О) 00
9) Изобретение относится к станкостроению, в частности к захватным приспособлениям промьшленных роботов Известен схват, содержащий корпус в котором размещены две группы зажимных губок с синхронизирующим элементом, кинематически связанным с приводом l , Недостатком известного схвата является низкая надежность работы. Цель изобретения - повышение надежности работы. Цель достигается тем, что , содержащий корпус, в котором размеще ны две группы зажимных губок с синхронизируюц м элементам, кинематически связанным с приводом, выполнен ным в виде силового цилиндра,снабже многоплечими рычагами по числу губок схвата, а синхронизирующий элемент выполнен в виде связанной с приводом тяги с пазами и двух центральных втулок, причем один из рычагов каждой группы зажимных губок снабжен дополнительным плечом, разме щенным в пазу тяги с возможностью свободного хода, а все остальные плечи каждого многоплечего .рычага предназначены для взаимодействия с пазами центральных втулок и зажимны губок, подпружиненных относительно корпуса, кроме того, тяга размещена перпендикулярно оси схвата, а центральные втулки вдоль его оси, при этом привод выполнен трехпозиционным,; На фиг, 1 схематически представл предлагаемый схват, разрез; на фиг, 2 - разрез А-А на фиг. 1, Схват содержит корпус 1, установ ленные на его торцах два комплекта зажимных губок 2, расположенньк так образом, что один комплект губок см щен относительно Другого комплекта плоскости расположения губок на 60 две центральных втулки 3, два комп16 лекта многоплечих рычагов 4 и 5, установленных на закрепленных в корпусе осях 6, причем рычаги 4 снабжены тремя плечами, а рычаги 5 - четырьмя плечами. Кроме того, в корпусе захвата установлены пружины 7, одним торцом взаимодействующие через планку 8 с плечом рычагов 4 и 5, а другим торцом закреплены в крышках 9, а также снабженная пазами тяга 10, связанная с приводом-(не показан), с помощью которого она может перемещаться в направлении, перпендикулярном оси втулок 3. Схват работает следующим образом. Пусть ра-змещенный в руке робота и имеющий три фиксированных положения привод, например гидроцилиндр, пере-мещает тягу 10 в среднее положение. В этом положении тяга 10, пружины 7 через планки 8 воздействуют на соответствующие плечи рычагов 4 и 5, которые другими плечами взаимодействуют с пазами соответствующих губок 2 и втулок 3. В результате этого губки 2 радиально перемещены к центру схвата и зажимают оба изделия, находящиеся с правой .и с левой стороны схвата. При этом дополнительные четвертые плечи рычагов 5 соприкасаются со стенками пазов тяги 10. При подъеме тяги 10 стенка нажимает на дополнительное четвертое плечо правого рычага 5 и он., поворачиваясь вокруг оси, отводит расположенные в правом торце схвата губки 2 от изделия, удерживаемого с этой стороны. Благодаря взаимодействию одного иг плеч всех трех рычагов 4 и 5 с пазом втулки 3.обеспечивается одновременность разведения губок 2. При оцускании тяги 10 аналогичным образом производится разжим изделия, находящегося с левой стороны схвата. Предлагаемый двухстороиний схват характеризуется надежностью работы.
СП
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1444142A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |

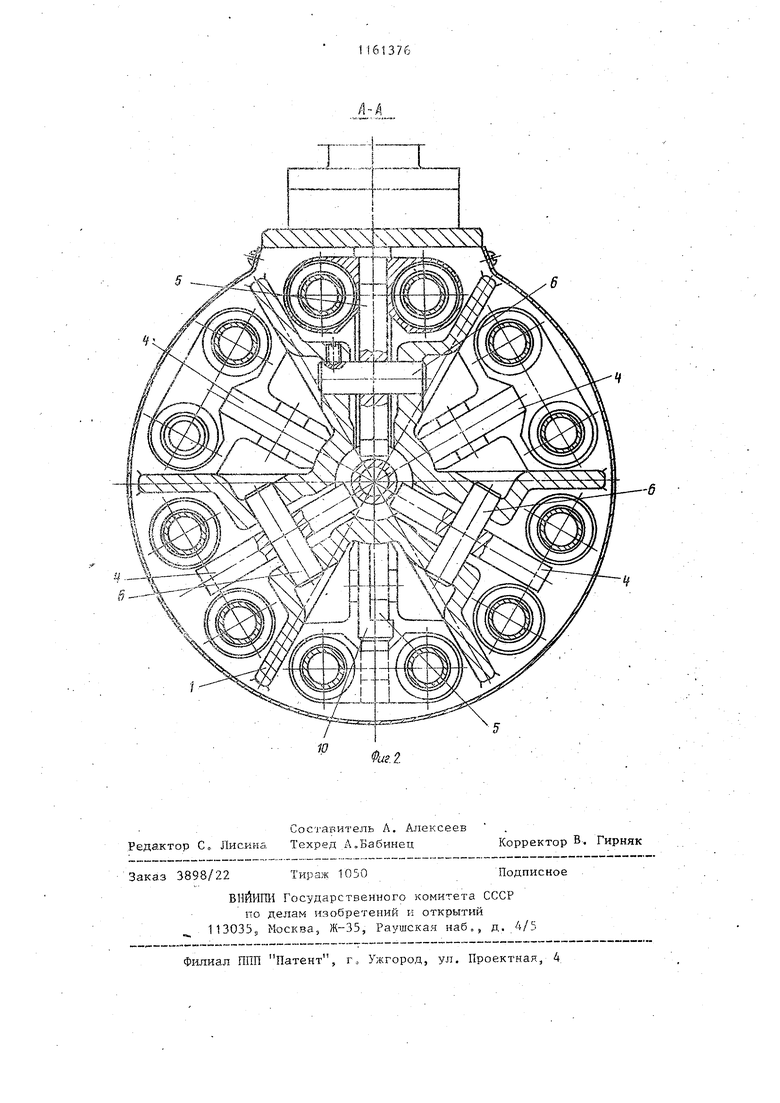
СХВАТ, содержащий корпус, в котором размещены две группы зажимных губок с синхронизирующим элементом, кинематически связанным с приводом, выполненным в виде силового цилиндра, отличающийся тем, что, с целью повьшения надежности работы, он снабжен многопле чими рычагами по числу зажимных губ.ок схвата, а синхронизируищий элемент выполнен в виде связанной с приводом тяги с пазами и двух центральных втулок, причем один из рычагов каждой группы зажимных губок снабжен дополнительным плечом, размещенным в пазу тяги с возможностью свободного хода, а все остальные плечи каждого многоплечего рычага предназначены для взаимодействия с пазами центральных втулок и зажимных губок, подпружиненных относительно корпуса, кроме того, тяга размещена перпендикулярно оси охвата, « а центральные втулки - вдоль его СО оси, при этом привод выполнен трехс позиционным.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
