(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1498608A1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| АВТОМАТ ДЛЯ СБОРКИ ВЕНТИЛЕЙ ТРУБОПРОВОДОВ | 1972 |
|
SU338346A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Манипулятор для переноса заготовок | 1982 |
|
SU1074651A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Способ установки комплекта уплотнительных колец и устройство для его осуществления | 1990 |
|
SU1779524A1 |
| Двухпозиционное захватное устройство манипулятора | 1988 |
|
SU1602736A1 |
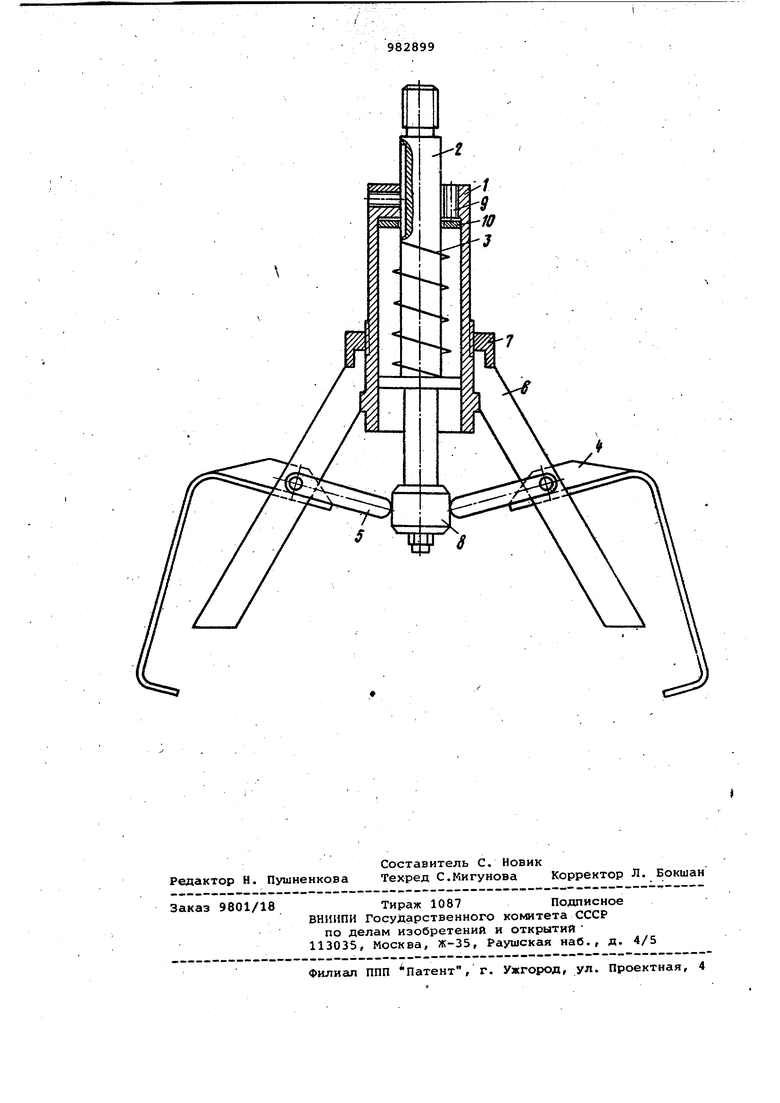
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, и может най ти применение при проведении погрузочно-разгрузочных работ с объектами, имеющими наружные выступы. Известен захват манипулятора, содержащий корпус, шток с кулачком упоры и захватные рычаги 1J. Недостатком известного захвата является сложность его сборки и бол шая материалоемкость конструкции. Цель изобретения - упрощение сборки и снижение материалоемкости. . Цель достигается тем, что захват снабжен накидной гайкой, на упорах выполнены хвостовики, а в корпусе пазы, в которых размещены хвостовики упоров, при этом накидная гайка размещена на наружной поверхности корпуса, охватывая хвостовики упоро а захватные рычаги размещены на упорах. На чертеже представлен захват манипулятора, общий вид. Захват манипулятора состоит из корпуса 1 и штока 2, имеющего возможность перемещения внутри корпуса 1. Верхним концом шток 2 соединяется с исполнительным механизмом мани пулятора (не показан). Корпус 1 удерживается на штоке 2 пружиной 3. На корпусе 1 шарнирно установлены захватные рычаги 4 (не менее двух) и размыкающие рычаги 5, причем разл«лкающие рычаги 5 имеют ограничение угла разворота относительно захватных рычагов. Корпус 1 снабжен пазами, в которые вставляются хвостовики inopoB б, которые замыкаются накидной гайкой 7, выполняющей роль замка. Упоры 6 снабжены отверстиями, в которых шарнирно установлены захватные рычаги 4 и размыкающие рычаги 5. На штоке 2 расположен кулачок 8, взаимодействующий с размыкающими рычагами 5. В верхней части корпуса 1 установлены регулировочные винту 9 и опорный диск 10. Захват манипулятора работает следующим образом. Исполнительный механизм манипулятора опускает захватное устройство на объект транспортировки. При этом под действием веса корпуса 1 пружина 3 деформируется на на некоторую величину. Величина деформации пружины 3 выбирается такой, чтобы кулачок 8 воздействовал на размыкающие рычаги 5, которые раскрывают
захватные рычаги 4, преодолевая усилие пружины 3, так как размыкающие рычаги 5 имеют ограничение угла поворота относительно захватных рычагов 4. При соприкосновении упоров 6 с объектом транспортировки исполнительный механизм продолжает опускаться. Шток перемещается на величину, необходимую для выхода кулачка 8 из взаимодействия с размыкающими рычагами 5, после чего освобождаются захватные рычаги 4, захватывая под действием пружин 3 объект трансггортировки. При подъеме захватного устройства крюки захватных рычагов 4 упираются в отбортовку объекта. Пружина 3 под действием веса корпуса 1 и объекта деформируется на некоторую величину, достаточную для того, чтобы при движении штока 2 вверх, кулачок 8, раздвигая размыкающие рычаги 5, которые в этом случае поворачиваются независимо от захватных рычагов 4, переместился в верхнее положение, при котором объект транспортировки поднят с поверхности При опускании груза на поверхность, захватные, рычаги 4 раскрываются вследствие того,.что выбирается деформация пружины 3, и кулачок 8 вступает во взаимодействие с размыкающими рычагами 5, после чего захватное устройство проходит в исходное положение. Для регулирования захватных рычагов 4 служат винты 9, которые, упираясь в опорный диск 10, изменяют положение корпуса 1 относительно штока 2, что обеспечивает необходимое йзаимодействие с размыкающими рычагами 5.
В результате внедрения предлагаемого технического решения удается упростить сборку конструкции, снизить ее вес, снизить затраты на изготовление.
Формула изобретения
Захватманипулятора, содержащий корпус, шток с кулачком, упоры и , захватные рычаги, отличающийся тем, что, с целью упрощелия процесса сборки захвата и уменьшения его материалоемкости, он снабжен накидной гайкой, на упорах выполнены хвостовики, а в корпусе пазы, в которых размещены хвостовики упоров, при этом накидная гайка размещена на наружной поверхности корпуса, обхватывая хвостовики упоров, а захватные рычаги размещены на упорах.
Источники информации, принятые во внимание при экспертизе
