А-А 1
70 3
О5 00
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захватное устройство промышленного робота | 1987 |
|
SU1419878A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |
| Захватное устройство для листовых изделий | 1973 |
|
SU637316A1 |
| Транспортное устройство автоматической линии спутникового типа | 1986 |
|
SU1447640A1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов, манипуляторов. Целью изобретения является расширение технологических возможностей за счет возможности захвата детален, лежаших на плоскости, с помощью робота, имеющего горизонтально расположенные руки. Захват манипулятора состоит из корпуса I, к которому жестко прикреплена скоба 2, в ко- пирных пазах которой располагаются оси, соединяющие два щарнирно-рычажных че- тырехзвенника со звеньями 3, 4, 5 и 6. Захватные рычаги расположены на звеньях 5 и 6. Ось 7 подпружинена относительно скобы 2. После подачи рабочей среды в полость корпуса поршень 9 через шток 10 и ось приводит в действие четырехзвенник. при этом зажимные рычаги на звеньях 5 и 6 сближаются, зажимая деталь. При уменьшении давления рабочей среды захват возвращается в исходное положение под действием пружины 11. 3 ил. ю (Л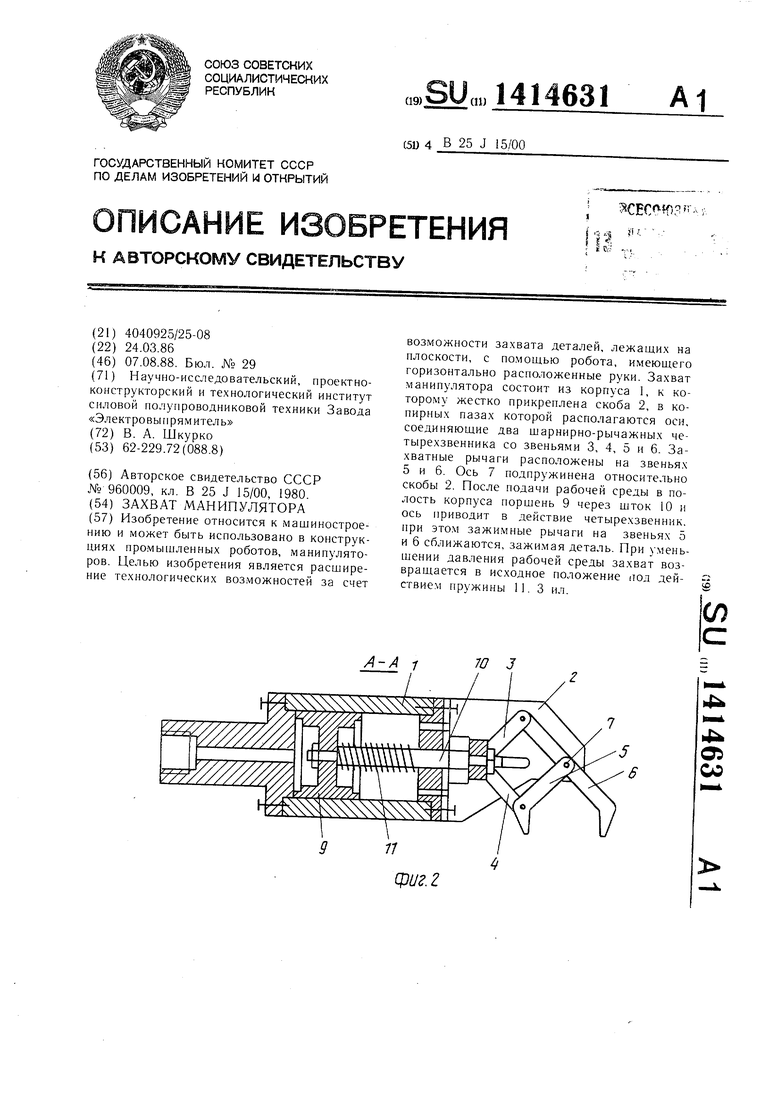
Фиг.г
Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов, манипуляторов.
Цель изобретения - расширение технологических возможностей за счет возможности захвата деталей, лежаш.их на плоскости, с помош,ью робота, имеющего горизонтально расположенные руки.
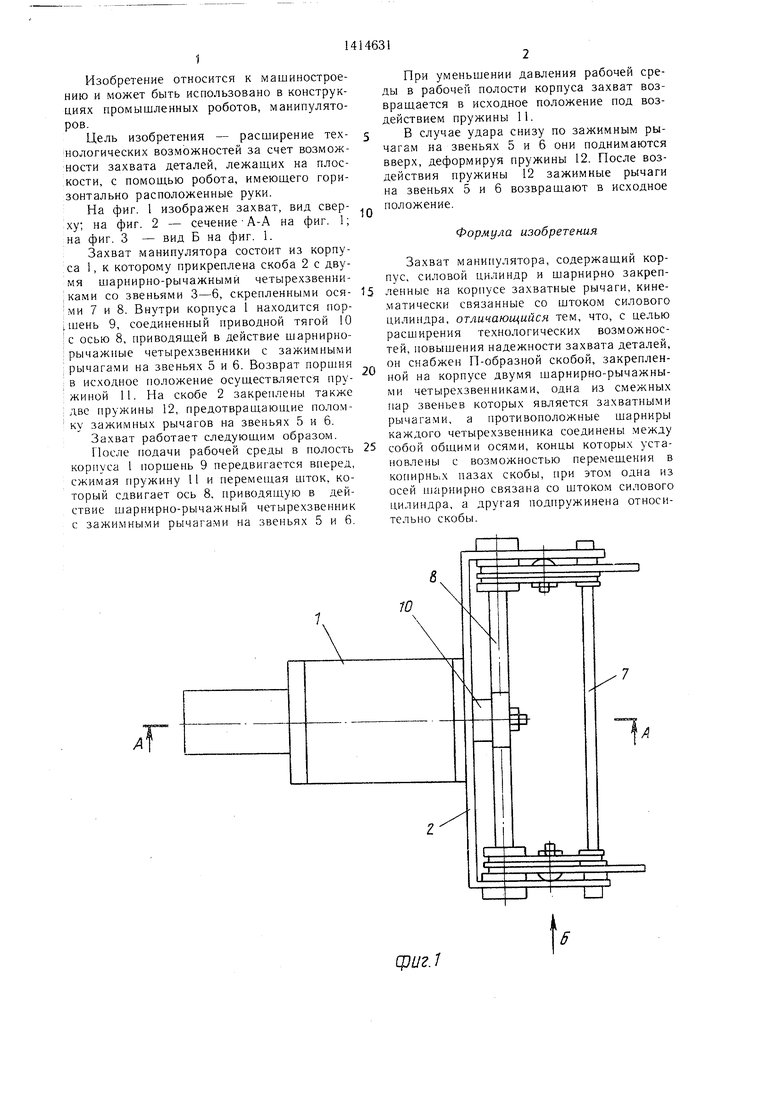
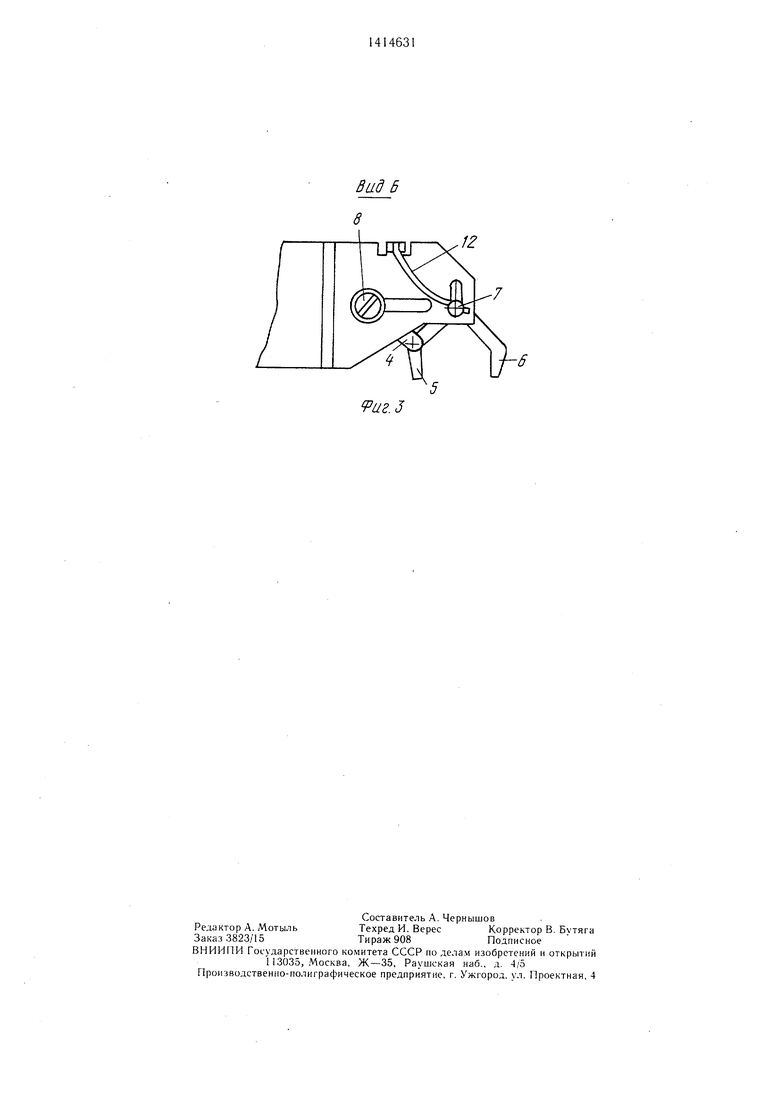
На фиг. 1 изображен захват, вид сверху; на фиг. 2 - сечение-А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Захват манипулятора состоит из корпуса 1, к которому прикреплена скоба 2 с двумя шарнирно-рычажнымй четырехзвенни- камн со звеньями 3-6, скрепленными ося- ми 7 и 8. Внутри корпуса 1 находится пор- 1шень 9, соединенный приводной тягой 10 k осью 8, приводящей в действие шарнирно- ; рычажные четырехзвенники с зажимными : рычагами на звеньях 5 и 6. Возврат поршня в исходное положение осуществляется пружиной 11. На скобе 2 закреплены также две пружины 12, предотвращающие поломку зажимных рычагов на звеньях 5 и 6.
Захват работает следующи.м образом.
После подачи рабочей среды в полость корпуса 1 поршень 9 передвигается вперед, сжимая пружину 11 и перемещая шток, который сдвигает ось 8, приводящую в действие шарнирно-рычажный четырехзвенник с зажи.мными рычагами на звеньях 5 и 6.
5
При уменьшении давления рабочей среды в рабочей полости корпуса захват возвращается в исходное положение под воздействием пружины 11.
В случае удара снизу по зажимным рычагам на звеньях 5 и 6 они поднимаются вверх, деформируя пружины 12. После воздействия пружины 12 зажимные рычаги на звеньях 5 и 6 возвращают в исходное положение.
Формула изобретения
Захват манипулятора, содержащий корпус, силовой цилиндр и шарнирно закрепленные на корпусе захватные рычаги, кинематически связанные со штоком силового цилиндра, отличающийся тем, что, с целью расширения технологических возможностей, повышения надежности захвата деталей, он снабжен П-образной скобой, закрепленной на корпусе двумя шарнирно-рычажны- ми четырехзвенниками, одна из смежных пар звеньев которых является захватными рычагами, а противоположные шарниры каждого четырехзвенника соединены между собой общими осями, концы которых установлены с возможностью перемещения в KoiiHpHbiX пазах скобы, при этом одна из осей шарнирно связана со штоком силового цилиндра, а другая подпружинена относительно скобы.
1, I Т
./
Bad Б
12
7
9иг.З
| Схват | 1980 |
|
SU960009A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
