сл
сл
со СП
со
Фи8.2
7 8
14)
Изобретение относится к машиностроению, может быть использовано в конструкциях захватных органов манипуляторов и является усовершенствованием изобретения по авт. св. № 1119843.
Целью изобретения является повышение надежности схвата за счет контроля износа губок.
На фиг. 1 показан схват манипулятора; на фиг. 2 - узел I на фиг. 1.
Схват манипулятора содержит корпус 1, рычаги пальцев 2, на концах которых имеюткоторые воспринимают это усилие, передают деформацию наклеенным на них датчикам контроля прогиба. Сопротивление датчиков изменяется и посредством электропроводников 9 регистрируется системой контроля сигналов (не показана) которая может быть выполнена по известной полумостовой или мостовой схеме при выполнении .датчиков контроля прогиба электротензометричес- кими. Пластины 6 закреплены по периметру 10 в герметизирующих прокладках 5. При достижении прогиба профилированных пластин 4 большего, чем прогиб, обеспечивающий
ся губки 3, которые состоят из параллельно безопасность работы схвата манипулятора расположенных профилированных пластин(напряжений датчиков контроля прогиба
4, имеющих по периметру герметизирующие 5 больше предельно заданных), происходит по- прокладки 5 с закрепленными в них плоски- лача сигнала об опасности или остановка ма- ми пластинами 6, имеющими пазы 7 под нипулятора. При этом оператор разгермети- профиль пластин 4 губок 3. Пространство зирует пространство под наружной профили- между прокладками 5 вакуумировано. На рованной пластиной 4, давление с обеих сто- поверхности пластин 6 установлены датчики рон которой выравнивается, и она вместе с 8 контроля прогиба профилированных плас- 20 гемметизирующей прокладкой 5 и пластиной тин 4, имеющие электропроводники 9, сое- 6 отпадает от пакета пластин, освобождая
неизношенную поверхность следующей в пакете профилированной пластины.
При использовании всех пластин на ра- 25 бочую поверхность рычагов 2 устанавливается основание 11 с пакетом пластин посредстдиняющие их и систему контроля сигналов. Нижняя пластина 10 крепится к основанию 11 губки 3 винтами 12.
Схват работает следующим образом.
Под действием привода (не показан) паЛьцы 2, двигаясь в корпусе 1, зажимают деталь губками 3. В процессе работы поверхности профилированных пластин 4, по которым происходит контакт с деталью, истираются, что приводит к потере их жесткости.
Происходит деформация поверхности наружных профилированных пластин 4 под действием усилия привода. Эта деформация воспринимается посредством силового контакта пластинами 6 (для обеспечения комвом винтов 12.
Формула изобретения
30 Схват манипулятора по авт. св. № 1119843, отличающийся тем, что, с целью повышения надежности, он снабжен плоскими пластинами с установленными на них датчиками контроля прогиба, причем плоские пластины установлены в каждом из вапактности сборки всего комплекта профили- куумированных полостей параллельно рабо- рованных пластин могут иметься пазы 7),чей поверхности губок.
которые воспринимают это усилие, передают деформацию наклеенным на них датчикам контроля прогиба. Сопротивление датчиков изменяется и посредством электропроводников 9 регистрируется системой контроля сигналов (не показана) которая может быть выполнена по известной полумостовой или мостовой схеме при выполнении .датчиков контроля прогиба электротензометричес- кими. Пластины 6 закреплены по периметру в герметизирующих прокладках 5. При достижении прогиба профилированных пластин 4 большего, чем прогиб, обеспечивающий
вом винтов 12.
Формула изобретения
Схват манипулятора по авт. св. № 1119843, отличающийся тем, что, с целью повышения надежности, он снабжен плоскими пластинами с установленными на них датчиками контроля прогиба, причем плоские пластины установлены в каждом из вакуумированных полостей параллельно рабо- чей поверхности губок.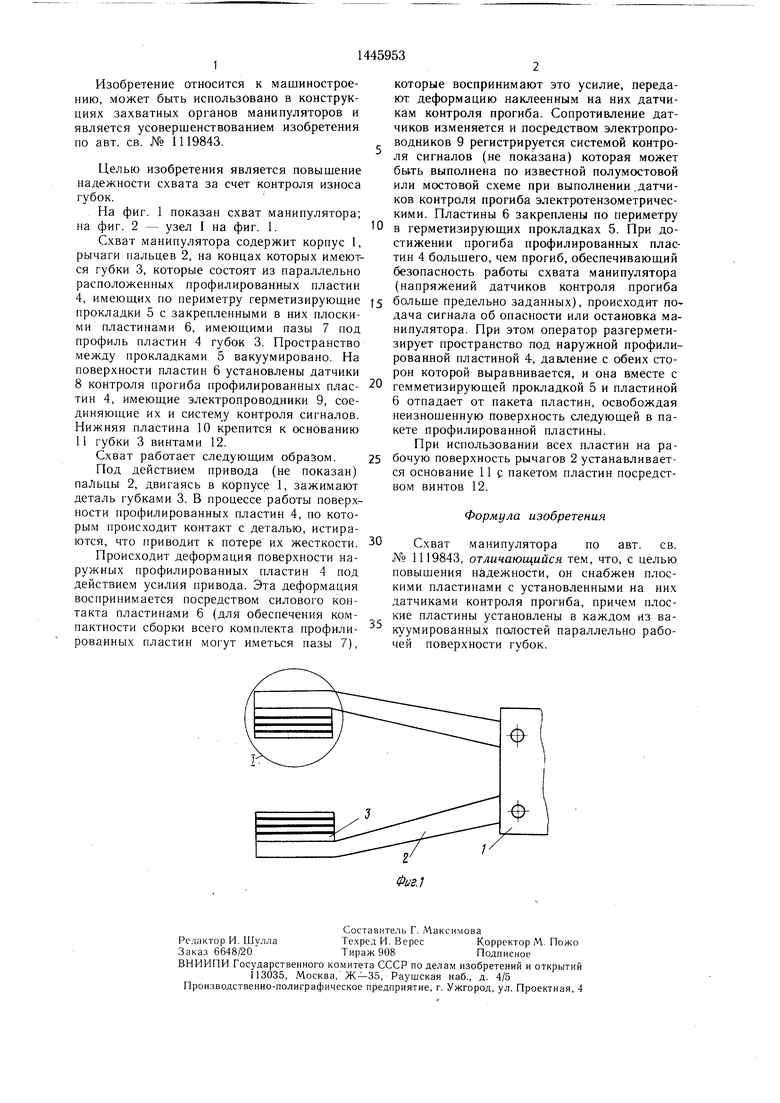
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1119843A1 |
| Схват манипулятора | 1988 |
|
SU1493461A2 |
| Схват манипулятора | 1979 |
|
SU850374A2 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Схват робота | 1984 |
|
SU1253771A1 |
| Очувствленный схват манипулятора | 1984 |
|
SU1178587A2 |
| Схват для цилиндрических деталей | 1984 |
|
SU1266734A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Схват манипулятора | 1986 |
|
SU1360981A1 |
| Схват манипулятора | 1987 |
|
SU1437221A1 |
Изобретение относится к машинострое нию и может быть использовано в конструкциях захватных органов манипуляторов. Цель изобретения - повышение надежности схвата за счет контроля износа губок. Для этого на губках между профилированными пластинами 4 расположены плоские пластины 6 с установленными на них датчиками 8 контроля прогиба профилированных пластин 4. В процессе работы поверхности профилированных пластин 4 истираются, что приводит к потере их жесткости. При достижении прогиба пластин 4 большего, чем прогиб, обеспечивающий безопасность работы схвата, происходит подача сигнала с датчиков 8 об остановке манипулятора. 2 ил.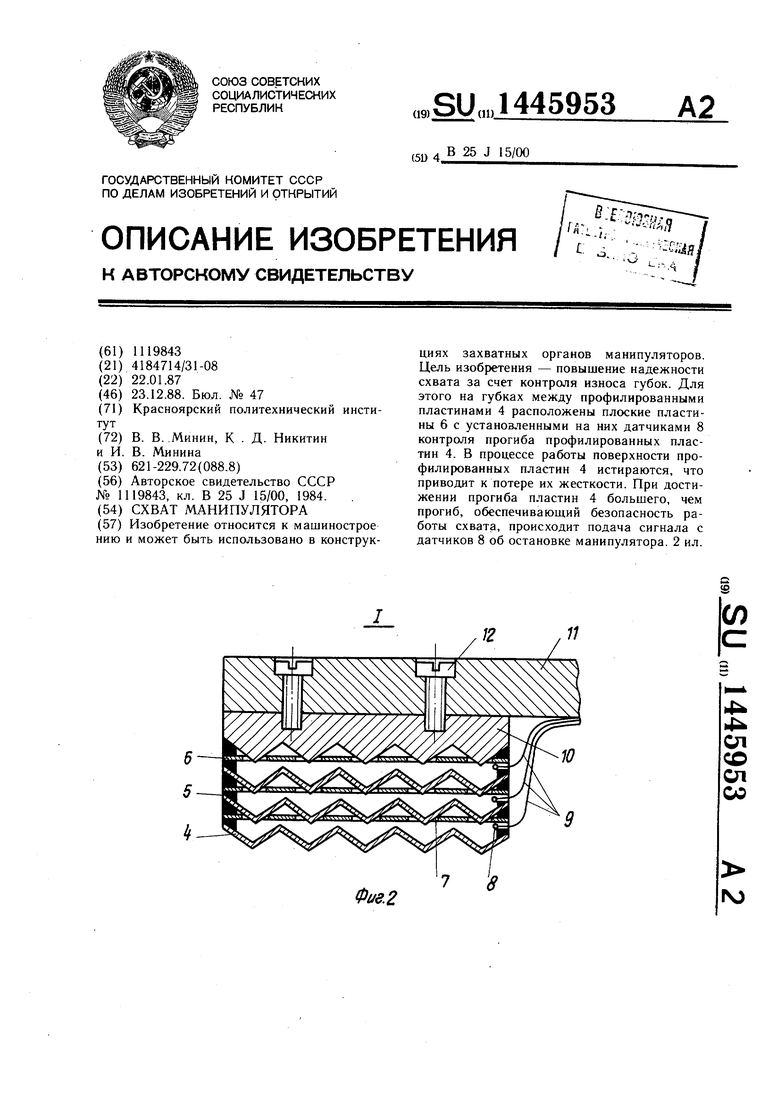
| Схват манипулятора | 1983 |
|
SU1119843A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
