1 - 11 Изобретение относится к средствам управления транспортными устройствами, преимущественно ленточными конвейерами, транспортирующих насыпные грузы в горнодобывающей, металлургической и строительной промышленности ,
Известен способ управления ленточным .конвейером путем изменения скорости движения ленты конвейера в зависимости от массы поступающего на нее материала lj .
Недостатком данного способа является большой износ ленты и механической части конвейера из-за больших динамических нагрузок при резком нарастании грузопотока. Для снижения динамических нагрузок уменьшают диапазон регулирования скорости до диапазона, в котором нарастание грузопотока и разгон конвейера происходит с допустимым для конвейера ускорением. Это приводит к резкому снижению эффективности управления конвейером.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является способ управления ленточным конвейером, включающий регулирование скорости движения ленты Ё зависимости от массы поступающего из блока загрузки на нее материала 2j
Однако известный способ управления ленточным конвейером обладает рядом недостатков: способ применим только для систем, у которых материал из блока загрузки (рудоподготовки) поступает на ленточный конвейер из бункера. При поступлении материала с различными физико-механическими свойствами на детерминированную составляющую устанавливающегося процесса истечения материала из бункера накладывается случайная составляющая, в результате чего интенсивность грузопотока на выходе изменяется, что обуславливает сложность применения данного способа управления конвейером. При поступления материала на конвейерную ленту порциями из блока загруз ки (рудоподготовки). с резким нарастанием грузопотока известньй способ управления не обеспечивает нормальный режим работы конвейера из-за недопустимых ускорений ленты. Это приводит к ударным нагрузкам в механической и электрической системе кон732
вейера, к просыпи материала в месте загрузки ленты.
Целью изобретения является уменьшение динамических нагрузок при разгоне ленты.
Указанная цель достигается тем, что согласно способу управления ленточным конвейером, включающем регулирование скорости движения ленты в Зависимости от массы поступающего из /5лока загрузки на нее материала, коятролируют момент подачи материала в блок загрузки к моменту резкого арастания грузопотока на выходе из -лока загрузки учитывают время прохой тения материала через блок загрузки и разгоняют ленту до номинальной скорости, а по окончании разгона ленты управление конвейером осуществляют в зависимости от поступающей массы материалаиз блока загрузки.
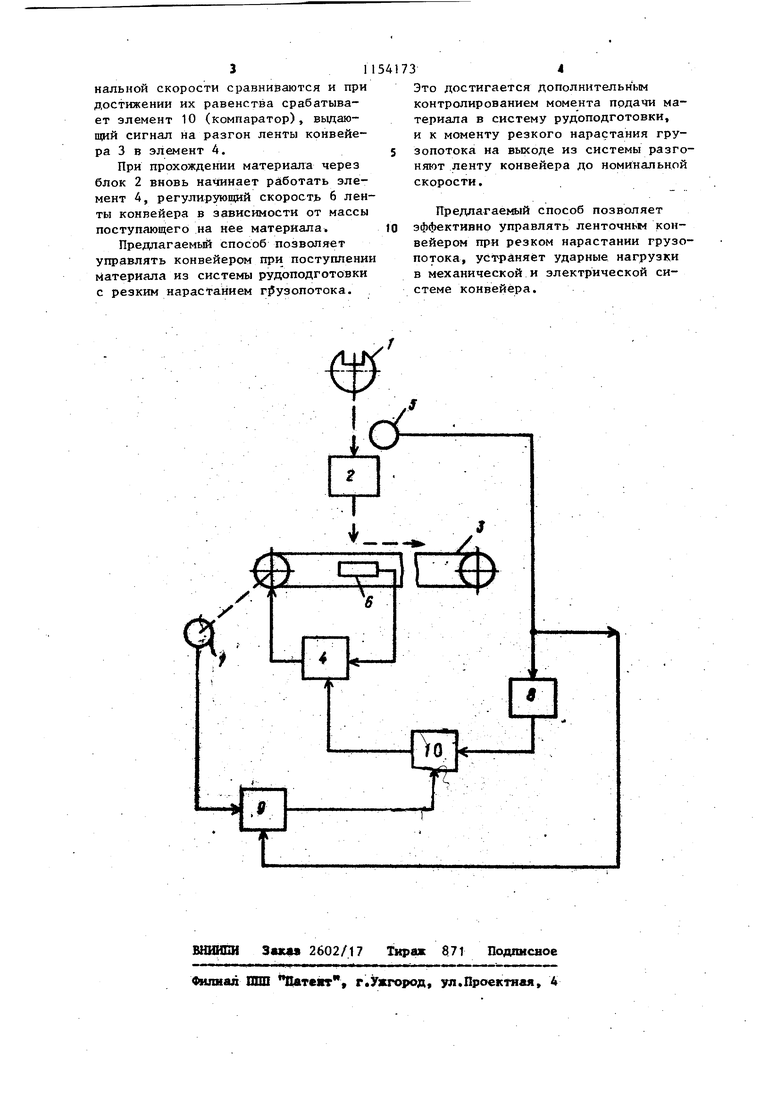
На -грртеже представлена блок-схема устройства, реализующего способ управления конвейером.
Способ управления ленточным конвейером реализуется устройством, включаюрдим разгрузочное устройство блок 2 загрузки (систему рудоподготовки) , конвейер 3, устройство 4 регулирования скорости ленты конвейера, датчик 5 наличия материала, весоизмерительное устройство 6, датчик 7 скорости ленты, блок 8 задержки, блок 9 указания времени разгона ленты конвейера, компаратор 10.
Способ управления осуществляют следзлоЕчим образом.
С разгрузочного устройства 1 материал поступает порциями в блок 2 загрузки (систему рудоподготовки , После прохоадения которого поступает на конвейер 3 с большей скоростью нарастания гру-зоп тока. Начало поступления материала в блок 2 фиксируется датчиком 5 наличия материала, который подает сигнал на начало отсчета времени в блок 8 задержки, указывающий на момент окончания прохождения материала через блок 2. Одновременно по сигналу от датчика 5 начинает работать элемент 9, указывающий время разгона конвейера 3 с номинальным ускорением от текущей скорости, которая задается датчиком 7, до номинальной.
Время отсчета окончания прохождения материала через блок 2 и время разгона ленты конвейера 3 до номи3 n
нальной скорости сравниваются и при достижении их равенства срабатывает элемент 10 (компаратор), выдающий сигнал на разгон ленты конвейера 3 в элемент 4.
При прохождении материала через блок 2 вновь начинает работать элемент 4, регулирующий скорость 6 ленты конвейера в зависимости от массы поступающего на нее материала.
Предлагаемый способ позволяет управлять конвейером при поступлении материала из системы рудоподготовки с резким нарастанием г 5узопотока.
41734
Это достигается дополнительньм контролированием момента подачи материала в систему рудоподготовки, и к моменту резкого нарастания гру5 зопотока на выходе из системы разгоняют ленту конвейера до номинальной скорости.
Предлагаемый способ позволяет JO эффективно управлять ленточньм конвейером при резком нарастании грузопотока, уст раняёт ударные нагрузки в механической и электрической системе конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ленточным конвейером | 1980 |
|
SU910508A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ЛЕНТЫ КОНВЕЙЕРА | 2015 |
|
RU2600404C1 |
| Загрузочное устройство для конвейеров | 1978 |
|
SU781152A1 |
| Устройство для управления загрузкой ленточного конвейера | 1983 |
|
SU1090644A1 |
| Ленточный конвейер | 1979 |
|
SU806556A1 |
| Устройство для управления приводом конвейерной установки | 1984 |
|
SU1191391A1 |
| Способ управления ленточным конвейером | 1976 |
|
SU645911A1 |
| Способ управления конвейерной линией | 1982 |
|
SU1500583A1 |
| Способ управления загрузкой ленточного конвейера | 1980 |
|
SU908701A1 |
| Способ управления ленточным конвейером | 1988 |
|
SU1666413A1 |
СПОСОБ УПРАВЛЕНИЯ ЛЕНТОЧНЫМ КОНВЕЙЕРОМ, включающий регулирование скорости движения ленты в зависимости от массы поступающего из блока загрузки на нее материала, отличающийся тем, что, с целью уменьшения динамических нагрузок при разгоне ленты, контролируют момент подачи материала в блок загрузки и к моменту резкого нарастания грузопотока на выходе из блока загрузки учитывают время прохождения материала через блок загрузки и разгоняют ленту до номинальной скорости, а по окончании разгона ленты управление конвейером осуществляют в, зависимости от поступающей массы материала из блока загрузки.
-- /
.f -.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод конвейерного комплекса | 1973 |
|
SU610752A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ и башня с насадкой для охлаждения хлора при получении его электролизом | 1935 |
|
SU45911A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
