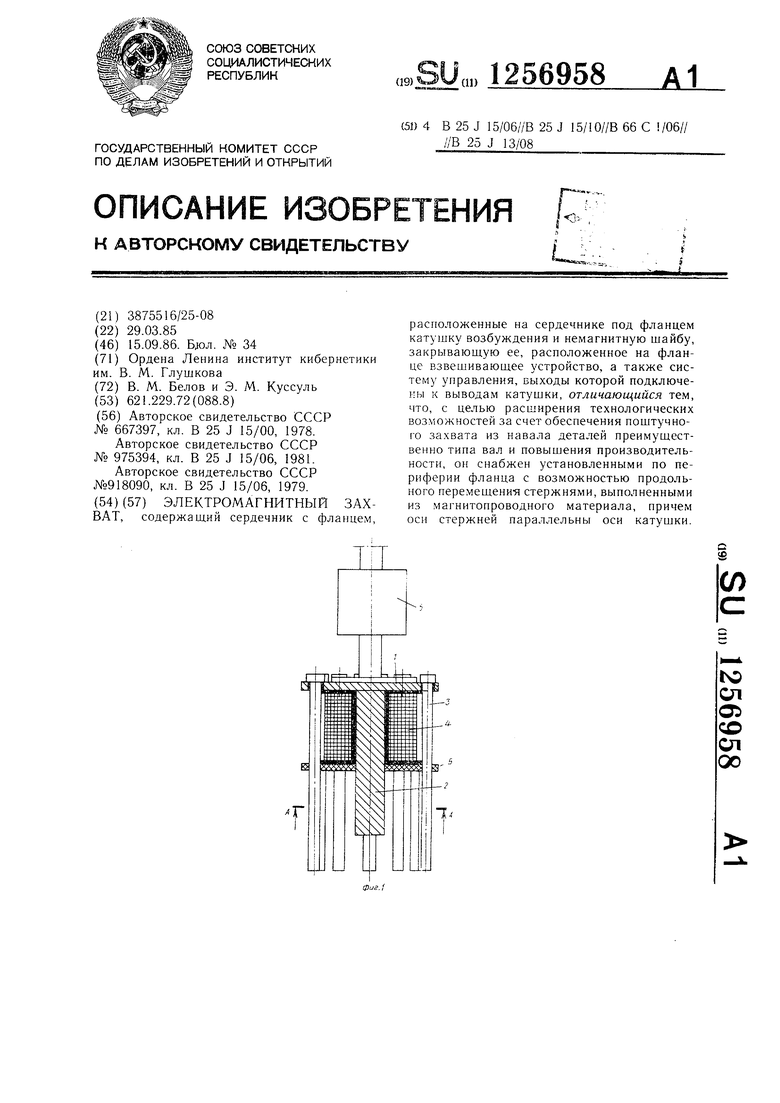
На фиг. 1 изображен захват, исходное положение; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - захват, рабочее положение.
Захват содержит фланец 1 с сердечником 2 в его нижней части, расположенные по периферии фланца стержни 3 и расположен- ную на сердечнике 2 катушку 4 возбуждения, закрытую снизу немагнитной шайбой 5. Сверху на фланце 1 установлено взвешивающее устройство 6. Концы катушки 4 возбуждения подключены к системе управления (не показана).
Сердечник 2 и стержни 3 выполнены из магнитопроводного материала. Оси стержней параллельны оси катушки. Стержни 3 установлены на фланце 1 с возможностью продольного перемещения и проходят через отверстия, выполненные в шайбе 5. В верхней части стержни 3 имеют фланцы, позволяющие им висеть на фланце 1.
Захват работает следующим образом.
Захват опускают, например, автоматическим манипулятором, на детали, лежащие в
0
5
навале до тех пор, пока сердечник 2 не коснется детали (этот момент определяется по показанию взвешивающего устройства 6). При этом подвижные стержни 3, упираясь в деталь 7, уходят вверх по отношению к сердечнику и одновременно охватывают контур детали, как бы отделяя ее от других деталей в навале. После этого в катушку 4 возбуждения подается ток и захват поднимается. При этом захваченная деталь 7 и подвижные стержни 3 могут занять новое положение в зависимости от положения центра тяжести детали 7 и величины свободного хода стержней. Поскольку магнитное поле оказывается замкнутым через сердечник 2, стержни 3 и деталь 7, то остальные детали не прилипают к захвату. Тем самым осуществляется поштучная выборка деталей 7 из навала.
Захват может поднимать и более одной детали в том случае, когда сердечник 2 случайно попадет на границу деталей. Сброс лишних деталей происходит за счет контроля показаний взвешивающего устройства 6, связанного с системой управления, по сигналам которой изменяется величина тока, протекающего через катушку 4.
В данном случае для уменьшения размеров рабочего поля концы подвижных стержней 3 загнуты внутрь. При этом стержни целесообразно делать прямоугольного сечения. Шайба 5 выполнена из текстолита.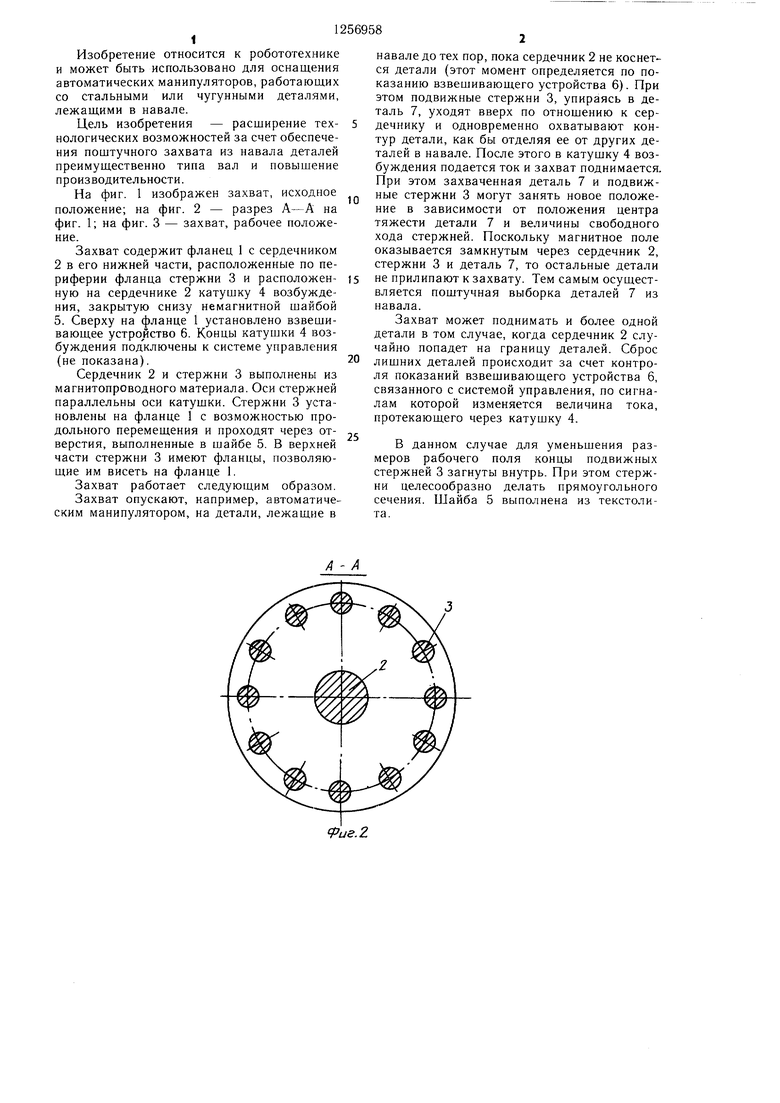
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| Горелка для сварки магнитоуправляемой дугой | 1991 |
|
SU1796374A1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Электромагнитный захват | 1986 |
|
SU1440708A1 |
| Устройство для ориентации и поштучной выдачи | 1985 |
|
SU1270082A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Устройство для поштучной выдачи плоских деталей с отверстиями | 1989 |
|
SU1708478A1 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| Электромагнитный поворотный захват манипулятора для ферромагнитных деталей | 1978 |
|
SU747716A1 |
ие.2
сриг.З
Редактор И. Касарда Заказ 4870/13
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Составитель С. Новик
Техред И. ВересКорректор О. Луговая
Тираж 1031Подписное
| Захватная головка манипулятора | 1978 |
|
SU667397A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Электромагнитный захват | 1981 |
|
SU975394A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
