1
Изобретение относится к устройст- вам для накопления, хранения и вы.- дачи деталей в ориентированном поло жении и может быть использовано в
машинос-троении преимудественно при создании робототехнологических комплексов и х иб.ких азтоматизированных производство
Цель изобретения -- раснгарение
технологических- возмох1ностей загрузо чного устройства за, сче-т подачи деталей разных размеров и кон-фигураций
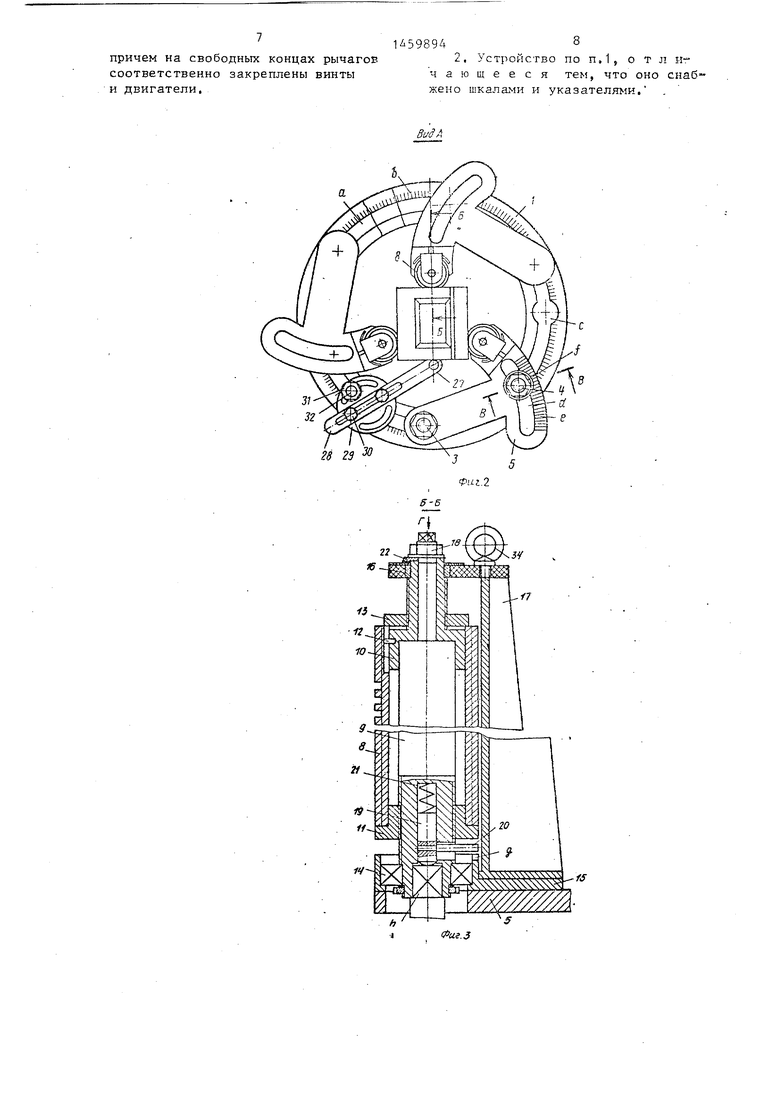
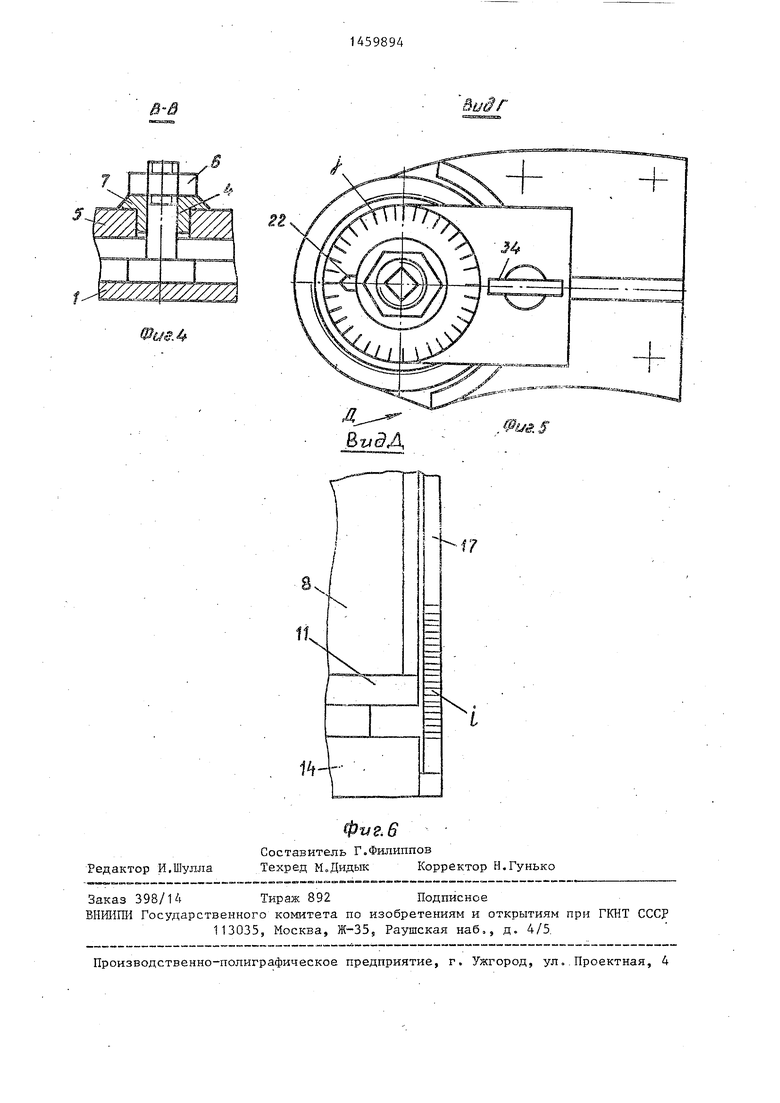
На фиг«- 1 изображено загрузочное устройство, о.бщий вид 5 на фиг о 2. вид А на фиг. 1| на фиг, 3 - разрез Б-Б jia фиг,. 2| на фиг,. 4 - разре.з В-В .на. фиг о 2| на фиг а 5 вид Г на фиг, .3| на фиг., б - вид Д - на
фиг t Ь е. .
Загрузочное устоойство содержит корпус 1 .и основание 2. Корпус и основание выполнены в виде одинаковых колец с замкнутьми Т-образньп- и паза ми а, сна6женныь«-1 шкалами Ъ, В пазы через .отверстия с вставлены болты 3 и 4, На болты. 3 и 4 надет Г-.образ- ньн. рычаг 5 и зз.жат гайками 6, В кшкдом рычаге 5 выполнен круговой .па d с центром, совпадающим с центром. отверстия под б.олт 3 Вдоль паза .на, несена шкала е Указателем этой шкалы является риска fj нанесенная на сухарь 7, которьгй установлен с
. возможностью перемещения вдоль паза d и. лишен возможности прозорота относительно паза Конец рычага 5, в котором вьшолнено отверстие под бол
. Зд округлен. Центр округления нахо
Q
5
0
30
35
5
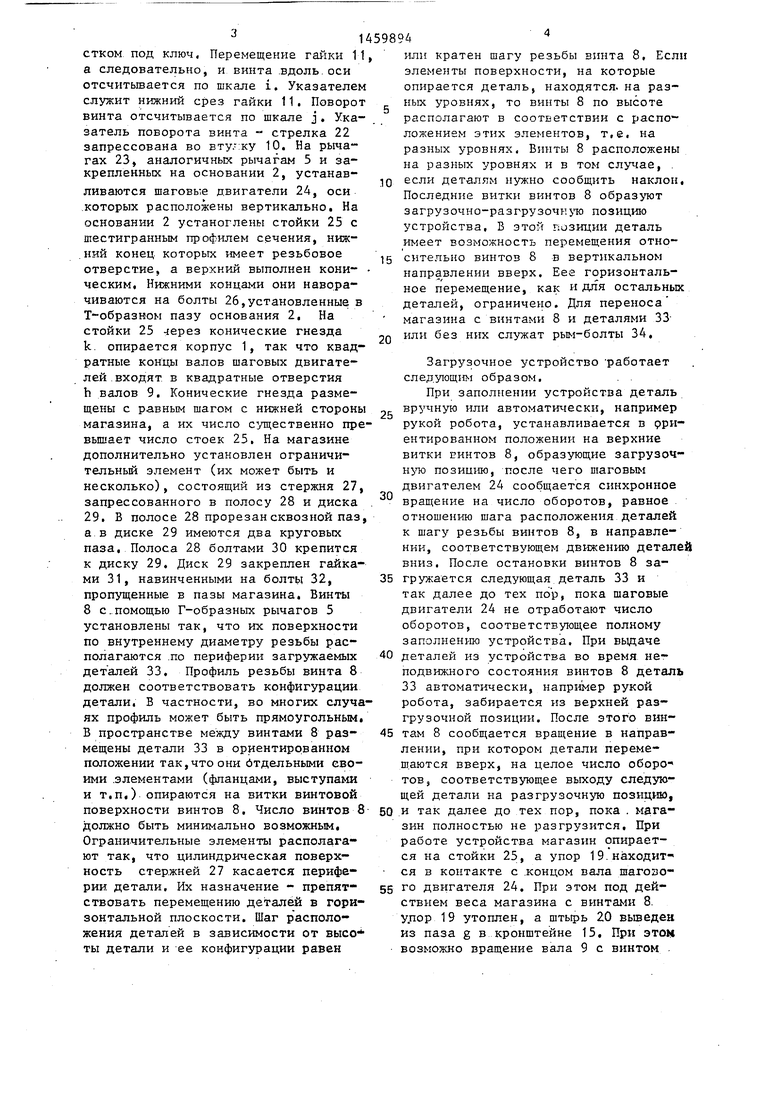
дитс.ч в центре . отверстия под болт 3. Срез этого.округления является указателем шкапы Ь при перемещении рычага 5 по корпусу 1, При различ-- нЪм положении рычага 5 в плане относительно, оси болта 3 положение скругленного среда рычага остается неизмен- кым, к рычагу 5, установленному на мага.зйне,. присоединены узлы крепления и регулировки винтов 8, Узел крехгления и регулирования винта 8 состоит из зала 9, на который посредством втулки 10 и гайки 11 надет -винт 8, выполненный в виде втулки. Поворот винта 8 относительно втулки - 10 предотвращается штифтом 12,. за- прессованньм во втулку 10 и входя- в паз, расположенный с внутренней стороны винта 8. Паз позволяет перемещать.винт 8 по вертикали относительно вала 9 и втулки 10.. Винт прижат гайкой 13 к гайке 11. Вал 9 нижним концом через подшипник 14 качения опирается на кронштейн .15 с пазом g, а.верхним через втулку 10 и подшипник 16 скольжения - на стойку 17„ Последняя закреплена на кронштейне 15, который крепится на Г-об- разном рьгааге 5. Втулка 10 фиксируется на валу гайкой.18. В нижней части вала 9 .выполнено квадратное отверстие h, Вьшеэ в .круглом осевом отверстии вала 9, установлен упор 19 с запрессованным в него штырем 20, проходящим сквозь паз в валу 9, Штырь 20 находится напротив наза g. Упор сверху поджат пружиной 2.1. Верхний конец ва.ла. 9 снабжен-- квадратным участком под ключ. Перемещение гайки 11 а следовательно, и винта .вдоль, оси отсчитьтается по шкале i. Указателем служит нижний срез гайки 11. Поворот винта отсчитывается по шкале j. Указатель поворота винта - стрелка 22 запрессована во вту.-:ку 10. На рычагах 23, аналогичных рычагам 5 и закрепленных на основании 2, устанавливаются шаговые двигатели 24, оси которых расположены вертикально. На основании 2 устаноглены стойки 25 с шестигранным профилем сечения, ниж- .НИИ конец которых имеет резьбовое отверстие, а верхний выполнен кони- ческим. Нижними концами они наворачиваются на болты 26,установленные в Т-образном пазу основания 2, На стойки 25 через конические гнезда k. опирается корпус 1, так что квадратные концы валов шаговых двигателей входят в квадратные отверстия h валов 9. Конические гнезда размещены с равным шагом с нижней стороны магазина, а их число существенно превышает число стоек 25. На магазине дополнительно установлен ограничи- тельньй элемент (их может быть и несколько), состоящий из стержня 27, запрессованного в полосу 28 и диска 29, В полосе 28 прорезан сквозной паз, а в диске 29 имеются два круговых паза. Полоса 28 болтами 30 крепится к диску 29. Диск 29 закреплен гайками 31, навинченными на болты 32, пропущенные в пазы магазина. Винты 8 с.помощью Г-образных рычагов 5 установлены так, что их поверхности по внутреннему диаметру резьбы располагаются .по периферии загружаемых дет алей 33. Профиль резьбы винта 8 должен соответствовать конфигурации детали, В частности, во многих случаях профиль может быть прямоугольным. В пространстве между винтами 8 размещены детали 33 в ориентированном положении так,что они бтдельными ево- ими .элементами (фланцами, выступами и т.п.) опираются на витки винтовой поверхности винтов 8, Число винтов 8 должно быть минимально возможным. Ограничительные элементы располагают так, что цилиндрическая поверхность стержней 27 касается периферии детали. Их назначение - препятствовать перемещению деталей в горизонтальной плоскости. Шаг расположения деталей в зависимости от высо- ты детали и ее конфигурации равен
5
0
или кратен шагу резьбы винта 8, Если элементы поверхности, на которые опирается деталь, находятся, на разных уровнях, то винты 8 по высоте располагают в соотЕетствии с расположением этих элементов, т,е, на разных уровнях. Винты 8 расположены на разных уровнях и в том случае, .
0 если деталям нужно сообщить наклон, Последние витки винтов 8 образуют загрузочно-разгрузочн то позицию устройства, В этой позиции деталь имеет возможность перемещения отно5 сительно винтов 8 в вертикальном напра влении вверх, Еее горизонтальное перемещение, как и для остальных деталей, ограничено. Для переноса магазина с винтами В и деталями 33- или без них служат рым-болты 34.
Загрузочное устройство работает следующим образом, . .
При заполнении устройства деталь вручную или автоматически, например рукой робота, устанавливается в рри- ентированном положении на верхние витки Еинтов 8, образующие загрузочную позицию, после чего шаговым двигателем 24 сообщается синхронное вращение на число оборотов, равное отношению шага расположения деталей к шагу резьбы винтов 8, в направлении, соответствующем движению деталей вниз. После остановки винтов 8 за5 гружается следующая деталь 33 и так далее до тех пор, пока шаговые двигатели 24 не отработают число оборотов, соответствующее полному заполненик устройства. При выдаче
0 деталей из устройства во время неподвижного состояния винтов 8 деталь 33 автоматически, напр1мер рукой робота, забирается из верхней разгрузочной позиции. После этого вин5 там 8 сообщается вращение в направлении, при котором детали переме- П1.аются вверх, на целое число оборо- тов, соответствующее выходу следующей детали на разгрузочную позицию,
0 и так далее до тех пор, пока . мдга- зин полностью не разгрузится. При работе устройства магазин опирается на стойки 25, а упор 19.находится в контакте с .концом вала шагозо5 го двигателя 24. При этом под действием веса магазина с винтами 8. упор 19 утоплен, а штырь 20 выведен из паза g в кронштейне 15, При этом возможно вращение вала 9 с винтом .
8. Когда магазин отделяют от основания 2, упор 19 под действием пружины 21 перемещается вниз. Штырь 20 при этом попадает в паз g кронштейна 15 и тем самым препятствует вращние валов 9 с винтами 8, .
Наладку загрузочного устройства производят при отделенном от основании 2 с двигателями 24 магазине, .так как вал 9 остается неподвижным и легко осуществить изменение положения винта 8 относительно вала 9, Для наладки устройства на определенную деталь производят следующие действия. Отпустив гайки 6, перемещают Г-образные рычаги 5 с винтами 8 вдоль Т-образных пазов а и вокруг болтов 3 в .нужное положение, о.пре- деляемое конфигурацией детали..В такое же п(5ложение по шкалам, анало Jгичным шкалам b и е, устанавливают рычаги 23 с шаговыми двигателями 24 :Если необходимо регулировать положение винтов 8 по высо те, то отпуска- ют гайку 13 и гайкой 11 перемещают винт 8 на величину. Плавную регулировку высоты расположения точек опоры детали 33 на поверхности витков винта 8 можно осуществить поворотом последнего. Этот поворот осуществляется при отпущенных гайка 11 и 18. При этом .В1 улка 10 расфик- сирована и.может поворачиваться отн сительно вала 9. В загрузочной системе гибкого автоматического произвдства может применяться большое колчество указанных винтовых магазинны загрузочных устройств. При зтом наладка первого устройства производится, по предварительно выполненному расчету по. шкалам или по готовой детали. Что касается других аналогичных устройств, то их следует налаживать, по шкалам, используя результат наладки первого устройства. Наладка ограничительных элементов производится при .отпущенных болтах 30 и гайках 31, Стержень 27 ограничительного элемента устанавливают в нужное положение, перемещая полосу 28 относительно диска 29 и диск 29 относительно магазина, после чего болты 30 и гайки 31 затягивают. Стойки. 25. при наладке размещают так чтобы каждая из них, находясь в.про межутках между рычагами 23, попадала верхней конической частью в одно из конических отверстий k магазина.
0
5
0
0
.Устройство позволяет накапливать, хранить и вьщавать детали широкого диапазона типоразмеров в ориентированном, в частности наклонном, положении, Наибольший выигрыш получается в том случае, когда оно применяется для автоматизации загрузки и разгрузки деталей, которые склонны к взаимному сцеплению или их форма не позволяет складировать изс в стопу, Отделение магазина от основания 2 позволяет созда ть загрузочно-разгру- зочную систе у1у гибкого автоматизированного, производства, в которой приводы размещены стационарно у технологических, машин на позициях загрузки или разгрузки, а магазины после разгрузки ши заполнения переносятся (автоматически или вр -чкую) с одной позиции на другую в соответствии с последовательностью технологических операций. При переходе на sarpysKy детали нового типоразме- 5 ра нанесенные на загрузочное устройство шкалы и указатели дают возможность переналадки и дальнейшего использования устройства. Формула изобретения
1, .Загрузочное устройство, содержащее основание, магазин, выполненный в виде одного или нескольких винтов, установленных параллельно друг другу с возможностью синхронного поворота вокруг своих осей и кинематически связанных с приводом, отличающееся тем, что, с целью расширения технологических возможностей, винты установлены на дополнительно введенном корпусе, выполненном съемным, при этом винты выполнены в виде втулок, установленных на дополнительно введенных валах с возможностью углового поворо- 5 та относительно последних и фиксации их углового положения, причем каждый винт снабжен соответствующим приводом, выполненным в виде шагового двигателя и установлен с возможностью . соединения с. последним, при этом каждьш винт и двигатель снабжены механизмом регулировки их положения, выполненным в виде Г-образ- ных рычагов, соответственно закрепленных на корпусе.и основании с возможностью поворота в плоскости, перпендикулярной оси винтов, оси которых установлены с возмолснрстью перемещения по кольцевой траектории.
5
0
0
5
причем на свободных концах рычагов соответственно закреплены винты и двигатели.
2, Устройство по п.1} о т л ич а ю Q5 е е с я тем, что оно снабжено шкалами и указателями,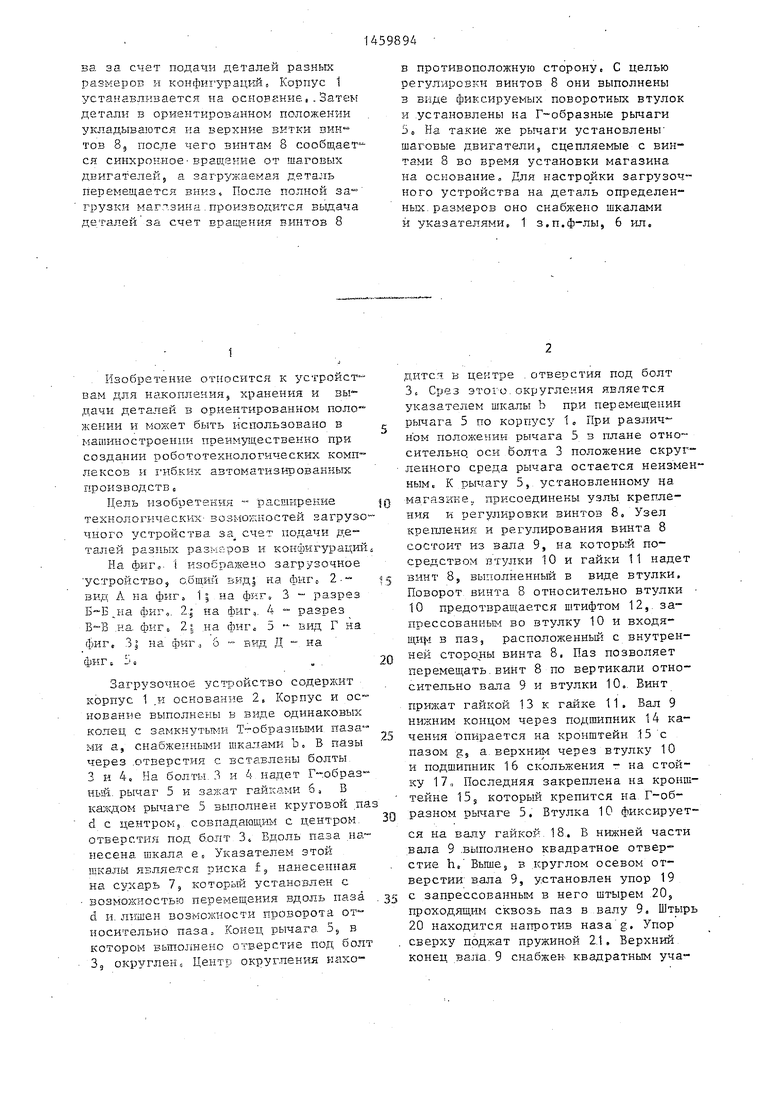

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Многопозиционное загрузочное устройство | 1984 |
|
SU1333533A1 |
| Многопозиционное загрузочное устройство | 1989 |
|
SU1705019A1 |
| Загрузочное устройство | 1991 |
|
SU1815134A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Устройство для контроля и сортировки многогранных пластин | 1981 |
|
SU1079309A1 |
| Устройство для сборки под сварку металлоконструкций | 1990 |
|
SU1738573A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
| Станок для шлифования торцевых поверхностей деталей | 1981 |
|
SU1116976A3 |
| АВТОМАТ ДЛЯ СБОРКИ ВЕНТИЛЕЙ ТРУБОПРОВОДОВ | 1972 |
|
SU338346A1 |
Изобретение относится к устрой- ствам для накопления , хранения и вьщачи деталей в ориентированном положении и может быть использовано в машиностроение преимущественно при создании робототехнологических комплексов и гибких автоматизированных производств. Целью изобретения является расширение технологических возможностей загрузочного устройст
Фиг.З
| Отсекатель | 1958 |
|
SU121329A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
