4
Фиг.1
00 ,4:
СП
Изобретение относится к захватным устройствам для длинномерных цилиндрических изделий.
Целью изобретения является упрощение конструкции захватного устройства.
На фиг. 1 изображено захватное устройство для длинномерных цилиндрических изделий; на фиг. 2 - то же, вид сверху.
Захватное устройство для длинномерных цилиндрических изделий содержит траверсу 1 и раму 2, перемещающихся друг относительно друга по направляющим 3 и связанных между собой механизмом 4 фиксации. Траверса I навещивается на подъемную машину. В направляющих 3 рамы 2 расположены с возможностью перемещения каретки 5 с Г-образными захватными органами 6, оборудованные роликом 7 с вертикальной осью вращения и роликов 8 с осью вращения, параллельно продольной оси захватываемого длинномерного цилиндрического
до срабатывания механизма 4 фиксации, который опять свяжет траверсу 1 с рамой 2. При этом натяжение гибких элементов 9 ослабевает и под воздействием сжатых пружин 12 каретки с Г-образными захватными
5 органами 6 выдвигаются в противоположные стороны, обеспечивая тем самым освобождение трубы.
Для захвата двух труб устройство ориентируется по отношению к ним так, что
10 его продольная плоскость симметрии расположена между захватываемыми трубами. При этом средняя пара Г-образных захватных органов 6 расположена в ложбинке между трубами. При подъеме траверсы 1 она удаляется от рамы 2 и посредством
гибких элементов 9 и балансиров 10 и гибких тяг 11 вдвигает Г-образные захватные органы 6 внутрь рамы 2, сжимая пружины 12, обеспечивая тем самым захват двух труб крайними парами захватных орными захватными органами 6 с помощью гибких элементов 9, балансиров 10 и гибких тяг 11 соединены с траверсой 1 и подпружинены пружинами 12. В нижней части рамы 2 смонтированы опорные катки 13.
Устройство работает следующим образом.
25
изделия - трубы. Каретка 5 с Г-образ- 20 ганов 6. Средняя пара захватных органов 6
работает при этом вхолостую. При опускании двух труб диаметром 120 мм в полувагон опирание их в Г-образные захватные органы 6 через ролики 7 и 8 обеспечивает свободное вращение труб навстречу друг другу от воздействия сил трения труб о борта полувагона, что в свою очередь обеспечивает сохранность антикоррозийного покрытия и уменьшение боковых горизонтальных нагрузок на каретки с захватными органами 6.
При захвате двух и более труб разной длины перемещение кареток с захватными органами 6 до торцов более коротких труб обеспечивается при дальнейшем подъеме траверсы 1 поворотом балансиров 10 вокруг их средних шарниров.
30
35
40
В исходном положении, перед захватом труб, траверса 1 расположена вблизи по отношению к раме 2 и удерживается в этом положении механизмом 4 фиксации. Каретки 5 с Г-образными захватными органами 6 под воздействием сжатых пружин 12 выдвинуты в противоположные стороны. Для захвата одной трубы устройство ориентируется по отношению к ней так, что его продольная плоскость симметрии совпадает с вертикальной продольной плоскостью симметрии захватываемой трубы. При этом крайние пары Г-образных захватных органов 6 располагаются в ложбинке между трубами. После установки устройства на захватываемую трубу и срабатывания механизма 4 фиксации подъемной машиной производится подъем траверсы 1, которая удаляется от рамы 2 и посредством гибких элементов 9, балансиров 10 и гибких тяг 11 воздействует на каретки 5 с Г-образными захватными органами 6, вдвигая их по направляющим внутрь рамы 2, сжимая пружины 12. При этом Г-образные захватные органы 6 приближаются к торцам трубы, обеспечивая ее захват средней парой. Край- Q ние пары захватных органов 6 при этом работают вхолостую. Если рама 2 установлена на захватываемую трубу с продольным смещением ее центра по отношению к центру трубы, то при захвате устройство переместится вдоль трубы на опорных кат- 55 ках 13 до совмещения их центров. После укладки трубы в щтабель и дальнейшем опускании траверсы 1 она приближается к раме 2
45
Нагрузка от веса труб передается через Г-образные захватные органы 6, гибкие элементы 9, балансиры 10 и гибкие тяги 11 на траверсу 1. Рама 2 непосредственной нагрузки от веса труб не воспринимает, а гибкие элементы 9 и траверса 1 работают на растяжение. Но так как длина балансиров 10 и Г-образных захватных органов 6, работающих на изгиб, небольщая, соизмерима с диаметром захватываемых труб, то масса этих элементов небольшая. Это обеспечивает снижение массы устройства.
Формула изобретения t
Захватное устройство для длинномерных цилиндрических изделий, содержащее раму с направляющими, в которых установлены подпружиненные относительно рамы в горизонтальной плоскости тележки с захватными органами, траверсу, присоединяемую к крюку подъемной мащины и связанную с рамой механизмом фиксации, и кинематическую связь захватных органов с траверсой, вклюдо срабатывания механизма 4 фиксации, который опять свяжет траверсу 1 с рамой 2. При этом натяжение гибких элементов 9 ослабевает и под воздействием сжатых пружин 12 каретки с Г-образными захватными
органами 6 выдвигаются в противоположные стороны, обеспечивая тем самым освобождение трубы.
Для захвата двух труб устройство ориентируется по отношению к ним так, что
его продольная плоскость симметрии расположена между захватываемыми трубами. При этом средняя пара Г-образных захватных органов 6 расположена в ложбинке между трубами. При подъеме траверсы 1 она удаляется от рамы 2 и посредством
гибких элементов 9 и балансиров 10 и гибких тяг 11 вдвигает Г-образные захватные органы 6 внутрь рамы 2, сжимая пружины 12, обеспечивая тем самым захват двух труб крайними парами захватных органов 6. Средняя пара захватных органов 6
0
Q 5
5
Нагрузка от веса труб передается через Г-образные захватные органы 6, гибкие элементы 9, балансиры 10 и гибкие тяги 11 на траверсу 1. Рама 2 непосредственной нагрузки от веса труб не воспринимает, а гибкие элементы 9 и траверса 1 работают на растяжение. Но так как длина балансиров 10 и Г-образных захватных органов 6, работающих на изгиб, небольщая, соизмерима с диаметром захватываемых труб, то масса этих элементов небольшая. Это обеспечивает снижение массы устройства.
Формула изобретения t
Захватное устройство для длинномерных цилиндрических изделий, содержащее раму с направляющими, в которых установлены подпружиненные относительно рамы в горизонтальной плоскости тележки с захватными органами, траверсу, присоединяемую к крюку подъемной мащины и связанную с рамой механизмом фиксации, и кинематическую связь захватных органов с траверсой, включающую гибкие тяги, одни концы которых связаны с тележками захватных органов, и приспособление для установки захватных органов, отличающееся тем, что, с целью упрощения конструкции, приспособление для установки захватных органов выполнено в виде
балансиров, к средней части и к концам которых шарнирно прикреплены другие концы гибких тяг, а устройство снабжено гибкими элементами, шарнирно прикрепленными нижними концами к осям средних шарниров, а верхними к концам траверсы.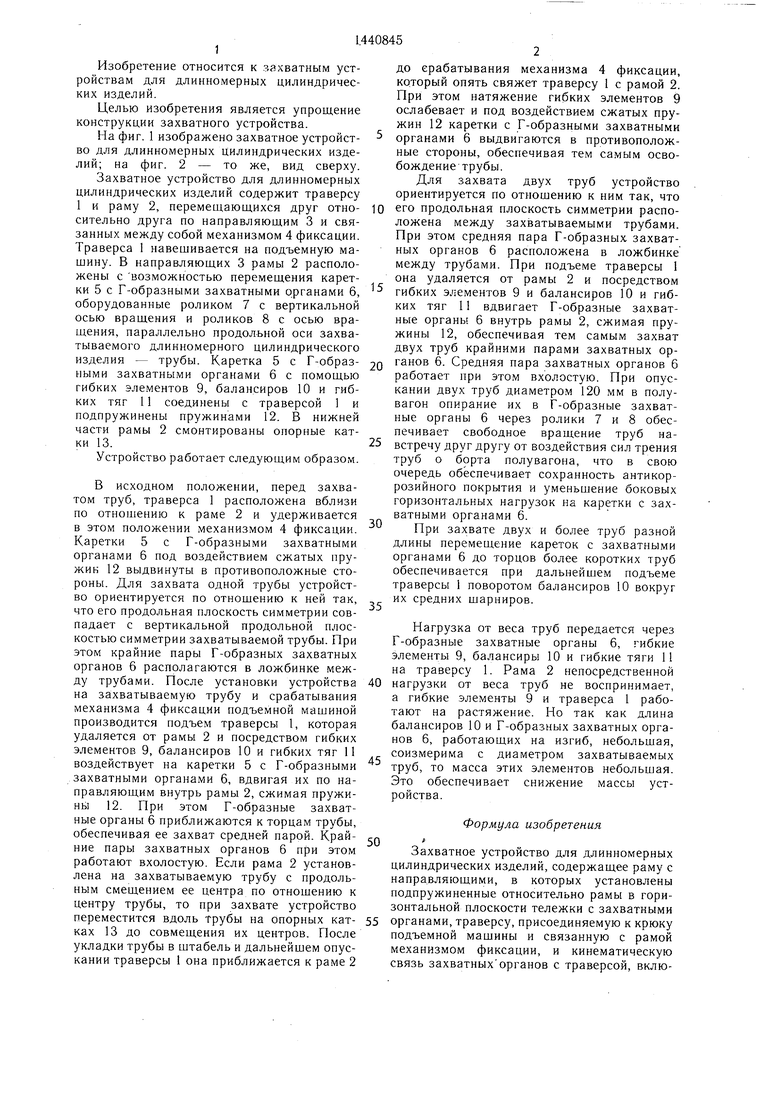
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Захватное устройство для длинномерных изделий | 1988 |
|
SU1731718A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Устройство для порядного захвата труб | 1987 |
|
SU1523517A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Автоматический захват для пакетов штучных грузов | 1980 |
|
SU878722A1 |
| Грузозахватное устройство | 1987 |
|
SU1463693A1 |
| Захватное устройство | 1975 |
|
SU586084A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ДЕМПФЕРНЫМ СЦЕПНЫМ УСТРОЙСТВОМ | 2014 |
|
RU2580886C1 |
| Захватное устройство для длинномерных грузов | 1971 |
|
SU461886A1 |
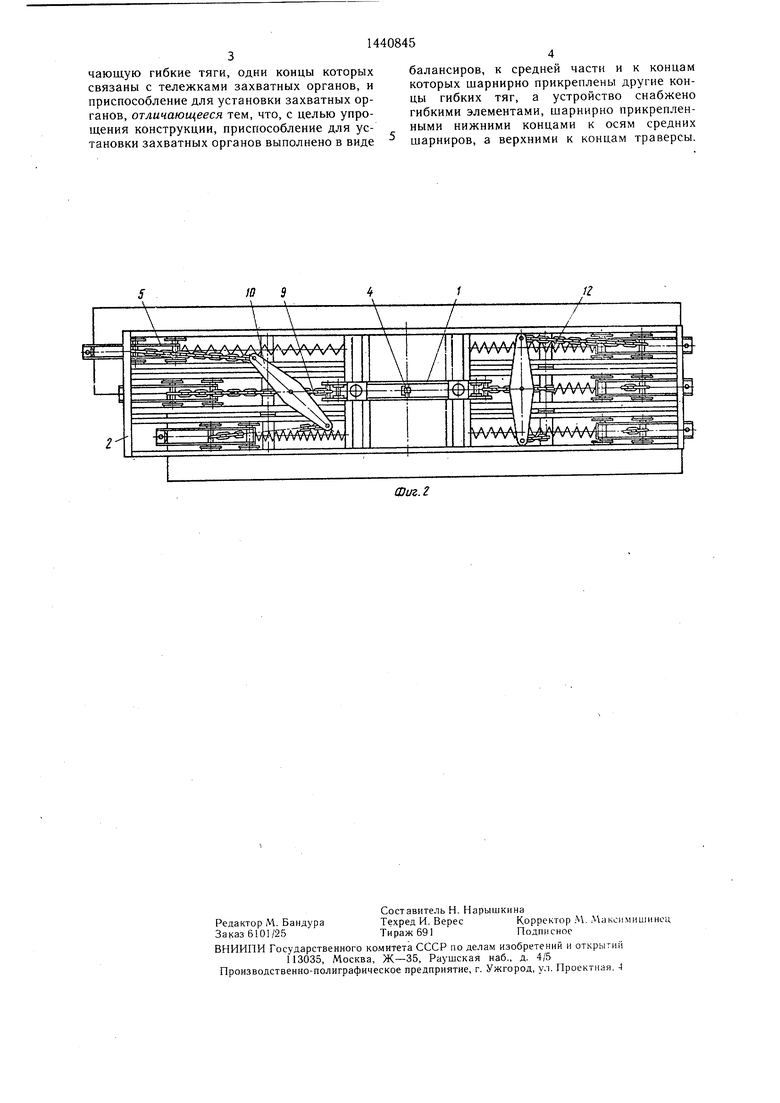
Изобретение относится к подъе.мно- транспортному оборудованию. Цель изобретения - упрощение конструкции. Захватное устройство для длинномерных цилиндрических изделий содержит траверсу 1, раму 2 с захватными органами 6, балансиры 10, гибкие элементы 9 и гибкие тяги 11. При установке устройства на изделия разной длины за счет балансиров 10 происходит самоустановка захватных органов 6. 2 ил.
| Захватное устройство для труб | 1982 |
|
SU1178680A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
