., / Д1Р
И /и
ФтГ
Изобретение относится к машино- строениго и может быть использовано при автоматизации процессов механической обработки шглиилрическин де- талей.
Цель изобретения - упрощение конструкции комплекса за счет исключения привода поворота.
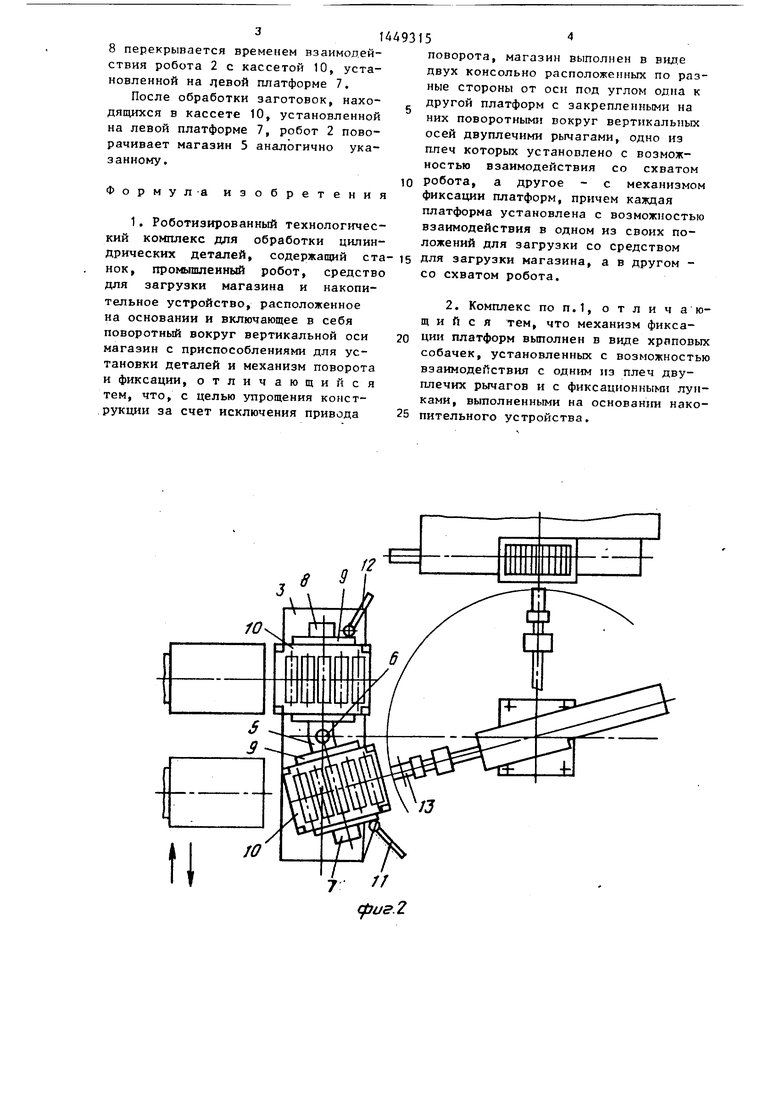
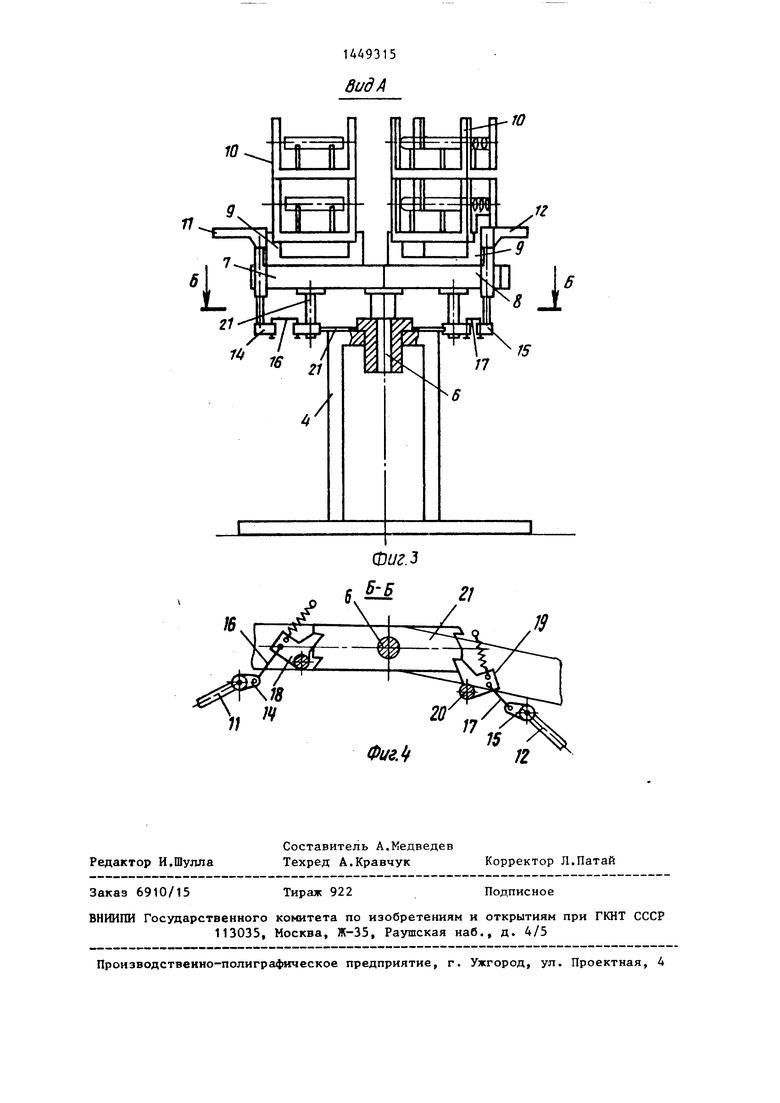
На фиг.1 изображен предлагаемый комплекс в одном из рабочих положений промышленного робота и накопительного устройства, вид сверху; на фиг.2 - то же, в другом положении промышленного робота и накопитель- ного устройства, на фиг.З - вид А на фиг.1; на фиг.4 - разрез Б-Б на фиг.3.
Роботизированный технологический комплекс (РТК) состоит из станка 1, промышленного робота 2, схват которого перемещается в цилиндрической системе координат, и накопительного устройства 3. Накопительное устрой- ство 3 состоит из основания 4 (фиг.З и магазина 5, имеющего возможност поворачиваться вокруг вертикальной оси 6, опоры которой смонтированы в основанш 4, Магазин 5 сое тоит из двух симметричных относительно оси 6 платформ 7 и 8, на которых смонтированы ложементы 9 кассет 10. Кассеты 10 имеют два уровня, на которых могут размещаться заготовки валов (фиг.З).
Угол ei (фиг.1 и 2) между платформами 7 и 8, обеспечивающий одновременное расположение одной из платформ параллельно траектории переме- щения средства для загрузки магазина, а другой - по нормали к траектории движения схвата робота, выбирается из расчета
. L
tgcA 2R
где L - размер кассеты в направлении нормальном линии вьщвижения охвата;
R - минимальное расстояние от оси схвата до начала координат.
На этот же угол / может поворачиваться магазин 5.
На платформах 7 и 8 смонтирован двуплечие рычаги, одно из плеч 11 и 12 которых предназначено для взаимодействия со схватом 13 робота 2, а
другое плечо 14 и 15 через тяги 16 и 17 воздействует на подпружиненные храповые собачки 18 и 19, оси которых 20 смонтированы на магазине 5. На основании 4 смонтирована планка
21с фиксационными лунками. Средство
22для загрузки магазина (например, кран-штабелер) доставляет кассеты 10 со склада к накопителю 3 станка 1.
РТК работает следующим образом.
Перегрузочное устройство средства 22 для загрузки магазина устанавливает кассету 10 с заготовками на ложементы 9 левой (если смотреть со стороны робота 2) платфорьлт 7 (фиг.1). Эта загрузочная операция .производится в то время, когда робот 2 берет заготовки из кассеты, установленной па право платформе 8, и загружает станок 1. Обработанную деталь iio6oT 2 устанавливает на нижний уровень этой кассеты. После обработки всех заготовок верхний уровень кассеты оказывается освобожденным ОТ заготовок, а обработанные детали находятся на нижнем уровне кассеты, и робот 2, двигаясь по программе, воздействует схватом 13 на плечо 12 двуплечего рычага. При этом плечо 15 двуплечего рычага через тягу 17, воздействует на под- прудиненную храповую собачку 19, выводит ее рабочий зуб из фиксационной лунки, и так как двуплечий рычаг 12-15 смонтирован на поворотном магазине 5, то дальнейшим воздействием на плечо 12 двуплечего рычага схват 13 робота 2 поворачивает магазин 5 на угол st. При этом храповая собачка 18, ось которой смонтирована на левой платформе 7, проскакивая средний зуб левой части планки 21, смонтированной на основании 4 западает в фиксационную лунку, обеспечивая фиксацию магазина 5 в новом положении.
Затем робот 2, поворачиваясь на угол 2, выходит в позицию взаимодействия с кассетой 10, установленной на левой платформе 7. При этом правая платформа 8 находится в положении, параллельном ходу средства 22 для загрузки магазина. В этом положении магазина 5 производится смена кассеты 10 с обработанными деталями на кассету с заготовками. Время смены кассет 10 на правой платформе
14493
8 перекрывается временем взаимодействия робота 2 с кассетой 10, установленной на левой платформе 7.
После обработки заготовок, находящихся в кассете 10, установленной на левой платформе 7, робот 2 поворачивает магазин 5 аналогично указанному.
Ф
ормула изобретени
1. Роботизированный технологический комплекс для обработки цилиндрических деталей, содержащий ста нок, промышленный робот, средство для загрузки магазина и накопительное устройство, расположенное на основании и включающее в себя поворотный вокруг вертикальной оси магазин с приспособлениями для установки деталей и механизм поворота и фиксации, отличающийся тем, что, с целью упрощения конструкции за счет исключения привода
0
5 5
154
поворота, магазин выполнен в виде двух консольно расположенных по разные стороны от оси под углом одна к другой платформ с закрепленными на них поворотными вокруг вертикальных осей двуплечими рычагами, одно из апеч которых установлено с возможностью взаимодействия со схватом робота, а другое - с механизмом фиксации платформ, причем каждая платформа установлена с возможностью взаимодействия в одном из своих положений для загрузки со средством для загрузки магазина, а в другом - со схватом робота.
2. Комплекс поп.1, отличающийся тем, что механизм фиксации платформ выполнен в виде храповых собачек, установленных с возможностью взаимодействия с одним из плеч двуплечих рычагов и с фиксационными лунками, вьтолненными на основании накопительного устройства.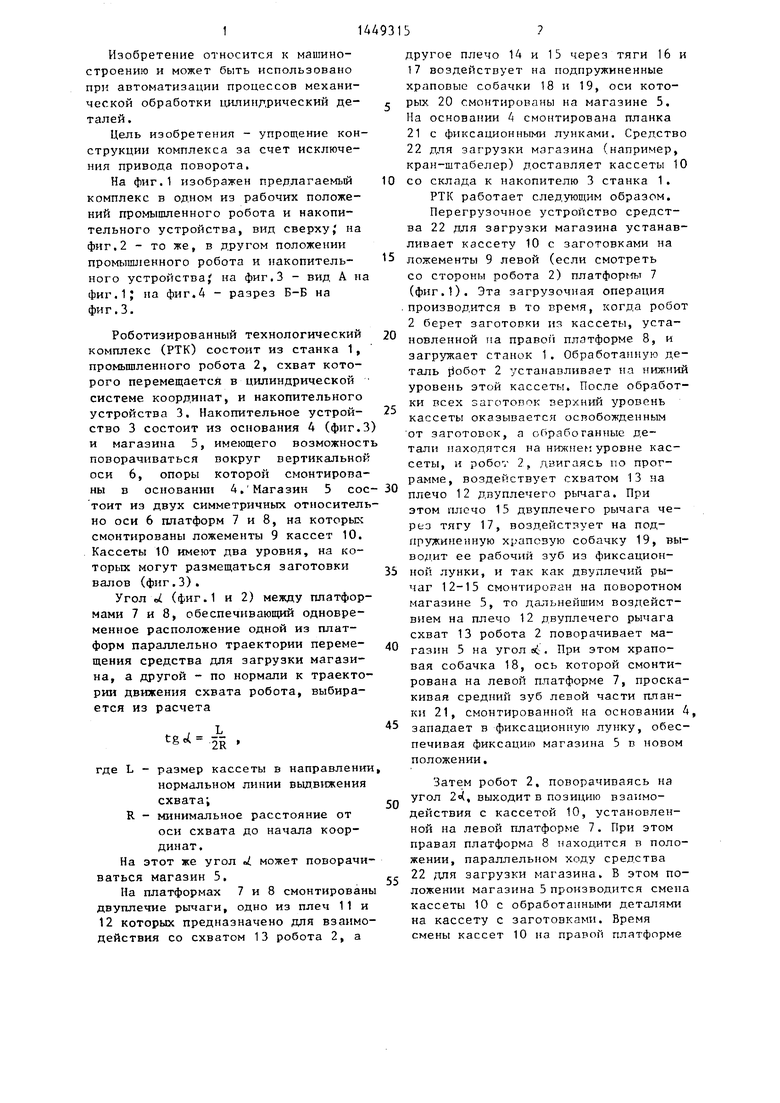
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно - накопительное устройство | 1990 |
|
SU1812056A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Устройство для перемещения заготовок | 1986 |
|
SU1400732A1 |
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
Изобретение относится к области машиностроения, в частности к роботизированным комплексам для обработки цилиндрических деталей. Цель изобретения - упрощение конструкции за счет исключения привода поворота. Для этого в комплексе, содержащем станок 1 с горизонтальным шпинделем, например токарным, промышленный робот 2 для установки и съема деталей, схват которого перемещается в цилиндрической системе координат, и накопительное устройство 3 с ярусными кассетами, перегрузка последних осуществляется средством 22 для эа- грузки магазина. Магазин выполнен в виде двух консольио расположенных по разные стороны от оси под углом друг к другу платформ 7 и 8, одна из которых устанавливается параллельно направлению перемещения транспортного средства, а другая - по нормали к траектории выдвижения схвата робота. Расфиксация, периодический поворот и фиксация магазина 5 в одной из двух позиций после заполнения очередной кассеты 10 обработанными изделиями осуществляется роботом через двуплечие рычаги. 1 з.п.ф-лы, 4-ил. о $ (Л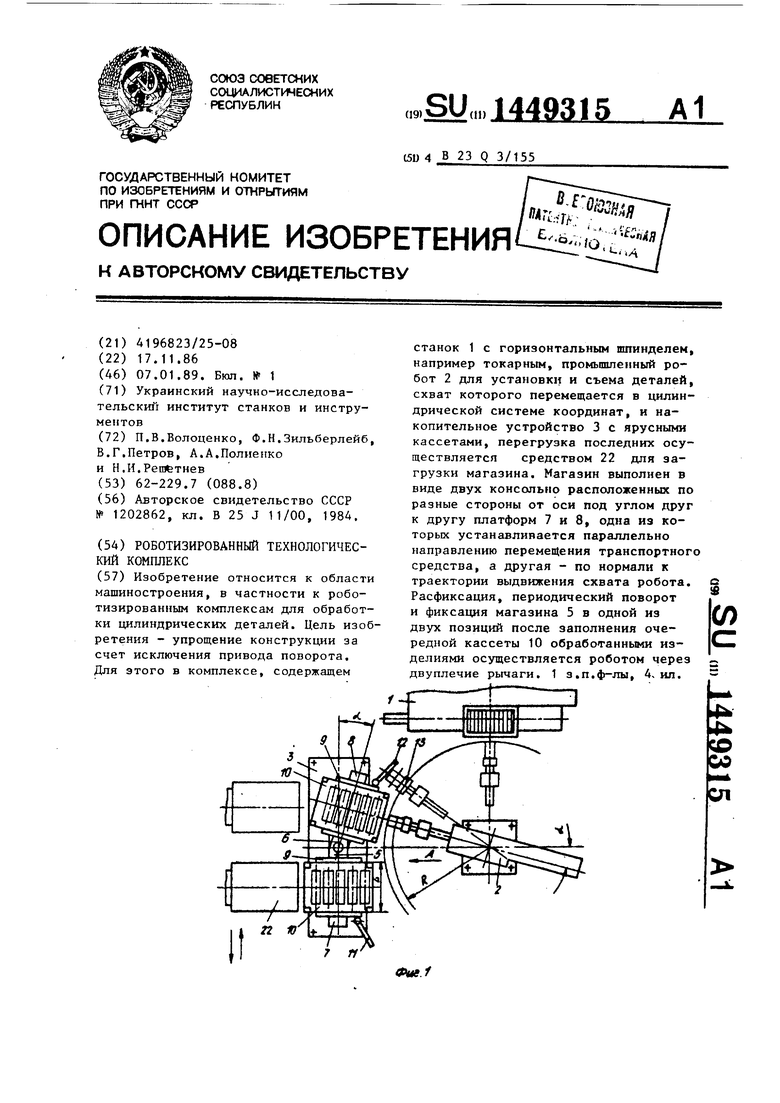
гд
Редактор И.Шулла
Составитель А.Медведев Техред А.Кравчук
Заказ 6910/15
Тираж 922
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
//
.з
21
13
Фиг.
Корректор Л.Патай
Подписное
| Робототехнологический комплекс | 1984 |
|
SU1202862A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
